(54) СТЕРЕОТАКСИЧЕСКИЙ АППАРАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Стереотаксический аппарат | 1979 |
|
SU848018A1 |
| Способ наведения стереотаксического инструмента на целевую точку | 1977 |
|
SU745505A1 |
| Стереотаксический аппарат | 1985 |
|
SU1377080A1 |
| Способ наведения стереотаксического инструмента на целевую точку мозга | 1988 |
|
SU1648377A1 |
| Стереотаксический аппарат | 1988 |
|
SU1724198A1 |
| Стереотаксический аппарат | 1980 |
|
SU955916A1 |
| СПОСОБ СТЕРЕОТАКСИЧЕСКОГО НАВЕДЕНИЯ | 1995 |
|
RU2121296C1 |
| СТЕРЕОТАКСИЧЕСКИЙ АППАРАТ | 1973 |
|
SU383450A1 |
| СПОСОБ МАРКИРОВКИ ГОЛОВЫ ПАЦИЕНТА ПРИ РАБОТЕ С ИНТРАОПЕРАЦИОННОЙ БЕЗРАМНОЙ НЕЙРОНАВИГАЦИЕЙ | 2015 |
|
RU2607404C2 |
| Стереотаксический аппарат | 1981 |
|
SU1055503A1 |
1
Изобретение относится к медидине, предназначено для точного подведения к заданной точке головного мозга диагностических электродов и приспособлений для деструкции мозгового вещества и может быть использовано для проведения хирургических вмешательств у больных с гиперкинезами, эпилепсией, болевыми синдромами и опухолями головного мозга.
Обеспечивая достаточно высокую точность введения электродов, известные аппараты ограничивают возможность нейрохирурга в выборе направлений введения диагностических электродов и приспособлений для деструкции мозгового вещества. Последнее особенно заметно при операциях, которые проводятся в один этап без применения фантома и во время которых вводятся многочисленные электродные пучки в различные отделы головного мозга.
Разработан ряд стереотаксических аппаратов, которые совмещают н полярную.и прямоугольную системы координат.
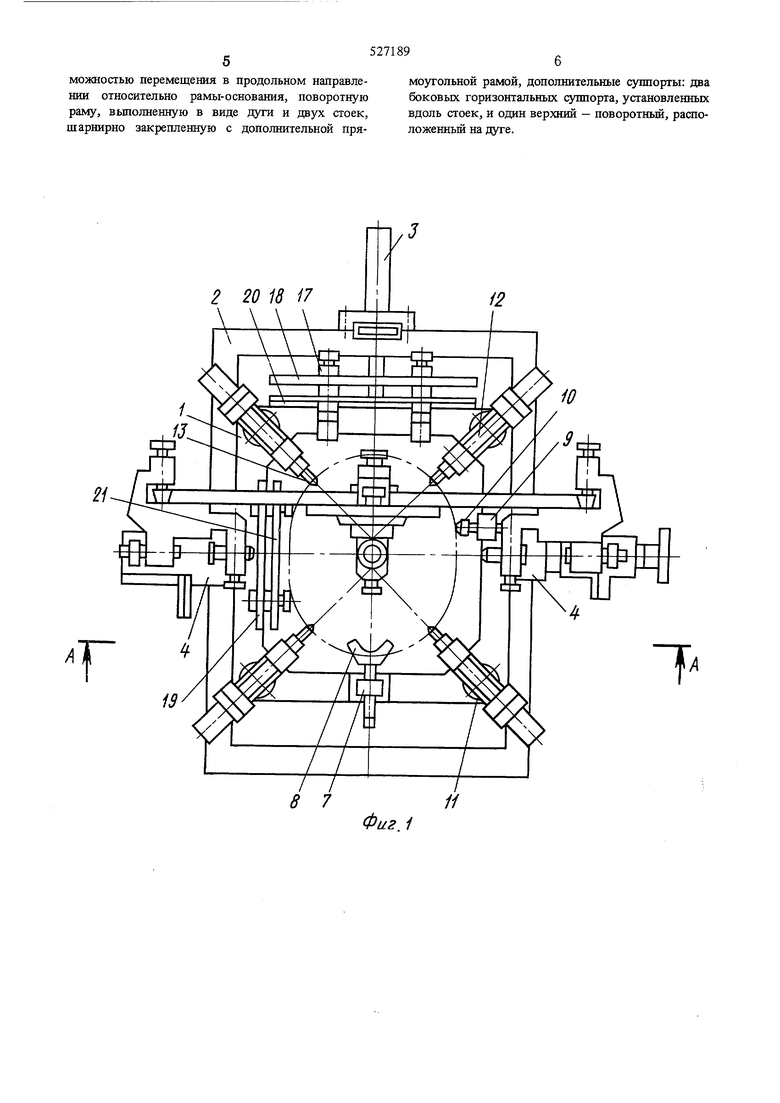
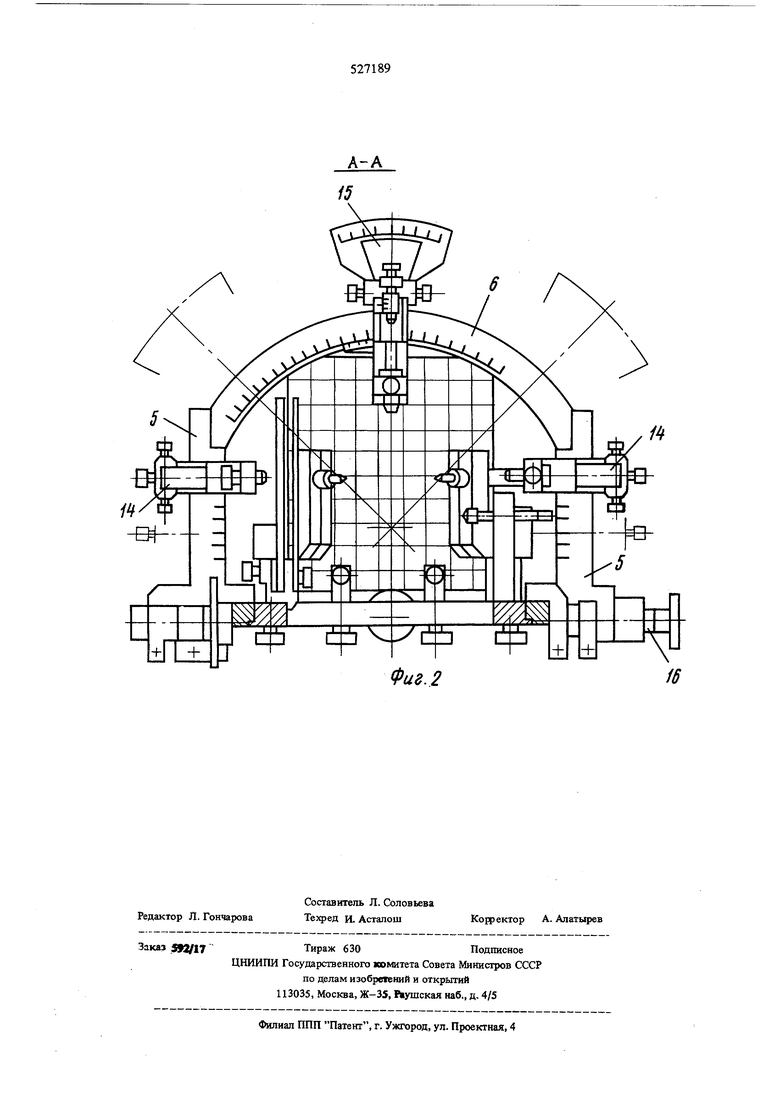
Известен стереотаксический аппарат, содержащий прямоугольную раму - основание, в которой фиксируется голова больного, предварительные и окончательные фиксирующие элементы, раму, несущую сзтшорт и координатные решетки. Рама, несущая суппорт, вьшолнена полукруглой формы и установлена на прямоугольной раме перпенди1сулярно к ее основанию и с возможностью перемещения на ней в продольном направлении. Окончательные фнксируюпдае элементы вьшоЛненыв ввде вращающихся фиксируюпщх винтов и установлены так же, как и предварительные фиксирующие элементы на прямоугольной раме основания с возможностью перемещения по ее полозьям. После жесткой фиксации головы в прямоугольной раме производится рентгенография черепа с использованием прямоугольных координатных решеток, закрепленных снаружи от полукруглой несущей рамы. По данным рентгенограмм прюнзводитсн совмещение координатной системы аппарата с координатной огсгемой мозга и после проведенных расчетов в соответствующем положении на прямоугольной раме - основания установлена полукруглая несущая суппорт рама. Расположенный на полукруглой раме суппорт может изменять свое положение и, таким образом, перемещение его обеспечивает измерения в полярной системе, а перемещение полукруглой рамы на прямоугольном основании обеспечивает измерения в линейной системе координат. Однако жесткая фиксация несущей рамы в перпендикулярном положении к прямоугольному основанию исключает субтенгориапьное и транспозальное введение инструментов в головной мозг и не обеспечивает в случае необходимости изменения угла введения в сагиттальной плоскости. Полукруглая форма несущей рамы и внешнее по отношению к ней расположение координатных решеток существенно затрудняет и снижает точность горизошального введения электродов в височные доли. Целью изобретения является устранение указанных недостатков и повышение эффективности работы аппарата. Достигается это тем, что предлагаемый аппарат имеет дополнительную прямоугольную раму, расположенную ма прямоугольной раме-основании с возможностью перемещения в продольном направлении относительно рамы-оскования, поворотную ра му, вьшолненн ю в виде дуги и двух стоек, шарнирно закрепленн ю с дополнительной прямоугольной рамой, дополнительные с тторты: два боковых горизонталькььч суппорта, установленных вдоль стоек, и О1:щл верхний - поворотньш, расположен1ГЬ1Й ча ,луг:. На фиг. 1 изображен стереотаксический аппарат обцщй вид; на фиг. 2 - разрез по А-А на фиг. 1. Аппарат содер:-. прямоугольную раму - оскование 1. закреп. на голове больного, 1рямоугольную раму 2, опирающуюся на раму осноуаш е 1 и перемещаемую относительно ее в продольном направлении винтовым механизмом 3. С боков рамы 2 закреплены два кроншгейна 4, на которые опирается поворотная рама, зьшо шекная в виде двух стоек 5 и жестко закрепленной дуги 6. На передней стороне рамы-о снования 1 установлена стойка 7 носовой опоры 8, настраивающаяся по высоте в продольном направлении. С боков рамы-основания 1 установлены две стойки 9 с передвижными стержнями 10, проникающ 1ми в наружные слуховые проходы. Стойки 7 и 9 вьшолнены съемными и убираются после жесткой фиксации головы в раме-основании 1. На углах рамы-основания установлены четыре стойки 11 фиксащш, несущие четыре полых винта 12, настраиваемые по высоте относительно рамы-основания 1 и поворачиваемые вокруг осей стоек 11 фиксащ1И с последующей жесткой фиксацией выбраннььч иоложений. Через полые винты 12 специальным сверлом могут быть высверлены каналы в черепе больного для установки игл 13 фиксации, фиксирующих голову больного в аппарате. Две стойки 5 и дуга 6 несут перемещаемые суппорты: два боковых горизонтальных суппорта 14 и один верхний поворотный суппорт 15. Верхний поворотньш суппорт 15, перемещающийся по дуге 6, допускает наклон около оси, расположенной в корпусе су1таорта 15, а также вместе с дугой б, на которой он закреплен, может вращаться вокруг поперечной оси рам 1 и 2. Боковые горизонтальные суппорты 14 и верхний поворотньш сзтшорт 15 вместе со стойками 5 и дугой 6 могут совершать поступательные продольг ные и поперечные перемещения относительно рамы-основания 1 при помощи винтовых механизмов 3 и 16. Струбцинами 17 на раме-основании с височной, затылочной и лобной сторон головы установлены съемные кассеты 18 н 19 с рентгеновскими пленками. Между кассетами 18 и 19 и головой больного установлены координатные решетки 20 и 21 из органического стекла с встроенными в них рентгеноконтрастными координатньпии проволочными сетками с десятимиллиметровыми ячейками. Хирургическое вмещательство при помощи стереотаксического аппарата включает следующие этапы. После предварительного введения рентгеноконтрастного вещества в желудочковую систему головного мозга голову больного предварительно фиксируют в раме-основании 1 при помощи стоек 7 и 9. Затем голову больного жестко фиксируют при помощи полых винтов 12 и игл 13 фиксации, после этого стойки 7 и 9 убирают. Струбцинами 17 устанавливают в прямой и боковой проекциях по отношению к голове больного кассеты 18 и 19 с рентгеновскими пленками и координатными рещетками 20 и 21. На следующем этапе после рентгенографии черепа больного при помощи винтовых механизмов 3 и 16 и изменения угла наклона вертикальных стоек 5 производят окончательное совлющение координатных плоскостей мозга и стереотаксического аппарата. После повторной рентгенографии определяют координаты искомых точек мозга. Эти данные переводят в координатную систему стереотаксического аппарата. После предварительной коррекции положений боковых, горизонтальных или верхнего поворотного суппортов относительно искомых структур, их фиксируют на дуге 6 и стойках 5 и через боковые горизонтальные 14 или верхний поворотный 15 суппорты производят сверление черепа больного н введение в мозг хирургических инструментов или диагностических электродов. Формула изобретения Стереотаксический аппарат, содержащий прямоугольную раму-основание, фиксирующие элементы, установленные на основании, координатные решетки, суппорт, вертикальную раму, несущую суппорт, отличающийся тем, что, с целью возможности введения инструментов под любым углом в головной мозг и повьщгения точности их введения, он имеет дополнительную прямоугольную раму, расположенную на прямоугольной раме-основании с возможностью перемещения в продольном направлении относительно рамы-основания, поворотную раму, выполненную в виде дуги и двух стоек, шарнирно закрепленную с дополнительной пря2 20 18 17
моугольной рамой, дополнительные суппорты: два боковьк горизонтальных суппорта, установленных вдоль стоек, и один верхний - поворотный, расположенньш на дуге.
Фиг 1
