ел ю
4
О
o
Изобретение относится к автоматическому управленшо и может быть использовано в системах программного управления металлорежущими станками.
иель изобретения - повышение точности и быстродействия.
На чертеже приведена принципиальная схема системы.
Следящая 1;истема с компенсаиикй люфта содержит последовательно соединенные задатчик 1, Аазопый дискриминатор 2, сумматор 3, усилитель 4, двигатель 5, тахогенератор 6, редуктор 7 с люфтом, рабочий орган 8 и датчик 9 положения, а также последовательно соединенные интегратор 10, компаратор II, блок 12 сравнения, импульсно-фазовый преобразователь 13 и запомтшющее устройство 14.
Следящая система работает следующим образом.
Параметры системы: коэеЬсЬиг.иент передачи тахогенератора 6, постоянная времени интегратора 1 О, уставка пере ключения компаратора I1, дискретность датчика 9 положения, например фотоимпульсного типа и их стабильность выбираются из условия изменени напряжения юттегратора 10 от О до порога срабатывания компаратора 11 при повороте вала двигателя 5 на одну дискрету (импульс f) дат чика 9 положения. Компаратор 11 после переключения сбрасьгаает интегратор 10, который вновь переключает компаратор II в исходное состояние. В результате на его выходе появляется импульс ,;, аналогичны импульсу fj. В
.1 . JJ установившемся режиме слежения импульсы ffl и f, совпадают, а их разность на
L и LJ совпадают, а их разность выходе блока 12 сравнения равна О
Л f
а
0.
В запоминаюи1ем устройстве 14 хранится разность 4f, равная значению люфта в импульсах f при предьщугцем реверсе двигателя 5, а обработка гза- дания идет по датчику 9 положения через импульсно-фазовыГ преобразователь 13.
При реверсе двигателя 5 по признаку изменения знака задания f на противоположный происходит считывание значения ;пофта из запоминающего уст45
50
Следящая система, содержащая последовательно соединенные задатчик, фазовый дискриминатор, сумматор, уси литель, двигатс .;ь. гахогенерэтор, ре дуктор, рабочий L. pi aH и датчик поло- , выход гахогенератора подключен к BTopi;-;y входу сумматора, от личающаяся тем, что, с це- jn- o повыщения точности и быстродействия системы путем компенсации люфта редуктора, введены последовательно соединенные интегратор, компаратор и блок сравнения, импульсно-фазо вый преобразователь, а также запоминающее устройство, причем сигнальный вход интегратора соединен с выходом тахогенератора, вход обнуления - с выходом компаратора, сигнальные входы импульсно-фазового преобразователя и блока сравнения, записывающий вход запоминающего устройства подклю чены к выходу датчика положения, счи тывающиз вход запоминающего устройст ва связан с вьпсодом задатчика, сиг- нальньй вход - с выходом блока срав- .нения, а вькод - с установочным входом импульсно-фазового преобразователя, выход которого подключен к вто рому входу фазового дискриминатора.
ройства 14 в импульсно-фазовый преоб- - и управляющий вход импульсно-фазово0
5
5
0
0
5
0
5
0
сов относительно задания на величину, равную люфту. Двигатель 5 форсированно отрабатывает заданное рассогласование с контролем положения вала по илтсгрированному сигналу i тахогенератора 6. Одновр -меипо происходит на- импульс ОБ 1 текущего значения . пофта в запоминающем устройстве 14 и их фиксац1 я по первому иь1- пульсу f,j при в(лходс двигателя из люфта. Далее ,.5я снязь по поло- жешго 1втомат ическч: 11ореключается с сигнала f на f .
При отсутствии задания автоколебания двигателя в люфте устраняются в сторону раскрытия л)офта связью по интегрированному сигналу тахогенератора 6; в противоположную сторону - по датчику 9 положения. В результат : двигатель 5 остается на границе люфта, а в запоминающем устройстве 14 хранится ei o истинное значение.
Формула изобретения
Следящая система, содержащая последовательно соединенные задатчик, фазовый дискриминатор, сумматор, усилитель, двигатс .;ь. гахогенерэтор, редуктор, рабочий L. pi aH и датчик поло- , выход гахогенератора подключен к BTopi;-;y входу сумматора, отличающаяся тем, что, с це- jn- o повыщения точности и быстродействия системы путем компенсации люфта редуктора, введены последовательно соединенные интегратор, компаратор и блок сравнения, импульсно-фазо- вый преобразователь, а также запоминающее устройство, причем сигнальный вход интегратора соединен с выходом тахогенератора, вход обнуления - с выходом компаратора, сигнальные входы импульсно-фазового преобразователя и блока сравнения, записывающий вход запоминающего устройства подключены к выходу датчика положения, счи- тывающиз вход запоминающего устройства связан с вьпсодом задатчика, сиг- нальньй вход - с выходом блока срав- .нения, а вькод - с установочным входом импульсно-фазового преобразователя, выход которого подключен к второму входу фазового дискриминатора.
и управляющий вход импульсно-фазово
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Следящий электропривод с компенсацией люфта | 1974 |
|
SU535550A1 |
| Устройство для программного управления электроприводом | 1980 |
|
SU1198458A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДАМИ ПОДАЧ ДВУХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ РАВНОЗНАЧНЫХ ВЕДУЩИХ КООРДИНАТ ЗУБОДОЛБЕЖНОГО СТАНКА | 1991 |
|
RU2025257C1 |
| Следящий электропривод | 1974 |
|
SU607178A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Привод ориентации шпинделя металлорежущего станка | 1984 |
|
SU1241194A1 |
Изобретение относится к автоматическому управлению, а именно к следящим системам приводов металлорежущих станков. Цель изобретения - повышение точности системы и ее быстродействия. Система содержит последовательно соединенные задатчик 1, фазовый дискриминатор 2, сумматор 3, усилитель 4, двигатель 5, тахогенератор 6, выход которого соединен с вторым входом сумматора 3, редуктор 7 с люфтом, рабочий орган 8, датчик положения 9, последовательно соединенные интегратор 10, компаратор 11, блок сравнения 12, импульсно-фазовый преобразователь 13, а также запоминающее устройство 14. Сигнальный вход интегратора 10 соединен с выходом тахогенератора 6, установочный вход - с выходом компаратора 11, сигнальные входы блока сравнения 12 и импульсно-фазового преобразователя 13 вместе подключены к выходу датчика положения 9 и к записывающему входу запоминающего устройства 14, считывающий вход которого связан с выходом задатчика 1, сигнальный вход - с выходом блока сравнения 12, а выход - с установочным входом импульсно-фазового преобразователя 13, выход которого подключен к второму входу фазового дискриминатора 2. 1 ил.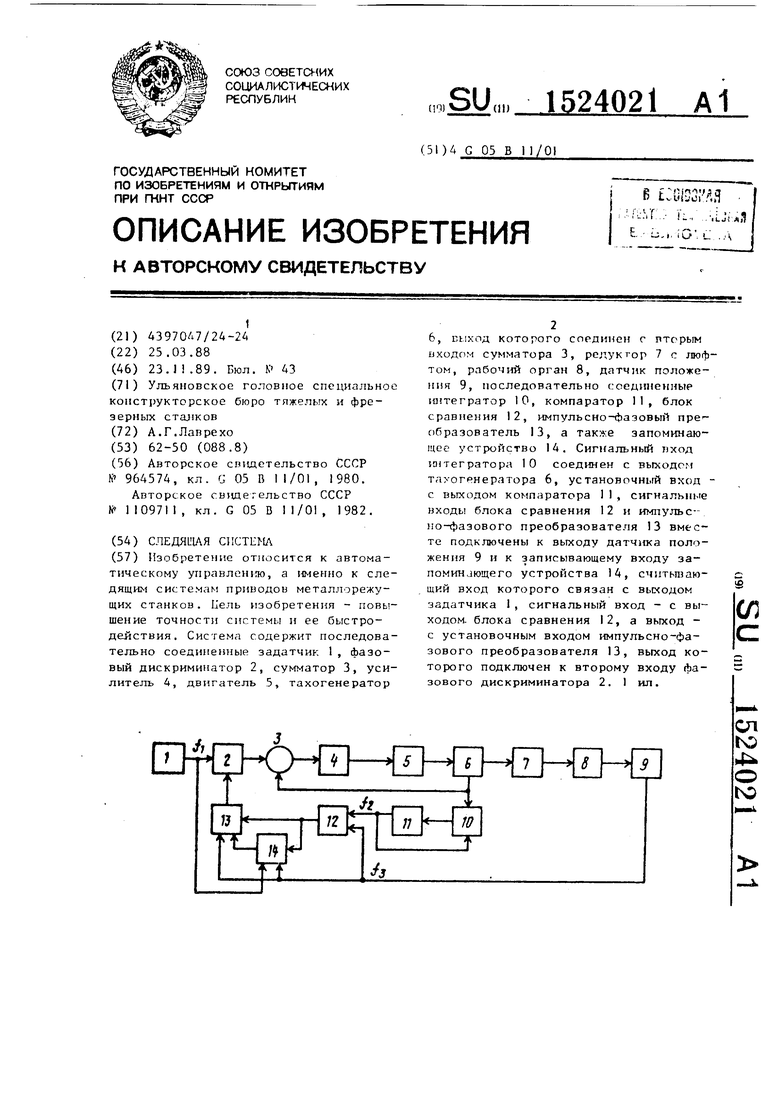
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
