1
Изобретение относится к устройствам для управления подъемником, в частности к адресным устройствам.
Известен адресователь грузов мачтового подъемника, содержащий расположенный на грузовой каретке датчик, взаимодействующий со смонтированными вдоль мачты подъ емника управляемыми путевыми упорами. Датчик пропускает упоры, находящиеся в нейтральном положении и дает импульс при прохождении выдвинутых упоров. Адресование вьшолняет рабочий, принимающий груз.
Однако такой ащэесователь неудобен так как выдвинутый упор должен быть убран рабочим, находящимся на соответствующем этаже, в противном случае, грузовая каретка не сможет подняться выще, чем этаж у которого находится упор, случайно выдвинутый или находящийся в выдвинутом положении, например, по недосмотру или невнимательности рабочих, принявших груз. Это затрудняет применение адресователя, может вызвать неоправданные остановки в работе и снижает производительность подъемника.
Цель изобретения - автоматизация управления упорами.
Для этого адресователь снабжен установленным на каретке кулачком, воздействующим на упоры, которые подпружинены относительно мачты подъемника.
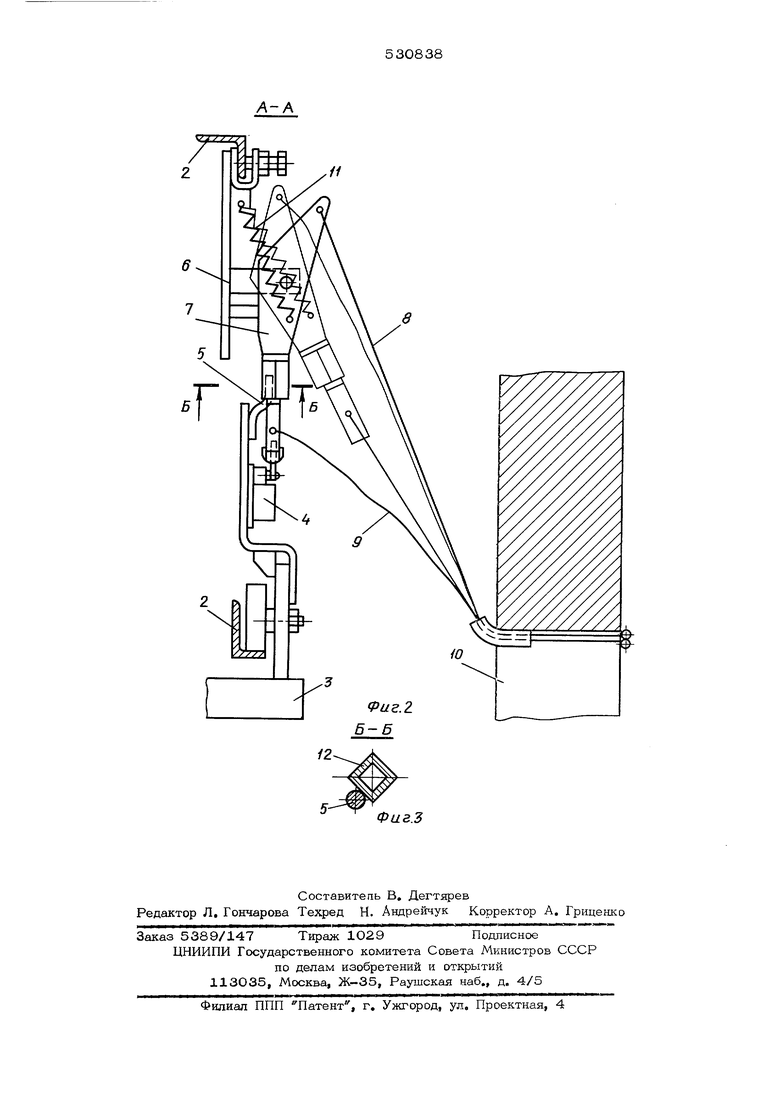
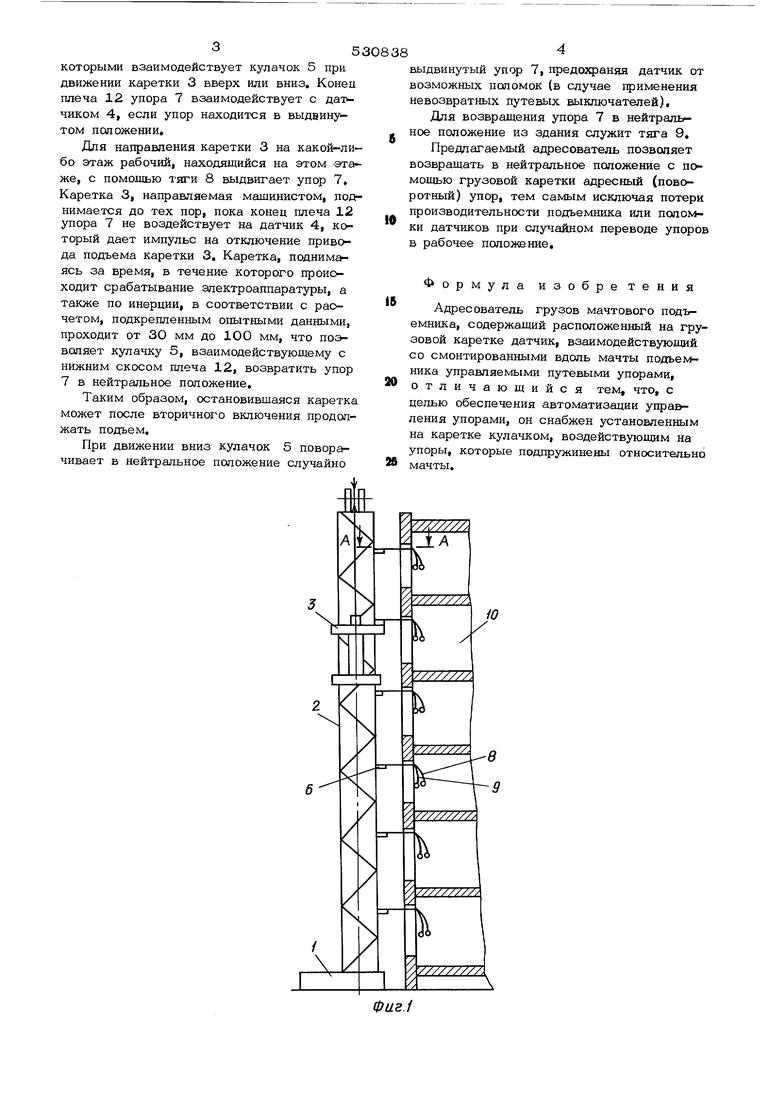
На фиг. 1 изображен подъемник с адресователем; на фиг, 2 - сечение по А-А на фиг. 1; на фиг. 3 - сечение по Б-Б на фиг. 2.
На опорной раме 1 подъемника установлена мачта 2, по которой перемещается грузовая каретка 3,
На каретке 3 установлен датчик 4 и кулачок 5, К мачте 2 в соответствующих местах прикреплены кронштейны 6, с которыми шарнирно соединены поворотные упоры 7. Каждый поворотный упор представляет собой двуплечий рычаг, к обоим плечам которого крепятся гибкие тяги 8 и 9, служащие для управления упором 7 из здания 10. Пружины 11 связывают кронштейн 6 и упор 7 и удерживают последний в выдвинутом или нейтральном положениях. Плечо 12 упора 7 выполнено со скосами, с 35 которыми взаимодействует кулачок 5 при. движении каретки 3 вверх или вниз. Коней плеча 12 упора 7 взаимодействует с дарчиком 4, если упор находится в выдвинутом положении. Для направления каретки 3 на какой-либо этаж рабочий, находящийся на этом -этаже, с помощью тяги 8 выдвигает упор 7, Каретка 3, направляемая машинистом, поднимается до тех nopi пока конец плеча 12 упора 7 не воздействует на датчик 4, который дает импульс на отключение привода подъема каретки 3, Каретка, поднимаясь за время, в течение которого происходит срабатывание электроаппаратуры, а также по инерции, в соответствии с расчетом, подкрепленным опытными данными, проходит от 30 мм до 100 мм, что позволяет кулачку 5, взаимодействующему с нижним скосом плеча 12, возвратить упор 7 в нейтральное положение. Таким образом, остановившаяся каретка может после вторичного включения продолжать подъем. При движении вниз кулачок 5 поворачивает в нейтральное положение случайно выдвинутый упор 7, предозфаняя датчик от возможных поломок (в случае щэименения невозвратных путевых выключателей). Для возвращения упора 7 в нейтральное положение из здания служит тяга 9, Предлагаемый адресователь позволяет возвращать в нейтральное положение с помощью грузовой каретки адресный (поворотный) упор, тем самым исключая потери производительности подъемника или поломки датчиков при случайном переводе упоров в рабочее положение, Формула изобретения Адресователь грузов мачтового подъемника, содержащий расположенный на грузовой каретке датчик, взаимодействующий со смонтированными вдоль мачты подъемника управляемыми путевыми упорами, отличающийся тем, что, с целью обеспечения автоматизации управления упорами, он снабжен установленным на каретке кулачком, воздействующим на упоры, которые подпружинены относительно мачты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адресования грузов мачтового подъемника | 1980 |
|
SU969629A1 |
| Адресователь грузов мачтового подъемника | 1978 |
|
SU861264A1 |
| АДРЕСОВАТЕЛЬ ГРУЗА ДЛЯ ВЫСОТНОГО СТРОИТЕЛЬНОГОПОДЪЕМНИКА | 1971 |
|
SU316633A1 |
| Адресователь грузового подъемника | 1982 |
|
SU1049397A2 |
| Адресователь грузового подъемника | 1977 |
|
SU673573A1 |
| Механизм стопорения грузовой каретки строительного подъемника | 1987 |
|
SU1474063A1 |
| Строительный подъемник | 1988 |
|
SU1588677A1 |
| Механизм стопорения грузовой каретки строительного подъемника | 1988 |
|
SU1557045A1 |
| Предохранительное устройство строительного подъемника | 1981 |
|
SU1093673A2 |
| Устройство для адресования грузов мачтового подъемника | 1988 |
|
SU1551638A1 |