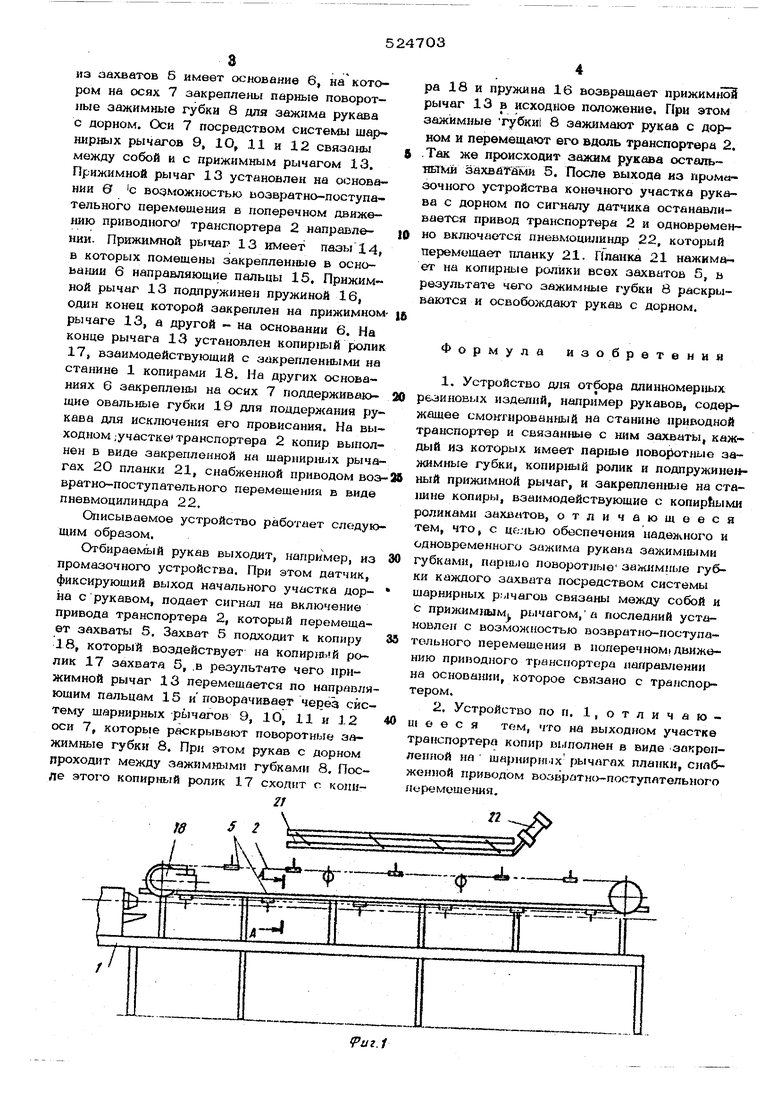
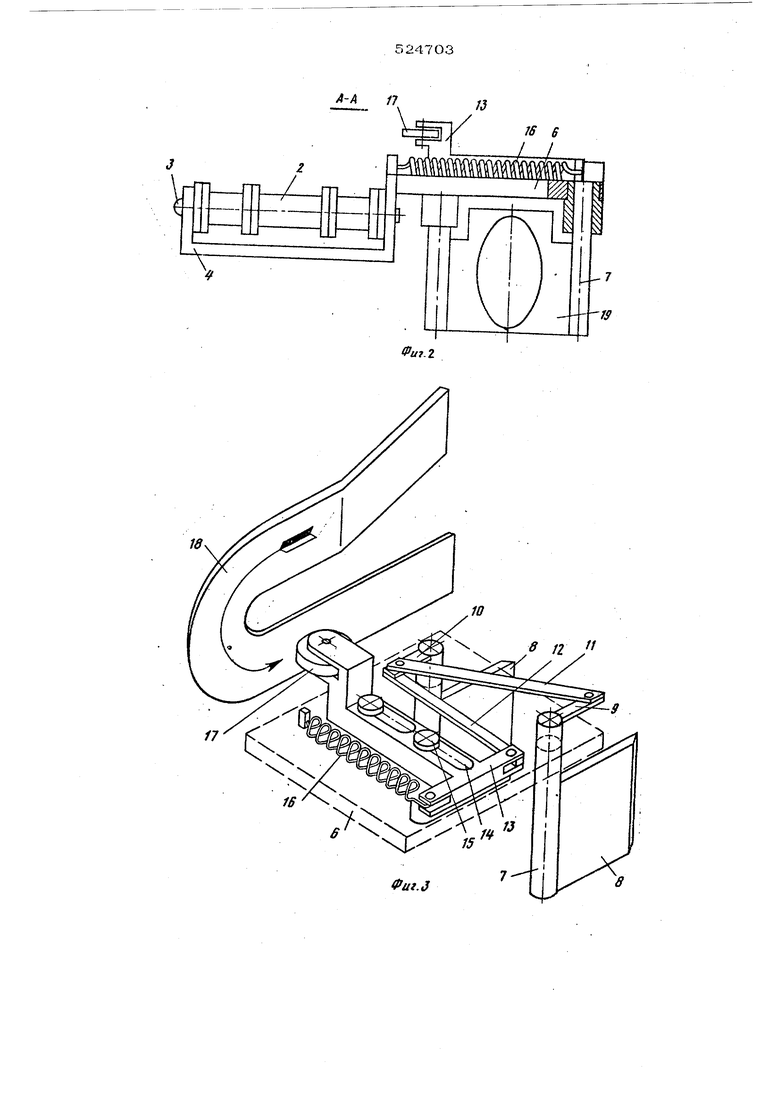
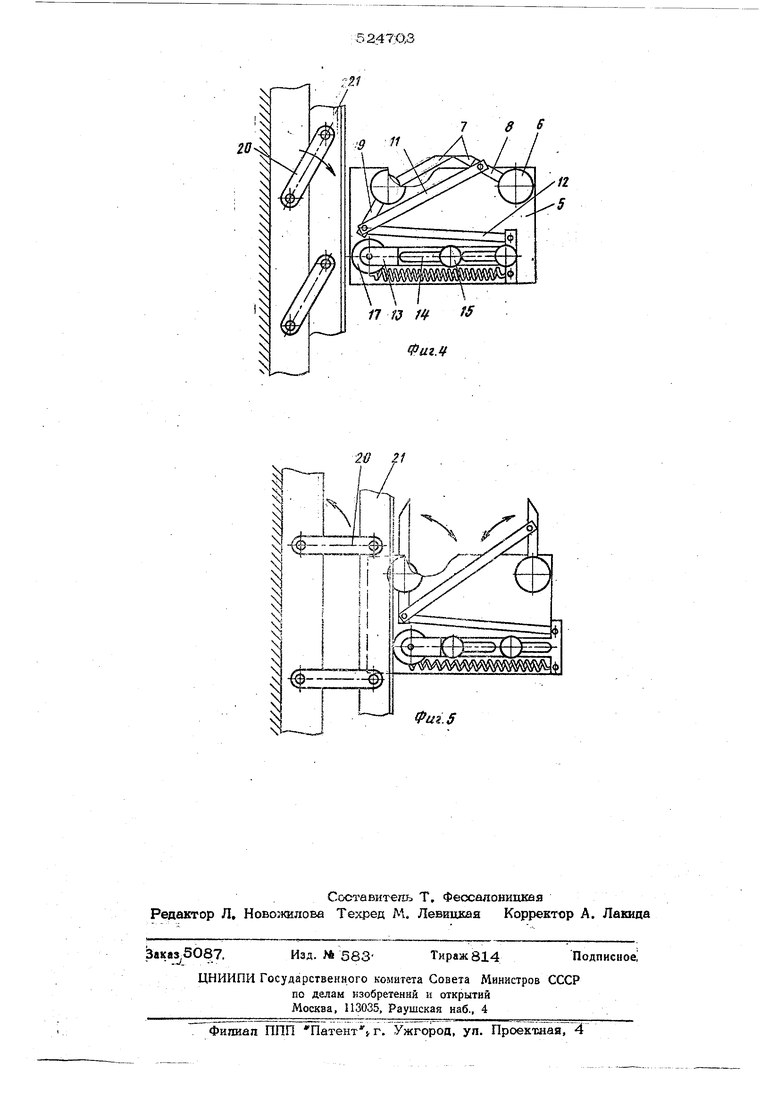
из аахватов 6 имеет основание 6, на котором на осях 7 закреплены парные поворотные зажимные губки 8 для зажима рукава с дорном. Оси 7 посредством системы шарHiipHbJX рычагов 9, Ю, 11 и 12 связаны между собой и с прижимным рычагом 13. Прижимной рычаг 13 установлен на основании 0 с возможностью возвратно-поступательного перемещения в поперечном движению приводного транспортера 2 направлении. Прижимной рычаг 13 имеет пазы 14, в которых помещены закрепленные в основавши 6 направляющие пальцы 15, Прижимной рычаг 13 подпружинен пружиной 16, один конец которой закреплен на прижимном рычаге 13, а другой - на основании 6. На конце рычага 13 установлен копирный ролик 17, взаимодействующий с закрепленными на станине 1 копирами 18, На других основаниях 6 закреплены на осях 7 поддерживающие овальные губки 19 для поддержания рукава для исключения его провисания. На выходном Jучастке транспортера 2 копир выполнен в виде закрепленной на шарниршлх рычагах 20 планки 21, снабженной приводом воэ вратно-поступательного перемещения в виде пневмоцилиндра 22, Описываемое устройство работает следую щим образом. Огбираемоый рукав выходит, например, из промазочного устройства. При этом датчик, фиксирующий выход начального участка дорна с рукавом, подает сигнал на включение привода транспортера 2, который перемещает захваты 5. Захват 5 подходит к копиру 18, который воздействует на копирный ролик 17 захвата 5, .в результате чего прижимной рычаг 13 перемещается по направля ющим пальцам 15 и поворачивает через систему шарнирных рь1чагов 9, 10, 11 и 12 оси 7, которые раскрывают поворотные зажимные губки 8. При этом рукав с дорном Проходит между зажимными губками 8, После этого копирный ролик 17 сходит с копиа 18 и пружина 16 возвращает прижим юй ычаг 13 в исходное положение. При этом ажимные губки 8 зажимают рукай с дорном и перемещают его вдоль транспортера 2, Так же происходит зажим рукава осталь.тми захвйТами S. После выхода из примазонного устройства конечного участка рукава с дорном по сигналу датчика останавливается привод транспортера 2 и одновременно включается пневмоцилиндр 22, который перемешает планку 21. Планка 21 нажимает на копирные ролики всех захватов 5, в результате чего зажимные губки 8 раскрываются и освобождают рукав с дорном. Формула изобретения 1. Устройство для отбора длинномерных резиновых изделий, например рукавов, содержащее смонтированный на станине приводной транспортер и связанные с ним захваты, каждый из которых имеет парные поворотные зажимные губки, копирный ролик и подпружине ный прижимной рычаг, и закрепленные на ста1шне копиры, взаимодействующие с копир{1ыми роликами захватов, отличающееся тем, что, с целью обеспечения надежного и одновременного зажима рукава зажимными губками, поворотные зажимные губки каждого за.хвата посредством системы шарнирных рмчагов связаны между собой и с прижимным, рычагом, а последний установлен с возможностью возвратно-поступаTcwiibHoro перемещ.ения в поперечном (Движению приводного транспортера направлении на основании, которое связано с транспортером. 2. Устройство по п, 1, о т л и ч а ю щ е е с я том, что на выходном участке транспортера копир ш.гполнен в виде закрепленной на щарнирн1.1х рычагах планкл, снпбженной приводом воовратно-поступательного перемещения.
-4-/4 /7
-W
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1986 |
|
SU1349853A1 |
| Автомат для резки капиллярных труб | 1986 |
|
SU1360919A1 |
| Автоматическая поточная линия для наплавки | 1972 |
|
SU440229A1 |
| Станок для изготовления бортовых крыльев покрышек пневматических шин | 1989 |
|
SU1593972A1 |
| Установка для армирования керамических изделий | 1982 |
|
SU1057291A1 |
| Швейная машина | 1981 |
|
SU985170A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Автомат для предмонтажной обработки электрических шнуров | 1988 |
|
SU1642542A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ НЕПРЕРЫВНО ДВИЖУЩИХСЯ ТРУБ | 1992 |
|
RU2056981C1 |
| Устройство для распаковки тары | 1990 |
|
SU1785959A1 |
17
11
в
Фиг.д
8 S
ФигЛ
Фт.5
