11
Изобретение относится к автоматическому управлению и может быть использовано при построении электромеханических следящих систем.
Целью изобретения является Ловы- шение точности работы следующей системы .
На чертеже представлена структурная схема следящей системы. При этом приняты следующие обозначения: Q-i - входной угол; 00 - выходной угол; и@ - напряжение на выходе усилителя; Ujj - напряжение на выходе интегратора; - напряжениие на выходе та- хогенератора; tJ - скорость двигате- ля скорость входной оси.
Следящая система содержит, первый сумматор 1, усилитель 2, первый выпрямитель 3, второй сумматор 4, ши- ротно-импульсный модулятор 5, бес- контактньш двигатель постоянного то- ка (ВДПТ) 6, реле реверса БДПТ 7, третий сумматор 8, тахогенератор 9, редуктор 10, интегратор 11, второй выпрямитель 12.
Следящая система работает следующим образом.
При подаче скачкообразного сигнал рассогласования, сигнал, появившийся . на выходе сумматора 1, переводит ре- ле реверса 7 в такое положение, при котором двигатель 6 отрабатывает это рассогласование. Параметры системы выбираются так, что в некоторый момент времени до момента согла- сования осей .Ui реле реверса 7 переключается в обратное состояние и двигатель 6 начинает тормозиться в режиме противовключения. Однако при этом скорость двигателя и) и на- пряжение уменьшаются снова имеет
o 5
0 5
5
87 . 2
место неравенство UQ+UH U(J, реле реверса 7 возвращается в прежнее сое-- . тояние, двигатель скова разгоняется и т.д.
Таким образом, в системе, начиная с момента времени , наблюдается монотонное скользящее движение, при котором .
При подаче на вход системы линейно нарастающего сигнала т.е. скачка скорости .L , также , UQ+ возникает аналогичный скользящий режим, в ходе которого выходная ось, начиная с некоторого момента времени, отслеживает входной угол.
Система построения вышеописанным образом позволяет,повысить динамическую точность системы.
Формула из. обретения
Следящая система, содержащая последовательно соединенные первый сумматор, усилитель, первьй выпрямитель, второй сумматор, щиротно-им- пульсный модулятор, двигатель, редуктор , выход которого соединен с вторым входом первого сумматора, а вход - с входом тахогенератора, выход которого соединен с первым входом третьего сумматора, выход которого через реле реверса соединен с вторым входом двигателя, а второй вход соединен с выходом усилителя и последовательно соединенными интегратором и вторым выпрямителем, отличающая- с я тем, что, с целью повьш1ения точности, выходы интегратора и второго выпрямителя соединены соответственно с третьим входом третьего сумматора и вторым входом второго сумматора.
ft
OJ
Ю
Л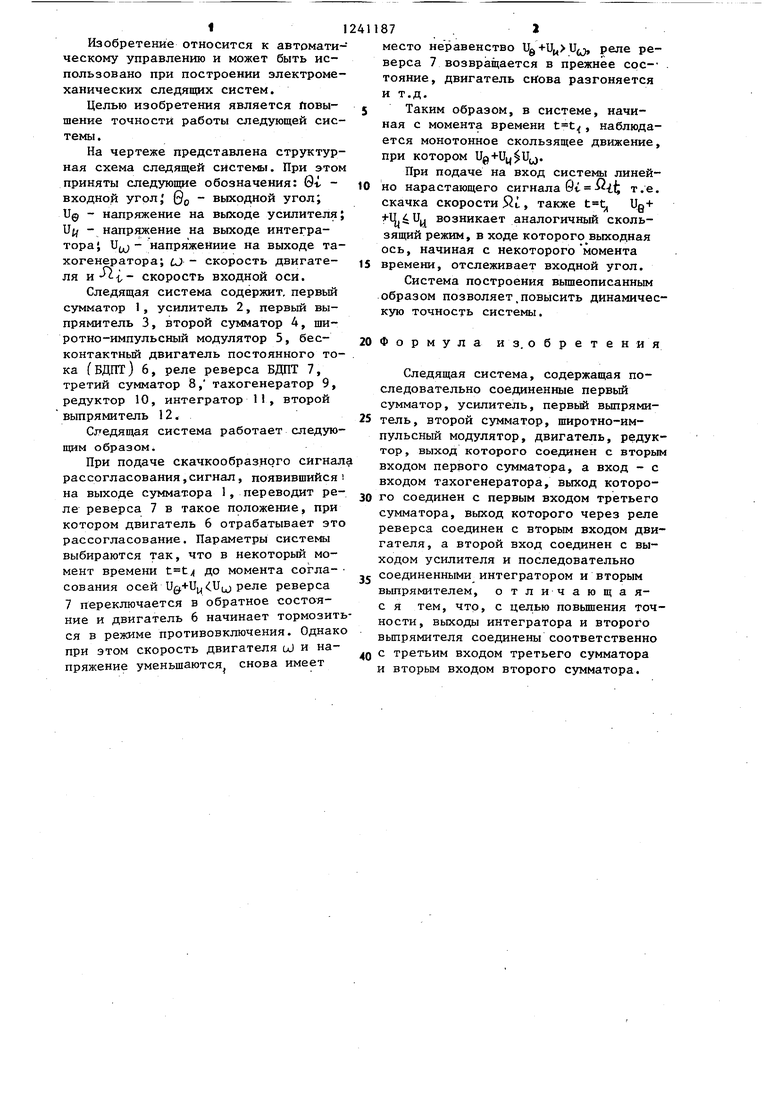
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
| Бесконтактная следящая система постоянного тока | 1975 |
|
SU525925A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Следящая система | 1978 |
|
SU763851A1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| БЕСКОНТАКТНЫЙ СЛЕДЯЩИЙ ПРИВОД ПОСТОЯННОГО ТОКА С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ | 1972 |
|
SU435501A1 |
| Следящая система | 1975 |
|
SU742871A1 |
Изобретение относится к автома- .тическому управле1шю. Целью изобретения является повышение точности. Использование сигнала с выхода интегратора при формировании линии переключения системьг, а также модуля выходиого сигнала интегратора при формировании управляющего воздейст- дия позволяет обеспечить существование скользящего режима в следящей системе и повысить динамическую точ- HofcTb системы. 1 ил.. i (Л 00 
Составитель С.Исаков Редактор М.Бандура Техред Q.Сопко
Заказ 3485/41 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор А. Зимокосов
| Бесконтактный следящий электропривод постоянного тока | 1972 |
|
SU463097A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
