(54) ПРОМЕЖУТОЧНЫЙ НОСИТЕЛЬ ИНСТРУМЕНТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Многоцелевой станок | 1989 |
|
SU1660937A1 |
| Устройство автоматической смены инструмента | 1981 |
|
SU1007907A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| Устройство для автоматической смены инструмента и инструментальных головок на металлорежущем станке | 1987 |
|
SU1481026A1 |
| Устройство автоматической смены инструмента | 1983 |
|
SU1117182A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Многооперационный станок | 1987 |
|
SU1469729A1 |
| Многооперационный станок | 1979 |
|
SU880689A1 |
| Многооперационный станок портального типа | 1989 |
|
SU1742029A1 |


1
Изобретение относится к станкостроению и предназначено для использования в шoгooпepaциoнныx станках с ЧПУ и автоматической сменой инструмента.
Известен многооперашгонлый стенок
с ЧПУ, снабженный системой автоматической смены инстру1 {ентов, состоящей из инструментального магазина, встроенного в шпиндельную бабку, манипулятора и промежуточного носителя инструментов, который снабжен механизмом захвата и предназначен для транспортировки инструмента вдоль шпиндельной бабки между манипулятором и инструментальным магазином
К недостйтку известного станка еле- дует отнести то, что необходимость пе ремещения инструментов вдоль шпиндельной бабки приводит к такому расположению механизма захвата на промежуточном носителе, при котором чрезмерно увеличивается радиус захватного рычага манипулятора и, следовательно, растут динамические нагрузки при сохранении времени срабатывания механизма.
Уменьшение радиуса захватного рычага
манипулятора может быть достигнуто путем разворота механизма захвата промех уточного носителя по траектории, обеспечиваюшей огибание инструментом корпу и механизмов шпиндельной бабки. Для сокрашения времени цикла смены промежуточный носитель должен стыковаться с шпиндельной бабкой в любом месте на длине хода.
Целью данного изобретения является обеспечение разворота промежуточного носителя по постоянной траектории движения относительно шпиндельной бабки в любом ее положении.
Согласно изобретению механизм захвата инструмента промежуточного носителя установлен с возможностью поворота вокруг продольной оси носителя, на наружной пилиндрической поверхности поворотной части которого выполнен винтовой паз взаимодействующий с неподвижно закрепленным на шпиндельной бабке нацравяяющим пальцем.
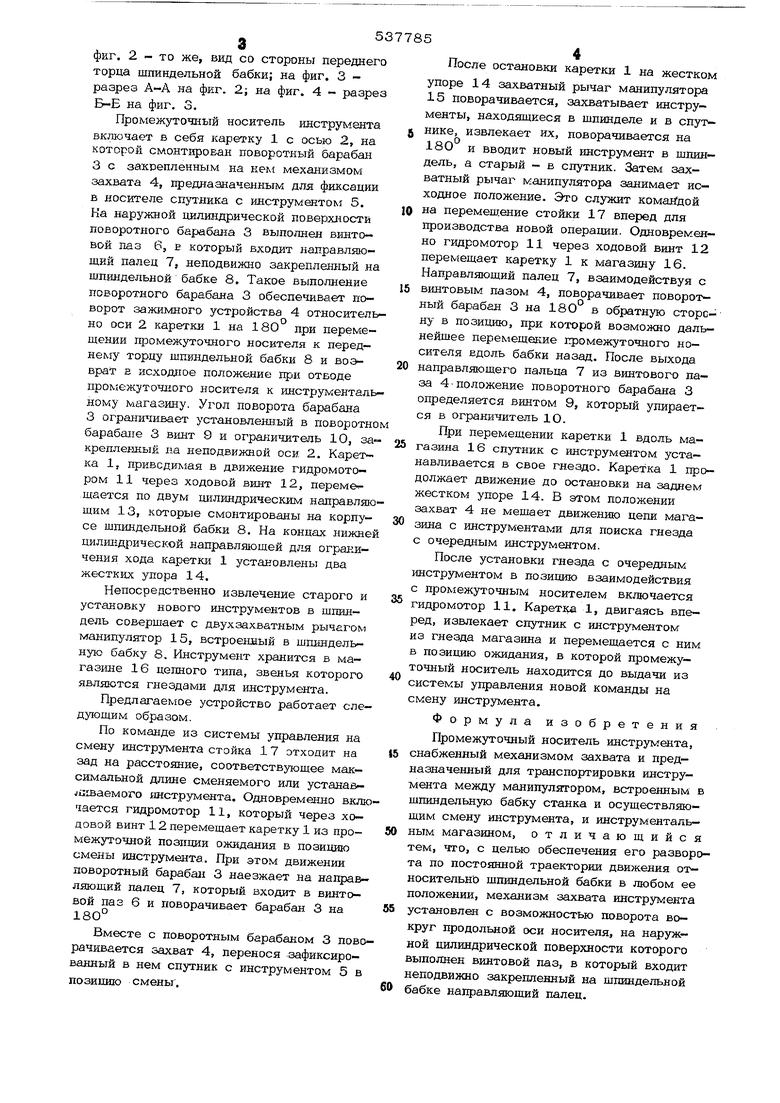
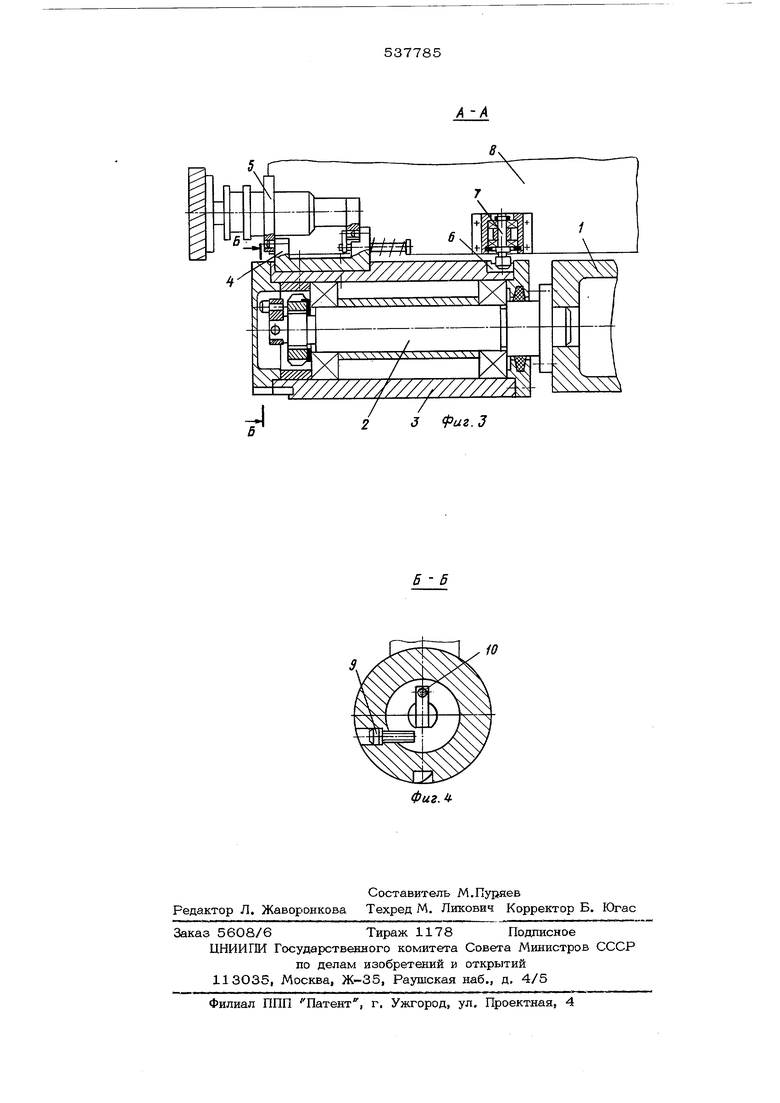
На фиг. 1 изображен предлагаемый носитель, установленный на станине; на фиг. 2 - то же, вид со стороны переднего торца шпиндельной бабки; на фиг. 3 разрез А-А на фкг. 2; на фиг. 4 - разрез Б-Б на фиг. 3. Промежуточный носитель инструмента включает в себя каретку 1 с осью 2, на которой смонтирован поворотный барабан 3 с закрепленным на нем механизмом захвата 4, предназначенным для фиксации в носителе спутника с инструментом 5. Ка наружной цилиндрической поверхности поворотного барабана 3 выполнен винтовой паз 6, в который входит направляющий палец 7, неподвижно закрепленный на шпиндельной бабке 8. Такое выполнение поворотного барабана 3 обеспечивает поворот зажимного устройства 4 относитель но оси 2 каретки 1 на 180 при перемещении промежуточного носителя к переднему торцу шпиндельной бабки 8 и возврат в исходное положение при отводе пpo ;eжyтoчIioгo носителя к инструменталь ному магазину. Угол поворота барабана 3 ограничивает установленный в поворотн барабане 3 винт 9 и ограничитель 10, за крепленный на неподвижной оси 2. Каретка 1, привсдЕПч ая в движение гидромотором 11 через ходовой винт 12, переме щается по двум цилиндрическим направляю щим 13, которые смонтированы на корпусе шпиндельной бабки 8. На концах нижне цилшщрической направляющей для ограничения хода каретки 1 установлены два жестких упора 14. Непосредственно извлечение старого и установку нового инструментов в шпиндель совершает с двухзахватным рычагом манипулятор 15, встроенный в шшшдельную бабку 8. Инструмент хранится в магазине 16 цепного типа, звенья которого являются гнездами для инструмента. Предлагаемое устройство работает сле дующим образом. По команде из системы управления на смену инструмента стойка 17 этходит на зад на расстояние, соответствуюшее максимальной длине сменяемого или устанавjijiBaeMoro {шструмента. Одновременно вкл чается гидромотор 11, который через ходовой винт 12 перемещает каретку 1 из промежуточной позиции ожидания в позицию смены инструмента. При этом движении поворотный барабан 3 наезжает на направ ляющий палец 7, который входит в винтовой паз 6 и поворачивает барабан 3 на 180° Вместе с поворотным барабаном 3 пов рачивается захват 4, перенося зафиксированный в нем спутник с инструментом 5 в позицию смены. После остановки каретки 1 на жестком упоре 14 захватный рычаг манипулятора 15 поворачивается, захватывает инструменты, находящиеся в шпинделе и в спут- их, поворачивается на нике, извлекает 180 и вводит новый инструмент в шпиндель, а старый - в спутник. Затем захватный рычаг манипулятора занимает исходное положение. Это служит командой на перемещение стойки 17 вперед для производства новой операции. Одновременно гидромотор 11 через ходовой винт 12 перемещает каретку 1 к магазину 16. Направляющий палец 7, взаимодействуя с винтовым пазом 4, поворачивает поворотный барабан 3 на 180° в обратную сторону в позицию, при которой возможно дальнейшее перемещение громежуточного носителя вдоль бабки назад. После выхода направляющего пальца 7 из винтового паза 4-положение поворотного барабана 3 определяется винтом 9, который упирается в ограничитель 1О. При перемещении каретки 1 вдоль магазика 16 спутник с инструментом устанавливается в свое гнездо. Каретка 1 продолжает движение до остановки на заднем жестком упоре 14. В этом положении захват 4 не мешает движению цепи магазина с инструментами для поиска гнезда с очередным инструментом. После установки гнезда с очередным инструментом в позицию взаимодействия с промежуточным носителем включается гидромотор 11, Каретка 1, двигаясь вперед, извлекает спутник с инструментом из гнезда магазина и перемещается с ним в позищио ожидания, в которой промежуточный носитель находится до выдачи из системы управления новой команды на смену инструмента. Формула изобретения Промежуточный носитель инструмента, снабженный механизмом захвата и предназначенный для транспортировки инструмента между манипулятором, встроенным в шпиндельную бабку станка и осуществляющим смену инструмента, и инструментальным магазином, отличающийся тем, что, с целью обеспечения его разворота по постоянной траектории движения от- носительно шпиндельной бабки в любом ее положении, механизм захвата инструмента установлен с возможностью поворота вокруг продольной оси носителя, на наружной цилиндрической поверхности которого выполнен винтовой паз, в который входит неподвижно закрепленный на шпиндельной бабке направляющий палец.
tr
Ш№
л
5J
Г 1 г-PI
4-v
f
7
S:x ZZZZ2//чУ К Х|1
X
y///////////////////
S
V/////////,
Л. VX X
XWi: / /
2J pLiz. 3
