Изобретение относится к техничесКИМ средствам пневмоавтоматики и предназначено для программного управления автоматами г в частности, роботами промышленного назначения. Известные пневматические цикловые программные устройства содержат командоаппарат, дешифраторы и логические блоки. Программа задается перфокартой, перфолентой, дисками, барабаном или различными механическими переключателями l. Наиболее близким по технической сущности к предлагаемому изобретению является пневматическое программное устройство, содержащее-блок распределения команд, выходы которого связаны с горизрнтальньми каналами матричного дешифратора, запоминающие ячейки и элементы установки программы . . Недостатками известных устройств является их сложность, так как требуется два блока распределения команд - обегающих устройства (горизонтальное и вертикальное) и сложны дешифратор с логическими элементами И 3 каждом перекрестье горизонтал ных и вертикальных каналов его матр цы. Вместе с тем оно к тому же TJpeбует соединенное дополнительными пневматическими каналами с выходом каждого элемента И матричное поле набора программы в виде штеккерной панели, которую необходимо коммутировать гибкими пневмошлангами, что снижает надежность устройства. Цель изобретения - упрощение и повышение его надежности. Поставленная цель достигается . тем, что в нем вертикальные каналы матричного дешифратора соединены с входами запоминающих ячеек, а в пересечениях вертикальных и гори-. зонтальных каналов матричного диинфратора установлены передающие элементы, состоящие из двух полостей, Разделенных мембраной, в одной из которых, соединенной с горизонталь ным каналом матричного дешифратора, ус- ановлеи неподвижный упор, а в другой, соедине..ной с вертикальньм каналом матричного дешифратора, установлен подвижный упор, укрепленный яг подвижной перегородке, причем внешняя часть подвижного упора расположена против выполненного в передающем элементе паза для размещения элемента установки программы.
На фиг. 1 изображена блок-схема, в которой установлено предлагаемое устройство; на фиг. 2 - схема предлагаемого устройства; на фиг. 3 работа передающего элемента устройства; на фиг. 4 - матричный дешифратор. .
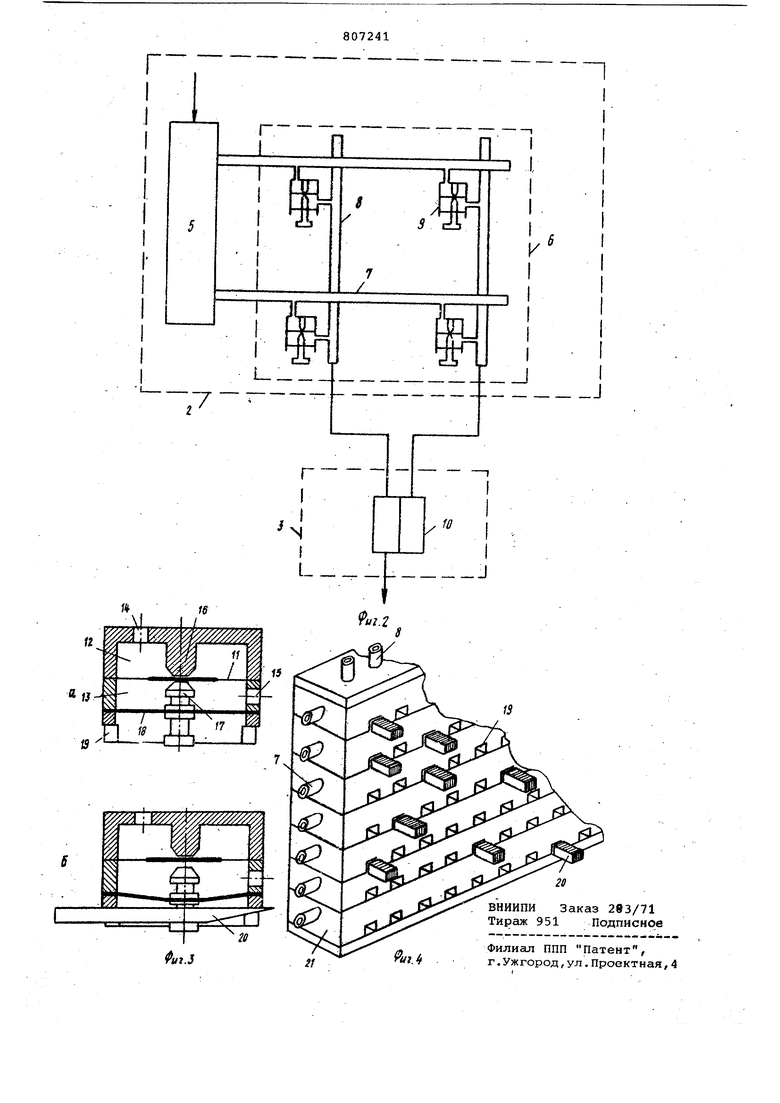
Блок-схема состоит из блока 1 логических условий, блока 2 распределения команд с матричным дешифратором и блока 3 выходов-запоминаквдих ячеек, связанных с блоком 4 исполнительных механизмов. Блок распределения команд предложенного пневматического программного устройства выпонен в ВИД9 одного горизонтального обегающего устройства 5 и матричного дешифратора 6, горизонтальные и вертикальные каналы 7 и 8 которого связаны в перекрестьях через программируемые передакхцие элементы 9. Вертикальные каналы 8 (столбцы) соединены со входами запоминающих ячеек 10 блока 3 выходов. Каждый программируемый передающий элемент 9 выполн(;н в виде камеры, разделенной мембраной 11 на две почости 12 и 13, первая из которь1 4 соединена входным отверстием 14 с горизонтальным каналом 7, а вторая - выходным отверстием 15 с вертикальным каналом 8. В полйсти 12 установлен неподвижный упор
16,а в полости 13 - подвижный упор
17,укрепленный .на упругой разделительной перегородке 18, Внешняя част подвижного упора 17 расположена против паза 19, в котором размещается элемент формирования программы (например клин) 20.
Матричный .дешифратор б может быть выполнен в виде набора многослойных пластин 21, каждая из которых составляет строку матрицы и содержит общие для программируемых передающих элементов 9- каждой строки мембрану 1 и упругую разделительную перегородку 18,
Устройство работает Следующим . образом.
Обегающее устройство 5 (фиг. 2) по командам от блока 1 логических ус.повий подает пневматический импульс (или потенциальный сигнал) поочередно в горизонтальные каналы 7 д ифратора б. Из каждого горизонтая1 вого канала 7 пневматический импульс параллельно попадает сразу во все программируемые переда ощие элементы 9 этой строки. В тех перекрестьях этой строки, где элементы 9 запрограммированы введенными в них элементами (клиньями) 20, пневматический импульс передается в вертикальные каналы 8. Импульсы, поступившие в эти в.ертикальные каналы 8, могут направляться, не влияя на соседние столбцы и строки только ко входам запоминающих ячеек 10 блока 3 выходов, которые включают и выключают исполнительные механизмы блока 4.
Таким образом, разрешение на передачу импульса в заданном перекрестье матрицы в сторону от горизонтальной строки к вертикальному столбцу задается установкой в соответствукидем передающем элементе клина 20, При том передающие элементы 9 сохраняют способность не пропускать пневматический импульс в обратном направлении от столбца к строке. Так програг.1мируемый передающий элемент 9 (фиг. За) не передает пневматический импульс ни от камеры 12 к камере 13, т,е, от горизонтального канала 7 .к вертикальному каналу 8, ни наоборот (от камеры 13 к камере 12) так как мембрана 11 зажата с двух сторон меисду неподвижным упором 16 и подвижным упором 17. Однако тот же элемент 9 с вставленным элементом 20 в виде клина (фиг. Зб) уже .может передать пневматический импульс, но только в одну сторону (от камеры 12 к камере 13),. так как клином 20 отведен от мембраны 11 подвижный упор 17, укрепленный на упругой разделительной перегородке 18, и мембрана 11 под действием пневматического импульса вполости 12 прогибается, создавая пневматический импульс в полости 13. В обратную же сторону (от камеры 13 к камере 12) ячейка 9 не может передать пневматический импульс и в этом случае так как перемещению мембраны 11 в эту сторону препятствует неподвижный упор 16.
При этом можно обойтись без штеккериого наборного поля, исключить вертикальное обегающее устройство, заменить логические элементы И на более простые передающие ячейки и в несколько раз уменьшить количество каналов в матрице дешифратора (за счет ликвидации каналов от выходов элементов И в каждом перекрестье матрицы к матричному полю набора программы) .
Предлагаемое изобретение позволило значительно упростить пневматическое программное устройство, повысить его надежность, упростить набОр программы и расширить его функциональные возможности, позволив ему распределять команды в строке параллельно. Устройство хорошо приспособлено для управления роботами промышленного назначения и может для этих задач найти широкое применение в тех случах, где применение электроники по производственным условиям противопоказано.
Формула изобретения
Пневматическое программное устройство/ содержащее блок распределения
команд, выходы которого связаны с горизонтальными каналами матричного дешифратора, запоминающие ячейки и элементы установки программы, отличающееся тем, что, с целью упрощения и повышения надежности устройства, в нем вертикальные каналы матричного дешифратора соединены с входами запоминающих ячеек, а в пересечениях вертикальных и горизонтальных каналов матричного дешифратора установлены переданвдие элементы, состоящие из двух полостей, разделенных мембраной, в одной из которых, соединенной с горизонтальньвч каналом матричного дешифратора установлен неподвижный упор, а в другой.
соединенной с вертикальньм каналом матричного дешифратора, установлен . подвижный упор, укрепленный на по- движной перегородке, гричем внешняя часть подвижного уПора распело- жена против выполненного 6 передающем элементе паза для размещения элемента установки программы.
Источники информации, принятые во внимание при экспертизе
1.Беренус Т. К. и др. Элементы и схемы пневмоавтоматики. Машиностроение, 1968, с.208-210,
2.Белянин П. Н. Промыоленные роботы. Машиностроение, 1975, с.215-227 (прототип)..
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВВОДА СИГНАЛОВ КОМАНДНОЙ МАТРИЦЫ | 2011 |
|
RU2487393C1 |
| Распределенная система для программного управления технологическими процессами | 1990 |
|
SU1797096A1 |
| Распределенная система для программного управления технологическими процессами | 1988 |
|
SU1605212A1 |
| РАСПРЕДЕЛЕННАЯ СИСТЕМА ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 2000 |
|
RU2185656C2 |
| РАСПРЕДЕЛИТЕЛЬНАЯ СИСТЕМА ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1997 |
|
RU2122229C1 |
| Матричный коммутатор | 1988 |
|
SU1596342A1 |
| РАСПРЕДЕЛЕННАЯ СИСТЕМА ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1998 |
|
RU2133054C1 |
| Пневматический матричный коммутатор | 1972 |
|
SU450907A1 |
| Формирователь матричных команд | 2018 |
|
RU2707913C1 |
| УСТРОЙСТВО ДЛЯ ЗАПИСИ И ОТОБРАЖЕНИЯ ИНФОРМАЦИИ | 1992 |
|
RU2101781C1 |