I
Изобретение относится к пневматическим матричным коммутаторам, предназначенным для введения программы в числовые и цикловые системы программного управления.
Известны пневматические матричные коммутаторы, содержащие матричную панель с отверстиями под штеккеры и обегающее устройство, обеспечивающее последовательную подачу питания к впускным каналам матричной панели. Матришые панели из- вестных гшевматических коммутаторов со держат взаимно пересекающиеся впускные и вь;nycKHbie каналы, в узлах пересечения которых располагаются штеккерные гнезда, каждое из них имеет распределительное устройство, вы полненное з виде клапанного устройства шлангового типа с обратными клапанами различной конструкции. Известные 1шевмати-ческие матричные кo iмyтaтopы характеризуются большим количеством клапанных устройств, соотзегствуюищх числу гнезд матричной панели и возрастаю1Щ1М с увеличением емкости памяти матричного коммутатора. Известен также пневматический коммутатор, содержащий матричную панель с ря
дами штеккерных отверстий, размещенных на одной из сторон матричной панели, на другой стороне которой неподвижно закреплена рейка обегающего устройства с направляющими, и считывающую головку с коаксиально расположенными в ней питающими и приемными соплами, соосными штеккернымотверстиям и соединенными соответственно с каналом питания и выходными каналами; и шаговьш пневмопривод. В каждом отверстии матричной панели коммутатора установлено пневматическое реле, выполненное в виде подпружиненного притертого поршня с выступающим кондо1 -штеккером. Этот известный коммута1х р характеризуется трудоемкостью HaroTOBjieHilS: матричной пане/хя, наличием притертой пары поршень-корпус пневмореле и относительно большими габаритами.
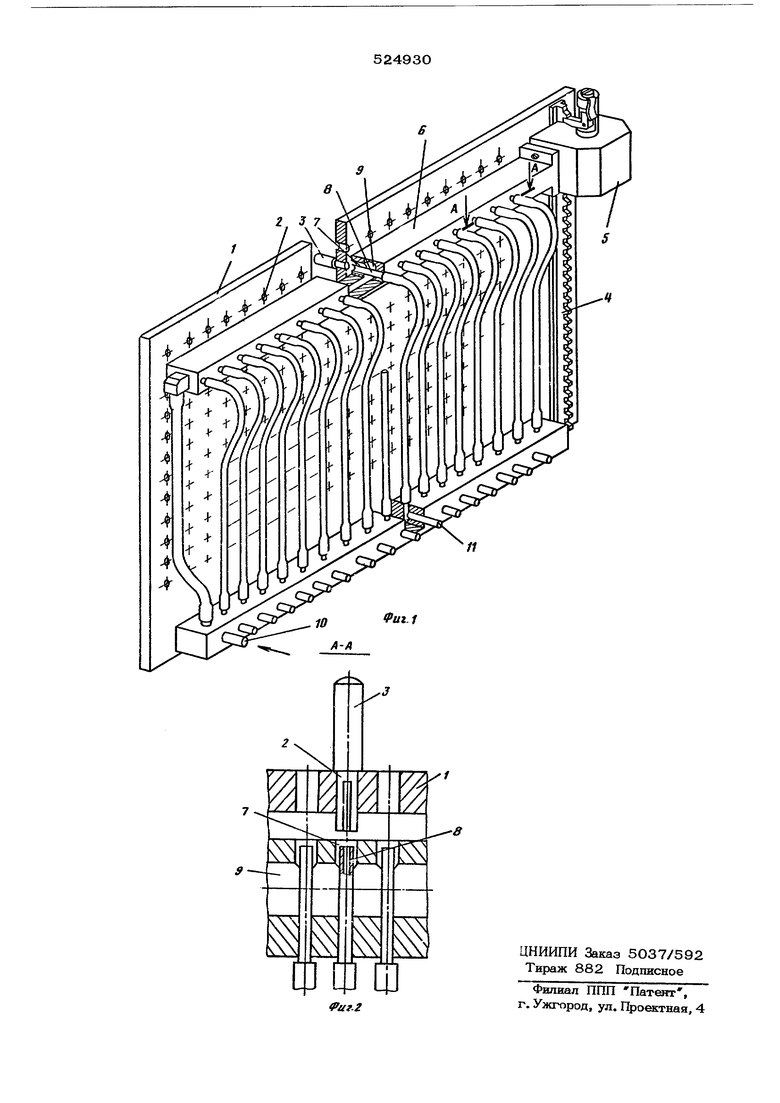
Целью изобретения является упрощение кснстр тсции. в описываемом пневматическом коммутаторе это достигается тем, что в нем считывающая головка соединена с шаговым пневмоприводом, кинематически связанным с рейкой обегающего устройства. На фиг. 1 показан описываемый пневматический коммутатор, общий вид; на фиг. 2сечение по А-А на фнг. 1. Пневматический коммутатор содержит матричную панель 1, на одной из сторон ко торой с шагом 5-6 мм расположены OTBej стия 2 для установки в них шгеккеров 3 и обегающее устройство, расположенное на другой стороне матричной панели. Обегающее устройство имеет закрепленную на одной стороне матричной панели рейку 4 с направляющими и подвижную часть из шаго- B(jro пневмопривода 5 и прикрепленной к не му считывающей головки 6, в которой выполнены питающие сопла 7 по числу отверстий строки и приемные сопла 8. Считываю щая головка прикреплена винтами к корпусу пневмопривода и установлена с зазором ОД О,2 мм по отношению к матричной панели 1 параллельно ее строкам. Расположение обегающего устройстьа может быть различным справа, как показано на фиг. 1, слева или посередине. Считывающая головка содержит камеру питания 9, соединенную шлангом с кяналом питания 1О. Питающие сопла 7 выполнены в виде сверлений, входящих в пи тающую камеру, а приемные сопла 8 прюд- ставпяют собой трубки, запрессованные коаксиально с питающими соплами в считывающую головку и соединенные шлангами с выходными каналами 11. Считывающая головка 6 устанавливается пневмоприводом 5 в позицию считывания так, чтобы оси прнекшых 8 и питающих 7 сопл совпадали с осями соответствующих отверстий под штеккеры считываемой строки. В камеру питания 9 считывающей головки от канала питания 1О подается сжатый воздух низкого давления, который, проходя через питаюише сопла 7, ощупывает отверстия 2 считываемой строки матричной панели. При наличии штеккера 3 в отверстии матричной панели 1 струя сжатого воздуха, выходящая из питающего сопла 7, взаимодействует со щтеккером и, отражаясь от него, попадает в приемное сопло 8. Если штеккер отсутствует, струя сжатого воздуха рассеивается в атмосферу и не попадает в приемное сопло. Таким образом, на выходах пневматического коммутатора формируется комбинация единичных и нулевых сигналов, соответствующая заданной на считываемой строке ме тричной панели. Перемещениеivj считывающей головки 6 по рейке 4 шаговым пневмоприводом 5 с одной строки на другую строку осуществляется бесконтактное считывание программы, набранной на матричной панели. В описываемом коммутаторе тможно получать емкость памяти, имеющую до 2ООО и более точек программирования при расстоянии между отверстиями под штеккеры порядка 5-6 мм. При этом трудоемкость изготовления матричного коммутатора уменьшается в 1,5-2 раза. Он может быть использован в системе числового программного управления деревообрабатывающего станка для раскроя отделанных мебельных щитов типа ПТ-2. а также в цикловых и числовых системах программного управления станков, прессов, промышленных роботов и других машин для введения програмы. Формула изобретения Пневматический коммутатор, содержащий матричную панель с рядами штеккерных отверстий, размещенных на одной из сторон матричной панели, на другой сторюне которой неподвижно закреплена рейка обегающего устройства с направляющими, считывающую головку с коаксиально расположенными в ней питающими и приемными соплами, соосными штеккерным отверстиям и соединенными соответственно с каналом питания и выходными каналами, и шаговый пневмопривод, отличающийся тем, что, с целью упрощения коммутатора, считывающая головка соединена с шаговым пневмоприводом, кинематически связанным с рейкой обегающего устройства.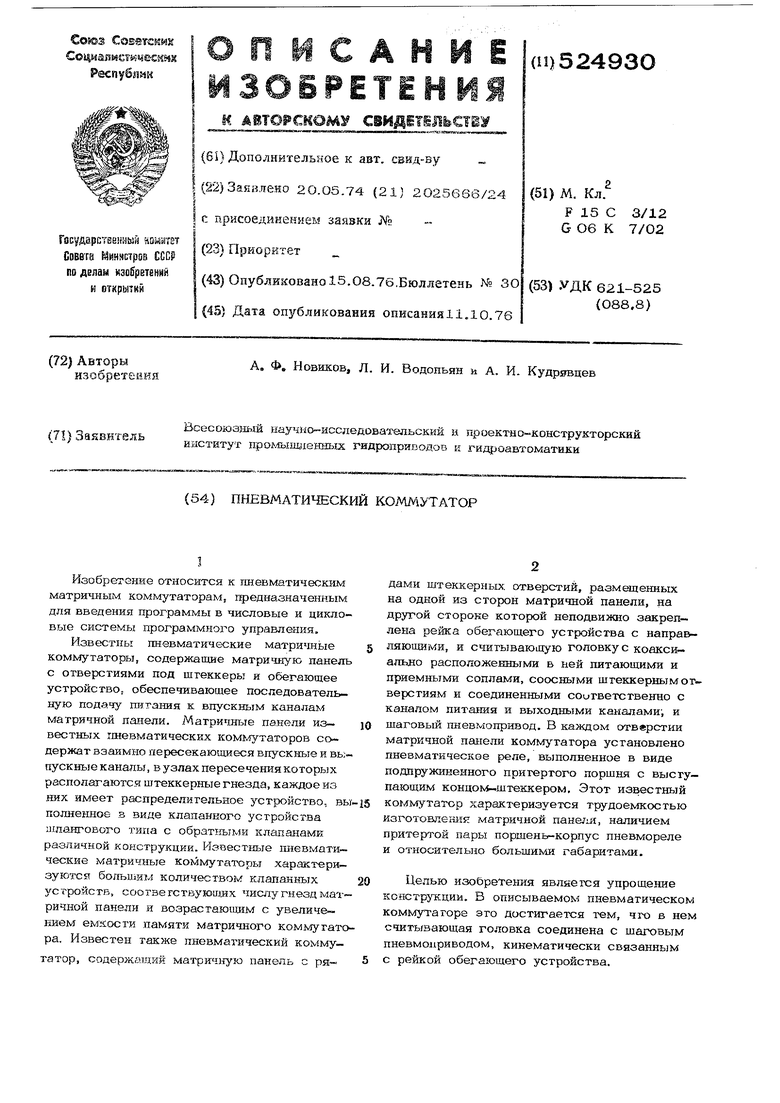
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический матричный коммутатор | 1972 |
|
SU450907A1 |
| Пневматическое программноеуСТРОйСТВО | 1978 |
|
SU807241A1 |
| Многопозиционный воздухораспределитель | 1976 |
|
SU861767A1 |
| Пневмогидравлическое устройство для позиционного управления | 1975 |
|
SU561170A1 |
| Устройство для контроля работы прессового оборудования | 1984 |
|
SU1243005A1 |
| СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВАМИ ДЛЯ ОСУЩЕСТВЛЕНИЯ ТЕХНОЛОГИЧЕСКИХ ОПЕРАЦИЙ | 1981 |
|
RU2020539C1 |
| Устройство для управления автоматической сменой заготовок на токарных станках с числовым программным управлением | 1985 |
|
SU1275374A1 |
| Пневматическое считывающее устройство | 1977 |
|
SU634309A1 |
| Многопозиционный пневмопривод | 1980 |
|
SU877158A1 |
| Пневматический командоаппарат | 1975 |
|
SU572765A1 |