(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1979 |
|
SU891430A2 |
| Манипулятор | 1986 |
|
SU1313688A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2247021C1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов и других грузозахватных устройств.
Известен захват манипулятора, содержащий дифференциальный механизм, кинематически связанный с приводом и с губками..
Недостатком известного .захвата является низкая точность позиционирования губок относительно захватываемого объекта.
Целью изобретения является устранение указанного недостатка.
Цель достигается тем, что захват снабжен по числу губок зубчато-реечными механизмами и силовым цилиндром, в штоке которого расположены упоры, причем рейки зубчато-реечных механизмов расположены напротив упоров, а зубчатые колеса эт1их механизмов жестко связаны каждое с ведушим зубчатым колесом дифференциального механизма.
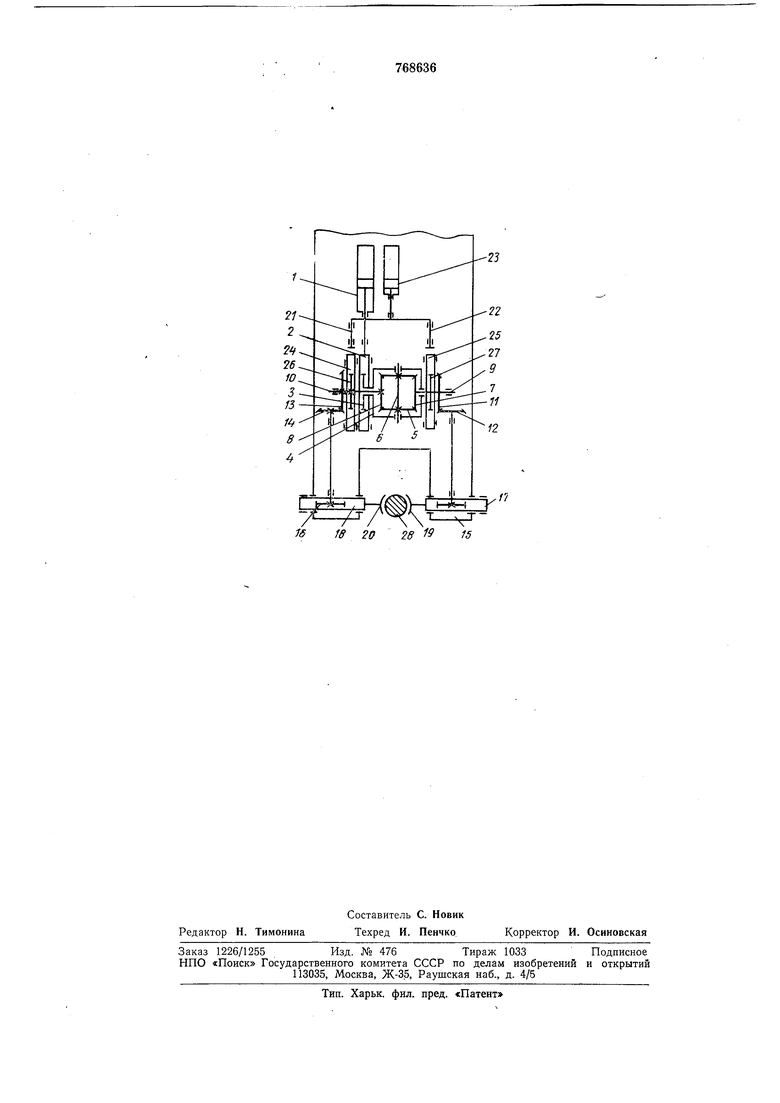
На чертеже дана кинематическая схема захвата манипулятора.
Захват манипулятора состоит из следующих основных элементов: привода 1 со штоком, жестко связанного с рейкой 2. Шестерня 3 жестко связана с водилюм 4 дифференциального механизма, который в свою очередь состоит из коническ1их шестерен 5,
жестко сидящих на валу 6. Шестерни 5 находятся в зацеплении с ведущими зубчатыми колесами 7 и 5 дифференциального механизма (дифференциала). Оба колеса
5 жестко закреплены на валах 9 и W соответственно. На других концах валов 9 и 10 жестко аидят: коническое колесо II, образующее с колесом 12 первую зубчатую пару, и колесо 13, образующее с колесом 14 вторую зубчатую пару. Колеса 12 и 14 свя10заны посредством валов с колесами /5 и 16, зацепляющимися с рейками 17 и 18 соответственно. Каждая рейка жестко связана с губками захвата, рейка 17 - с губкой 19, а
15 рейка 18 - с губкой 20. Для фиксирования хода губок 19 и 20 служат упоры 21 и 22, расположенные на штоке силового цилиндра 23. Захват имеет по числу губок зубчато-реечные механизмы, рейки 24 и 25 которых расположены напротив упоров 21 и 22, а,зубчатые колеса 26 и 27 этих механизмов жестко связаны с ведущими зубчатыми колесами 7 и 5 дифференциального механизма.
Работа захвата происходит следующим
25 образдм.
От привода / поступательное движение передается рейке 2. Далее шестерня 5, жестко связанная с вод1илом 4 дифферен30циала, передает движение вращен/ия через
конические шестерни 5, закрепленные на валу 6, коническим зубчатым колесам 7 и 8, закрепленным на валах 9 и 10. Затем движение передается через зубчатые колеса // и 12 правой ветви и через зубчатые колеса 18 и 14 левой ветви на рейки 17 и 18, т. е. к губкам 19 и 20, жестко связанным с этиМ И рейками. При сближении губок происходит залсим детали 28.
При этом деталь захватывается без смещенйя при .нес;и1М1метрич«Ом ее расположеНИ|И Отнооительно л.родольной оси . Например, если губка 20 захвата вошла в соприкосновение с деталью 28 и при определенном сопротивлении со стороны детали передача движения Л1рекрат1нлась, то по левой кинематической цепи от колеса 8 дифференциала через вал 10, зубчатые колеса 13, 14 и 16 и рейжу 18 водило 4 получит дополнительное движение и оно передается на правую кинематическую цепь: на колесо
7дифференциала, колеса //, 12 и 15 и рейку 17. При этом губка 19 получит дополнительное движение и, соприкасаясь с деталью 28, произведет ее зажим совместно с губкой 20. При зажиме детали, несимметрично расположенной отнюантельно оси захвата, как было указано вал 9 ведущего зубчатого колеса 7 дифференциала с жестко закрепленным на нем колесом 27 получит дополнительное движение, тогда рейка 25 переместится дальше, чем рейка 24, перемещающаяся от колеса 26, жестко сидящего на валу 10 ведущего зубчатото колеса
8дифференциала.
Для установки детали 23 симметрично относительно оси захвата силовым цилиндром 23 выставляются упоры 21 и 22. Поскольку в описанном примере рейка 25 была выставлена дальше, чем рейка 24, она первая соприкоснется с упором 22 и движение передается на -колеср 27, далее на вал
9и по правой кинематической цепи - на
губку 19, которая начнет перемещаться вправо. Одновременно с вала 9, на котором жестко закреплено ведущее зубчатое колесо 7 дифференциала, движение передается через щестерни 5 на второе ведущее зубчатое колесо 8 диффер енциала и далее по левой иинематичеокой депи - к губке 20, которая начнет перемещаться также вправо вместе с губкой 19. Движение
губок будет производиться до тех пор, пока рейка 24, получающая движение от колеса 26, жестко сидящего на валу 10, не соприкоснется с упором 21. Поскольку рейка 25 и рейка 24 стопорятся упорами 22 и 21, произойдет остановка захвата с деталью, при этом ось детали совпадет с продольной осью захвата. После этого упоры 2} и 22 отводятся в исходное положение силовым цилиндром 23. Разжим -губок происходит в обратном порядке, при этом губки самоустанавливаются си мметрично относительно продольной оси захвата.
Формула изобретения
Захват манипулятора, содержащий дифференциальный механизм, кинематически связанный с приводом и с губками, отличающийся тем, что, с целью повышегия точности позиционирования губок, он снабжен по числу губок зубчато-реечными механизмами и силовым цилиндром, на штоке которого расположены упоры, причем рейки зубчато-реечных механизмов расположены напротив упоров, а зубчатые колеса этих механиз(мов связаны каждое с ведущим зубчатым колесом дифференциального механизма.
Источник информации, принятый во
внимание при экспертизе:
1 Авторское свидетельство СССР № 503714, кл. В 25 J 15/00, 08.12.74.
18 20 28 9
IS
23
