(54) МЕХАНИЗМ ФИКСАЦИИ ШПИНДЕЛЬНОГО БАРАБАНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для нарезания объемного орнамента на плоской рейке | 1981 |
|
SU1076324A2 |
| МНОГОШПИНДЕЛЬНЫЙ ТОКАРНЫЙ АВТОМАТ С ПОВОРОТНЫМ ШПИНДЕЛЬНЫМ БАРАБАНОМ | 1968 |
|
SU212709A1 |
| Многошпиндельный токарный станок | 1982 |
|
SU1136890A1 |
| Механизм фиксации шпиндельного блока токарного многошпиндельного автомата | 1984 |
|
SU1196147A1 |
| Гидропривод для возвратно-поступательного перемещения рабочего органа | 1982 |
|
SU1106926A1 |
| Шпиндельная бабка пруткового автомата | 1971 |
|
SU405261A1 |
| Многошпиндельный токарный автомат | 1979 |
|
SU804213A1 |
| СТАНОК ДЛЯ НАРЕЗКИ СПИРАЛЬНОЙ КАНАВКИ | 1972 |
|
SU341635A1 |
| Автомат для намотки перфорированной пленки и упаковки в бумагу | 1975 |
|
SU561699A1 |
| Токарный многошпиндельный станок | 1978 |
|
SU780963A1 |
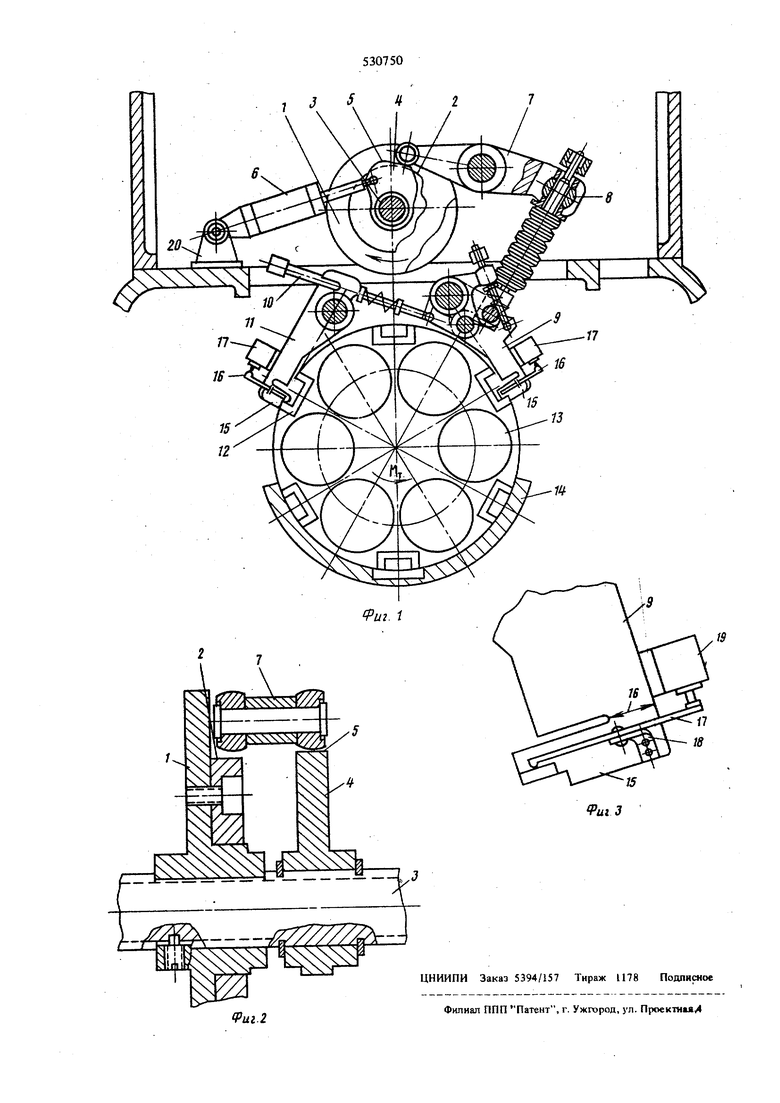
Изобретение относится к станкостроению, в частI кости к механизмам фиксации шпиндельного барабана горизонтального многошпиндельного токарного автомата, и может быть использовано для фиксации поворотных узлов в станках. Известен механизм фиксашш шпиндельного бараi бана, содержащий установленный на распределительном валу кулачок с рабочим профилем по дуге окруж ности, с которым взаимодействует качающийся рычаг, связанный тягами с запирающим и ф1пссирующ1ич рычагами. С целью повышения точности фиксадии предлагаемый механизм снабжен дополнительным кулачком с плавно поднимающейся кривой, закрепленным на распределительном валу соосно с основным кулачком и с возможностью вращения от отдельного реверсивного привода, например от гидроцилиндра, установленного на корпусе с возможностью качания, при этом качающийся рычаг снабжен дополш.гельным участком, взаимодействующим с кулачком с плавно поднимающейся кривой, а для реверса и останова привода последнего на фиксирующем и запирающем рычагах установлены динамометрические устройства. На фиг. показан предлагаемый механизм фиксации; на фиг. 2 - распределительный вал, приводной и секторный кулачки; на фиг. 3 - динамометрическое устройство. Механизм фиксации шпиндельного барабана состоит (см. фиг. 1 и 2) из приводного кулачка I с радиусной кривой 2, жестко закрепленного на распределительном валу 3, и секторного кулачка 4 с плавно поднимающейся кривой 5, вращающегося от гидроцилиндра 6,попеременно взаимодействующих с качающимся рычагом 7, от которого через тягу 8 приводятся в действие запирающий рычаг 9 и далее через тягу 10 фиксирующий рычаг 11,которые,взаимодействуя с фиксирующими замками 12 шпиндельного барабана 13, осуществляют фиксацию и приншм его к ложу 14. Как запирающий рычаг 9, так и фиксирующий рычаг 11 вьшолнены с динамометрическими устройствами (см. фиг. 1 и 3), состоящими из тарированного по усилию упругого элемента 15, вьтопненного за счет утонения 16 конца фиксирующего 11 и запирающего 9 рычагов, и рьиага 17 с беззазорным inapimpoM в виде изогнутой дружины 18, передающего деформацию упругого элемента 15 на датчик 19.
Динамометрические устройства запирающего 9 и фиксирующего 11 ручагов контролируют силы, действующие в этих рычагах при фиксации шпикдельного барабана 13, и управляют работой гидроцилиндра 6, шарнирно закрепленного на корпусе 20.
Механизм фиксации шпиндельного барабана работает следующим образом.
Подвод и отвод фиксирующего 11 и запирающ го 9 рычагов осуществляются от приводного кулачка 1, а фиксация и расфиксация цшиндельного барабана 13 - от секторногокулачка 4,Положение механизма фиксации, показанное начертежа, соответствует положению подвижных элементов по окончании фиксации Тппиндельного барабана 13. После деления пшиндельного барабана 13 приводной кулачок 1, вращающийся с распределитель ш валом 3 в направлении по часовЬй стрелке (на фиг. 1 стрелкаУ), воздействует на качающийся рычаг 7 от которого запирающий 9 и фиксирующий 11 рычаги вводятся в фиксирующие замки 12 щпиндельного барабана 13. Далее запирающий рьиаг9 осуществляет обратный доворот щпиндельного барабана 13 до упора фиксирующего замка 12 в фиксирующий рычаг 11.
Одновременно от командоаппарата (не показав) много шпиндельного автомата подключается гадроцилиндр 6, которьш поворачивает секторный кулачок 4, вводя его в контакт с правым роликом (см. фиг. 2) качающегося рычага 7. При этом качающийся рычаг 7 поднимается и его левый ролик выходит из контакта с приводным кулачком 1. Дальнейщая фиксация шпиндельного барабана 13с постепенным повышением усилия на фиксирующем рычаге 11 осуществляется только от секторного кулачка 4благодаря его плавно поднимающейся кривой 5.
По достижении заданного усилия на фиксирующем рычаге 11 датчик 19 дает команду на реверс гидроцилиндра 6 и секторный кулачок 4 поворачивается в обратную сторону. Усилие на запирающем
рычаге 9, поднявщееся выше, чем на фиксирующем рьмаге 11 на величину момента М от сял трения шпиндельного барабана 13 о ложе 14, снижается до величины усилия на фиксирующем рычаге 11. Датчик 19 запирающего рычага 9 дает команду на останов гидроцилиндра 6. Этим достигается стабильность силы на фиксирующем рычаге 11 и уравнивание сил на фиксирующем 11 и запирающем 9 рычагах, что обеспечивает высокую точность фиксации положения шпиндельного барабана 13.
По окончании обработки от командоаппарата мног-оплшндельного автомата подключается гидроцилиндр 6, который вьшодит секторный кулачок 4 из контакта с роликом качающегося рычага 7.
f-t
При этом качающийся рычаг 7 опускается до
контакта ,левого ролика с приводным кулачком 1 и дальнейшая расфиксация и отвод запирающего 9 и фиксирующего 11 рычагов от фиксирующих замков 12 щпиндельного барабана 13 осуществляется от приводного кулачка 1.
Формула изобретения
Механизм фиксации щпиндельного барабана, содер жашлй установленный на распределительном валу кулачок с рабочим профилем по дуге окружности, с которым взаимодействует качающийся рычаг, связанный тягами с запирающим и фиксирующим рьригами, отличающийся тем, что, с целью повыщения точности фиксации, он снабжен дополнительным кулачком с плавно поднимающейся кривой, закрепленным на распределительном валу соосно с основным кулачком и с возможностью вращения от отдельного реверсивного привода, например от гидроцилиндра, установленного на корпусе с возможностью качания, при этом качающийся рычаг снабжен дополнительным участком, взаимодействующим с кулачком с плавно поднимающейся кривой, а для реверса и останова привода последнего на фиксирующем и запирающем рычагах установлены динамометрические устройства.
