диненного с выходом операционного усилителя с ограничением.
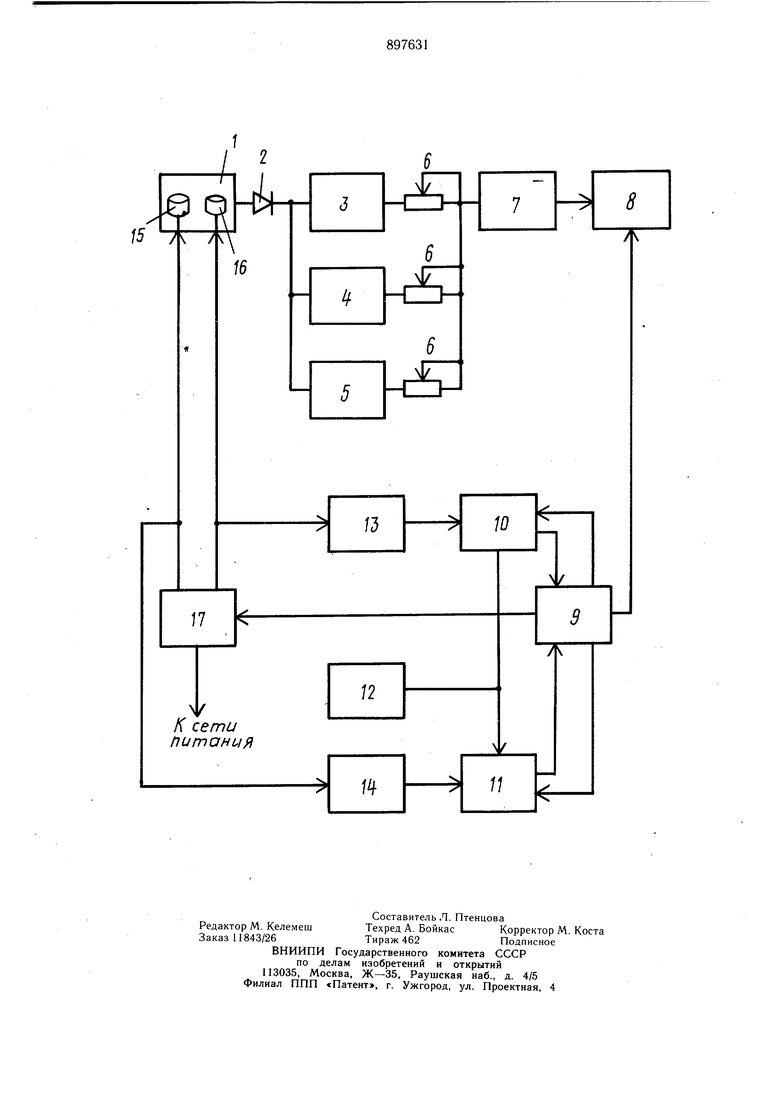
На чертеже представлена функциональная схема предлагаемого устройства.
Устройство содержит датчик 1 угловой скорости качки, фазочувствительный выпрямитель 2, дифференцирующий 3, инвертирующий 4 и интегрирующий 5 операционные усилители, элементы масштабирования б, операционный усилитель с ограничением 7, нелинейный масштабирующий блок 8, блок управления и сигнализации 9. блоки сравнения 10 и II, задатчик тока 12, измерители тока 13 и 14, подключенные входами к цепям питания датчика 1 углов.ой скорости качки, содержащего два кинематически связанных гиромотора 15 и 16, коммутатор 17, подключающий сеть питания к цепям питания датчика 1 угловой скорости качки.
Устройство работает следующим образом.
По команде блока 9 управления и сигнализации коммутатор 17 подключает гиромоторы 15 и 16 к цепи питания. Сигналы по ускорению, скорости и углу качки, выработанные датчиком 1, выпрямителем 2 и операционными усилителями 3, 4 и 5, поступают через элементы масштабирования 6 на вход операционного усилителя с ограничением 7. Цепи питания гиромоторов 15 и 16 контролируются измерителями тока 13 и 14, которые выдают соответствующие сигналы в блоки сравнения 10 и 11. В этих блоках происходит сравнение токов контролируемых цепей с эталонным сигналом задатчика 12.
Нормальная работа устройства предусматривает работу двух гиромоторов 15 и 16 в составе датчика 1, при этом компенсируется влияние интенсивной килевой качки на работу датчика 1, предназначенного для измерения угловой скорости бортовой качки.
В случае цепи питания одного из гиромоторов, например 16, или заклинивания его ротора измеритель тока 13 выдает сигнал, соответствующий нарушению нормальной работы гиромотора 16, при этом блок сравнения 10 выдает сигнал в блок управления и сигнализации 9. По этому сигналу блок 9 выдает команды: в коммутатор 17 на отключение цепи питания неисправного гиромотора; на отключение блока сравнения 10 от цепи питания; в нелинейный масштабирующий блок 8 на изменение масштаба управляющего сигнала, приходящего от операционного усилителя 7, а также выдаст сигнал на световое табло о выходе из строя одного из гиромоторов.
После этого устройство продолжает работать. Точность устройства практически
не изменяется, так как уменьшение крутизны сигнала датчика 1 компенсируется нелинейным масштабирующим блоком 8, и лишь при наличии интенсивной килевой качки точность устройства может несколько снизиться.
Таким образом, в предлагаемом устройстве Обеспечивается повышение надежности устройства за счет обеспечения работоспособности его в случае выхода из строя одного из гиромоторов датчика угловой скорости качки, при этом в зависимости от -условий эксплуатации точность устройства может остаться прежней, либо незначительно уменьшиться за счет влияния килевой качки. В случае выхода из строя одного из гиромоторов в устройстве обеспечен автоматический переход на работу датчика угловой скорости качки с одним гиромотором, а также контроль и диагностика состояния устройства при работе одного или двух гиромоторов и возможность быстрого обнаружения и устранения неисправности.
Ф,ормула изобретения
Устройство для формирования сигнала управления бортовыми рулями успокоителя качки судна по авт. св. № 484123, отличающееся тем, что, с целью повышения надежности и расширения функциональных возможностей устройства, оно содержит первый и второй измерители тока, первый и второй блоки сравнения, блок управления и сигнализации, нелинейный масштабирующий блок, задатчик тока и коммутатор, первый выход которого подключен к первому входу датчика, угловой скорости качки и входу первого измерителя тока, второй выход - к второму входу датчика угловой скорости качки и входу второго измерителя тока, а вход - к первому выходу блока управления и сигнализации, второй и третий выходы которого соединены с первыми входами соответственно первого и второго блоков сравнения, вторые входы которых подключены к выходам соответственно первого и второго измерителей тока, третьи входы - к задатчику тока, а выходы - соответственно к первому и второму входам блока управления и сигнализации, четвертый выход которого соединен с первым входом нелинейного масштабирующего блока, вторым входом соединенного с выходом операционного усилителя с ограничением.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 484)23, кл. В 63 В 39/06, 1973 (прототип).
te
/5
16
7
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор успокоителя качки корабля | 1983 |
|
SU1080190A1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| КОРАБЕЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2000 |
|
RU2165063C1 |
| Система формирования выходного сигнала блоков демпфирующих гироскопов | 2017 |
|
RU2676049C1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Следящий привод стабилизации бортовой и килевой качки | 2020 |
|
RU2766552C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| СИСТЕМА КОНТРОЛЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2342638C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ УСПОКОИТЕЛЕМ КАЧКИ СУДНА | 1991 |
|
RU2013295C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
17
/Г сети
numoHLifi
W
/7
