Изобретение относится к обработке металлов давлением в частности деталей типа балок и коленчатых валов для автомобильной и тракторной промышленности.
Целью изобретения является повышение точности позиционирования захватного органа. .. , .
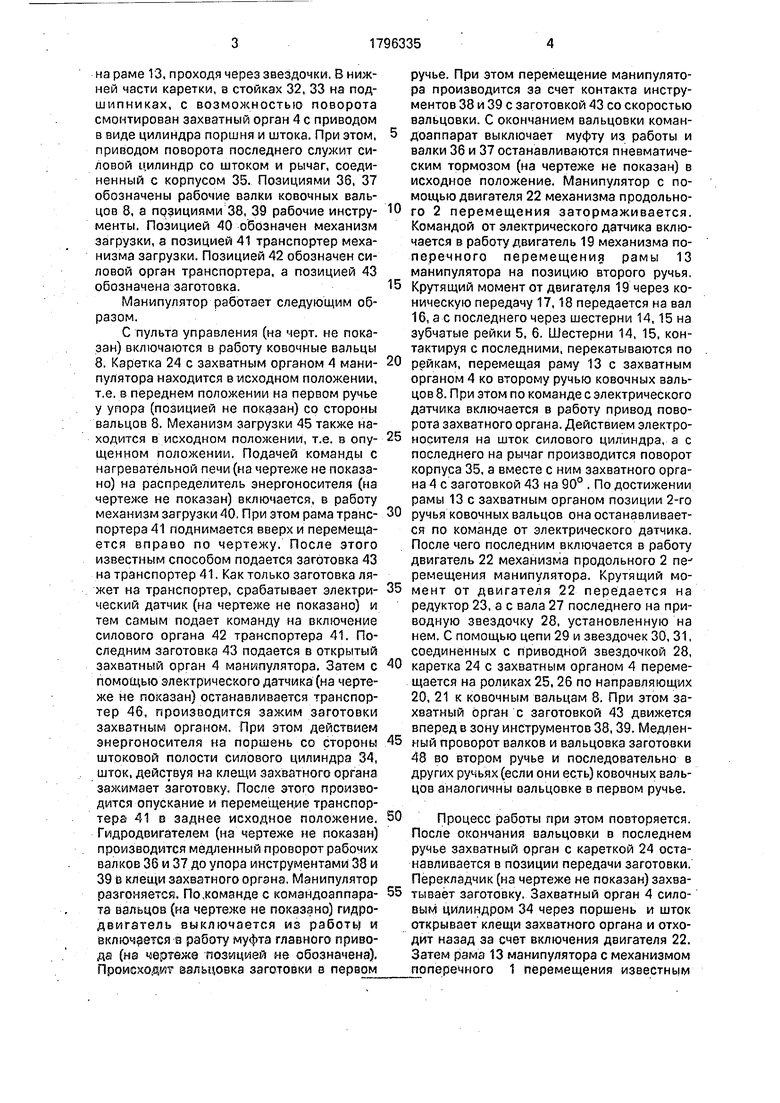
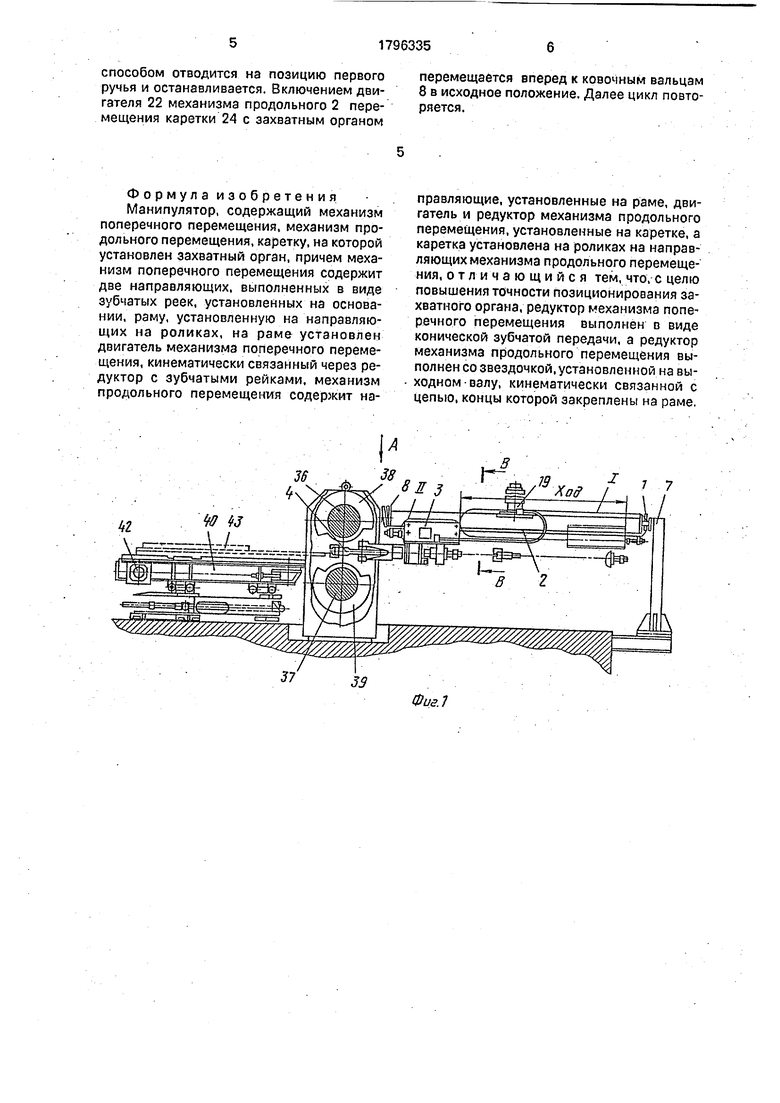
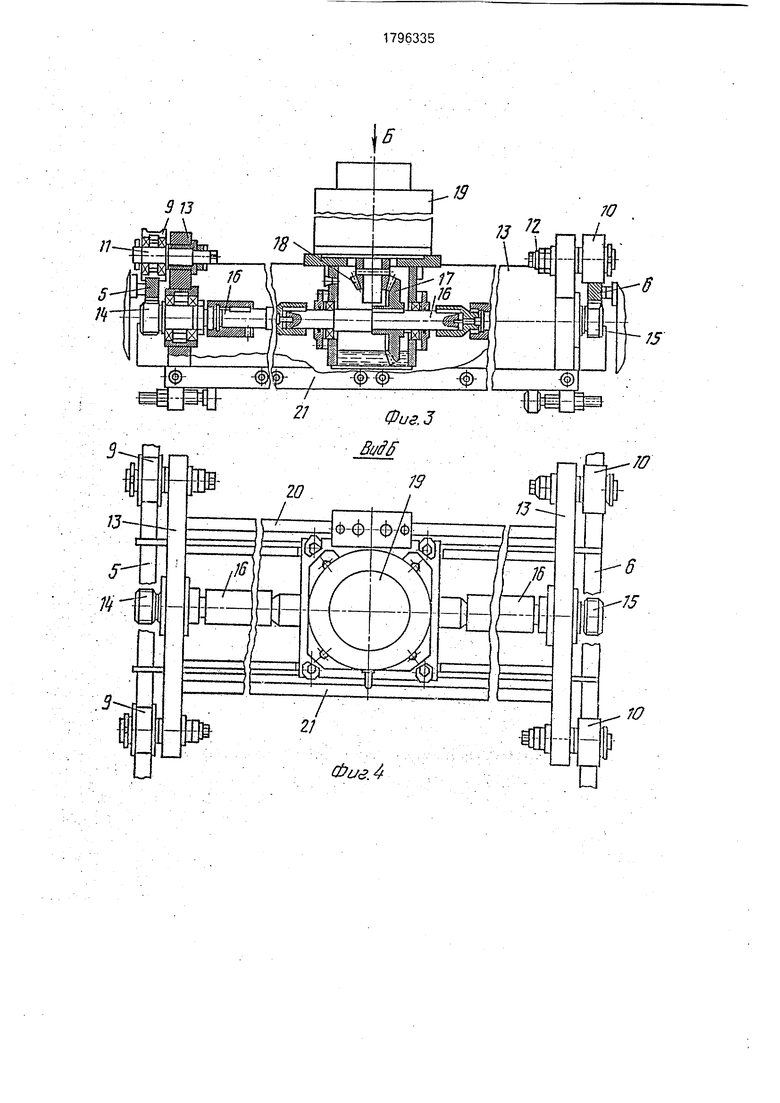
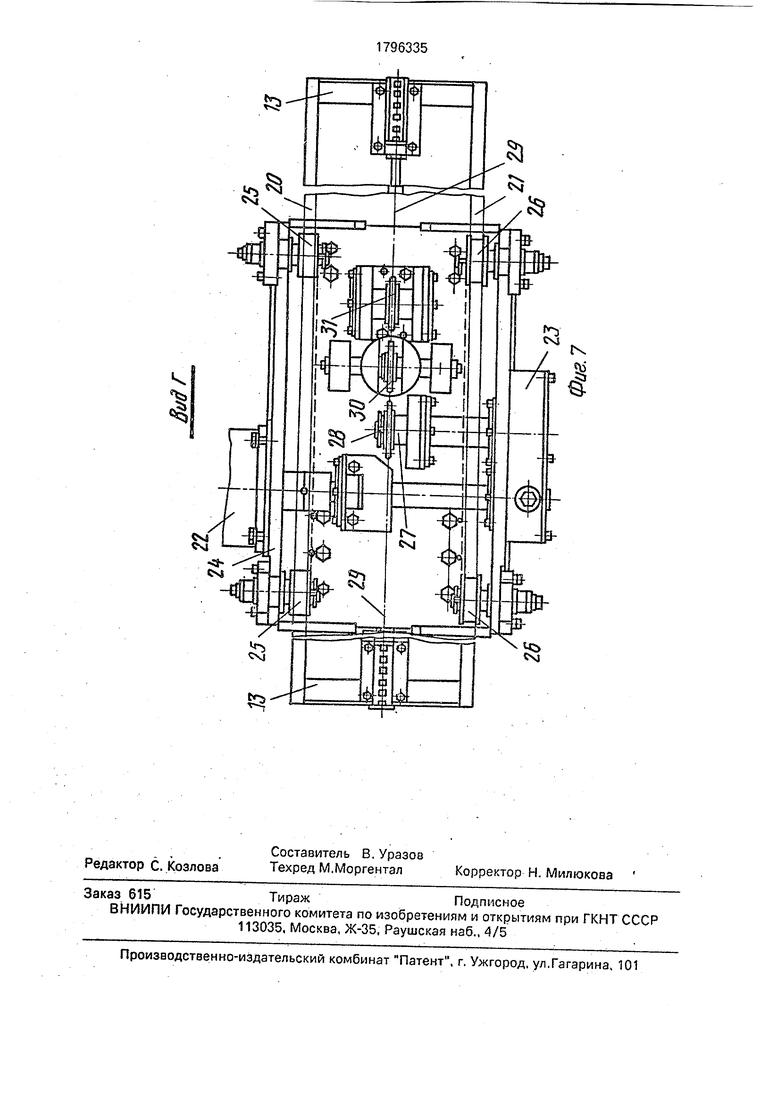
Из фиг.1 показан общий вид манипулятора с частичным разрезом; на фиг.2 - вид А на фиг.1; на фиг.З - узел I на фиг.1 с частичным разрезом; на фиг.4 - вид Б на фиг.З; на фиг.5 - сечение В-В на фиг.1; на фиг.6 - узел И на фиг.1; на фиг.7 - вид Г на фиг.6.
Манипулятор содержит механизм поперечного 1 перемещения, механизм продольного 2 перемещения, каретку 3 с захватным органом 4. Механизм поперечного 1 перемещения включает направляющие 5, 6, выполненные в виде зубчатых реек,
установленные с одной стороны на основании 7, а с другой стороны на основании ковочных вальцов 8. .Верхние поверхности направляющих 5, 6 контактируют с роликами 9,10. установленных на осях 11,12 рамы 13, а нижние - рейки связаны с шестернями 14,15 вала 16, установленного в опорах (поз. не обозначены) рамы 13. Вал 16 в средней части снабжен зубчатым колесом 17 связанным с шестерней 18 двигателя 19, установленного на раме 13. Механизм продольного 2 перемещения, в свою очередь, включает направляющие 20,21, установленные на раме 13, двигатель 22 и редуктор 23, установленные на каретке 24. Каретка 24, в свою очередь, установлена на роликах 25, 26 на направляющих 20, 21 механизма продольного перемещения. На выходном валу 27 редуктора 23 установлена звездочка 28, соединенная с помощью цепи 29 закреплены
4 Ю О СО СО СЛ
на раме 13, проходя через звездочки, В нижней части каретки, в стойках 32, 33 на подшипниках, с возможностью поворота смонтирован захватный орган 4 с приводом в виде цилиндра поршня и штока. При этом, приводом поворота последнего служит силовой цилиндр со штоком и рычаг, соединенный с корпусом 35. Позициями 36, 37 обозначены рабочие валки ковочных вальцов 8, а позициями 38, 39 рабочие инструменты. Позицией 40 обозначен механизм загрузки, а позицией 41 транспортер механизма загрузки. Позицией 42 обозначен силовой орган транспортера, а позицией 43 обозначена заготовка.
Манипулятор работает следующим образом.
С пульта управления (на черт, не показан) включаются в работу ковочные вальцы 8. Каретка 24 с захватным органом 4 манипулятора находится в исходном положении, т.е. в переднем положении на первом ручье у упора (позицией не показан) со стороны вальцов 8. Механизм загрузки 45 также находится в исходном положении, т.е. в опущенном положении. Подачей команды с нагревательной печи (на чертеже не показано) на распределитель энергоносителя (на чертеже не показан) включается, в работу механизм загрузки 40. При этом рама транспортера 41 поднимается вверх и перемещается вправо по чертежу. После этого известным способом подается заготовка 43 на транспортер 41. Как только заготовка ляжет на транспортер, срабатывает электрический датчик (на чертеже не показано) и тем самым подает команду на включение силового органа 42 транспортера 41. Последним заготовка 43 подается в открытый захватный орган 4 манипулятора. Затем с помощью электрического датчика (на чертеже не показан) останавливается транспортер 46, производится зажим заготовки захватным органом. При этом действием энергоносителя на поршень со стороны штоковой полости силового цилиндра 34, шток, действуя на клещи захватного органа зажимает заготовку. После этого производится опускание и перемещение транспортера 41 в заднее исходное положение. Гидродвигателем (на чертеже не показан) производится медленный проворот рабочих валков 36 и 37 до упора инструментами 38 и 39 в клещи захватного органа, Манипулятор разгоняется. Подкоманде с командоаппара- та вальцов (на чертеже не показано) гидродвигатель выключается из работу и включается в работу муфта главного привода (на чертеже позицией не обозначена). Происходит зальцовка заготовки в первом
ручье. При этом перемещение манипулятора производится за счет контакта инструментов 38 и 39 с заготовкой 43 со скоростью вальцовки. С окончанием вальцовки командоаппарат выключает муфту из работы и валки 36 и 37 останавливаются пневматическим тормозом (на чертеже не показан) в исходное положение. Манипулятор с помощью двигателя 22 механизма продольного 2 перемещения затормаживается. Командой от электрического датчика включается в работу двигатель 19 механизма поперечного перемещения рамы 13 манипулятора на позицию второго ручья.
Крутящий момент от двигателя 19 через коническую передачу 17,18 передается на вал 16, ас последнего через шестерни 14,15 на зубчатые рейки 5, 6. Шестерни 14, 15, контактируя с последними, перекатываются по
рейкам, перемещая раму 13 с захватным органом 4 ко второму ручью ковочных вальцов 8. При этом по команде с электрического датчика включается в работу привод поворота захватного органа. Действием электроносителя на шток силового цилиндра, а с последнего на рычаг производится поворот корпуса 35, а вместе с ним захватного органа 4 с заготовкой 43 на 90° .По достижении рамы 13 с захватным органом позиции 2-го
ручья ковочных вальцов она останавливается по команде от электрического датчика. После чего последним включается в работу двигатель 22 механизма продольного 2 nej ремещения манипулятора. Крутящий момент от двигателя 22 передается на редуктор 23, а с вала 27 последнего на приводную звездочку 28, установленную на нем. С помощью цепи 29 и звездочек 30, 31, соединенных с приводной звездочкой 28,
каретка 24 с захватным органом 4 перемещается на роликах 25, 26 по направляющих 20, 21 к ковочным вальцам 8. При этом захватный орган с заготовкой 43 движется вперед в зону инструментов 38,39. Медленный проворот валков и вальцовка заготовки 48 во втором ручье и последовательно в других ручьях (если они есть) ковочных вальцов аналогичны вальцовке в первом ручье.
Процесс работы при этом повторяется. После окончания вальцовки в последнем ручье захватный орган с кареткой 24 останавливается в позиции передачи заготовки. Перекладчик (на чертеже не показан) захватываёт заготовку. Захватный орган 4 силовым цилиндром 34 через поршень и шток открывает клещи захватного органа и отходит назад за счет включения двигателя 22. Затем рама 13 манипулятора с механизмом поперечного 1 перемещения известным
способом отводится на позицию первого ручья и останавливается. Включением двигателя 22 механизма продольного 2 перемещения каретки 24 с захватным органом
перемещается вперед к ковочным вальцам 8 в исходное положение. Далее цикл повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор ковочных вальцов | 1980 |
|
SU871956A1 |
| Манипулятор ковочных вальцов | 1980 |
|
SU935189A1 |
| Манипулятор ковочных вальцов | 1990 |
|
SU1756012A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Манипулятор ковочных вальцов | 1977 |
|
SU698712A1 |
| Привод продольного и поперечного перемещения клещей ковочных вальцов | 1986 |
|
SU1430163A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ГОРЯЧЕЙ ШТАМПОВКИ КРУПНЫХ ПОКОВОК С ВЫТЯНУТОЙ ОСЬЮ | 2003 |
|
RU2262436C2 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Автоматизированная линия горячей штамповки крупных поковок с вытянутой осью | 1991 |
|
SU1822353A3 |
| Автоматические ковочные вальцы | 1974 |
|
SU541551A1 |

Изобретение относится к обработке металлов давлением, в частности деталей типа коленчатых валов для автомобильной и тракторной промышленности. Суи.1ность изобретения манипулятор содержит механизмы продольного и поперечного перемещения, выполненные в виде направляющих, двигателя и редуктора. Редуктор механизма поперечного перемещения выполнен в виде конической зубчатой передачи, а редуктор механизма продольного перемещения содержит звездочку, установленную на выходном валу и кинематически связанную с цепью, концы которой закреплены на раме механизма поперечного перемещения, что позволяет повысить точность позиционирования захватного органа манипулятора,. 7 ил..
Формула изобретения Манипулятор, содержащий механизм поперечного перемещения, механизм продольного перемещения, каретку, на которой установлен захватный орган, причем механизм поперечного перемещения содержит две направляющих, выполненных в виде зубчатых реек, установленных на основании, раму, установленную на направляющих на роликах, на раме установлен двигатель механизма поперечного перемещения, кинематически связанный через редуктор с зубчатыми рейками, механизм продольного перемещения содержит направляющие, установленные на раме, двигатель и редуктор механизма продольного перемещения, установленные на каретке, а каретка установлена на роликах на направляющих механизма продольного перемещения, отличающийся тем, что, с целю повышения точности позиционирования захватного органа, редуктор механизма поперечного перемещения выполнен о виде конической зубчатой передачи, а редуктор механизма продольного перемещения выполнен со звездочкой, установленной на вы- ходном-валу, кинематически связанной с цепью, концы которой закреплены на раме.
&Ј/&$
| Козырев Ю.Г | |||
| Промышленные роботы | |||
| Справочник | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и до- пол | |||
| - М.: Машиностроение, 1988, с | |||
| Способ получения нерастворимых лаков основных красителей в субстанции и на волокнах | 1923 |
|
SU132A1 |
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
