Изобретение относится к станкостроению, в частности к устройствам автоматической смены инструментаьмногоцелевых станках.
Известно устройство автоматической смены инструмента многоцелевого станка, содержащее инструментальный магазин и механизм нерекоса инструмента в виде перемещаемого от магазина к щпиндельной бабке манипулятора с рукой 1.
Недостаток известного устройства - значительное общее время цикла смены инструмента.
Цель изобретения - повыщение производительности путем сокращения времени на смену инструмента.
Указанная цель достигается тем, что в устройстве автоматической смены инструмента многоцелевого станка, содержащем инструментальный магазин и механизм перекоса инструмента в виде перемещаемого от магазина к щпиндельной бабке манипулятора с рукой, щпиндельная бабка снабжена, жестко установленным на ней пальцем, а рука выполнена из трех частей, средняя из которых представляет собой закрепленный на оси манипулятора .рычаг со штырями и втулками с фигурным пазом, а крайние части выполнены в виде спутников, снабженных захватными рычагами инструмента, фиксаторами инструмента, подпружиненными плунжерами и поворотными пальцами с кулачками, при этом один из подпружиненных плунжеров установлен с возможностью взаимодействия со щтырем рычага на оси манипулятора, а второй - с пальцем, жестко установленным на щпиндельной бабке, причем поворотный палец установлен с возможностью одновременного взаимодействия с захватными рычагами инструмента, фиксатором инструмента и фигурным пазом, выполненным во втулках рычага манипулятора.
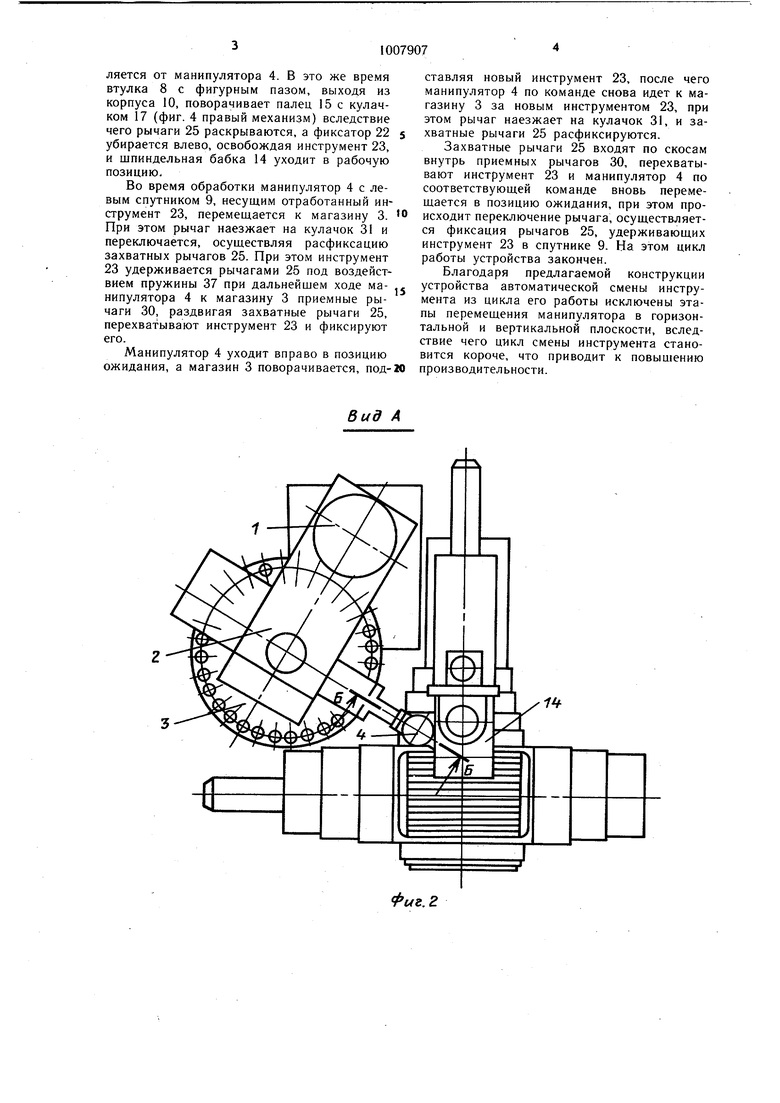
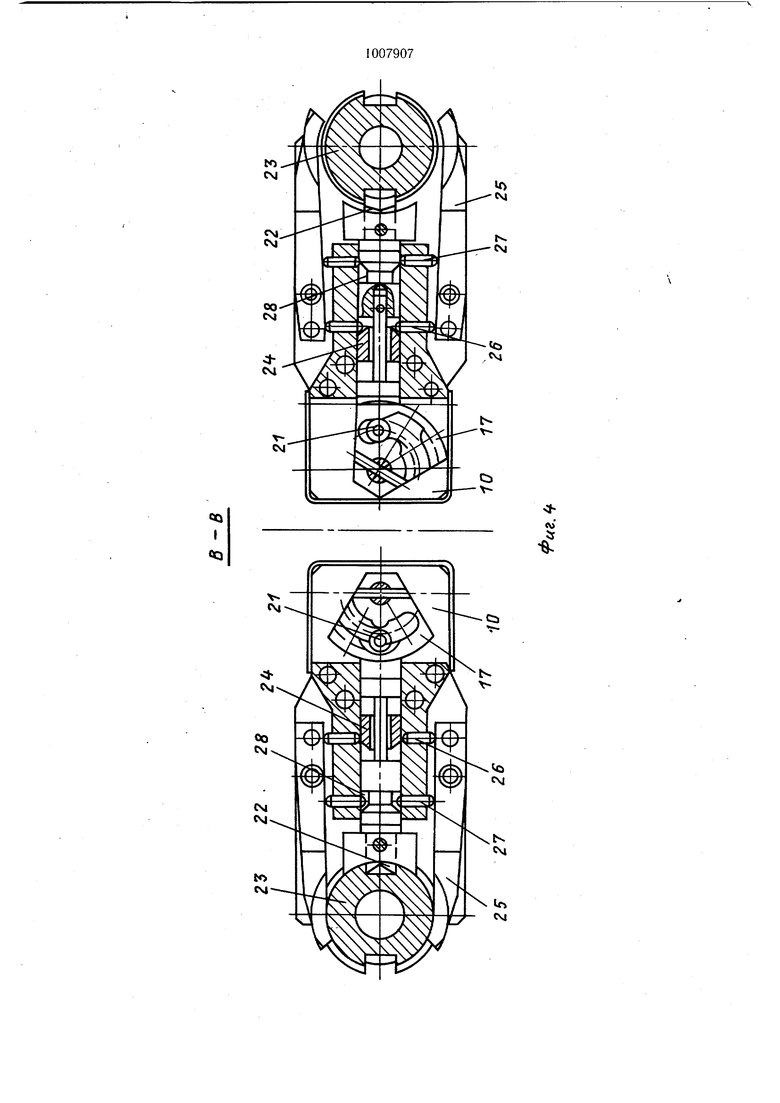
На фиг. 1 показан многоцелевой станок с устройством автоматической смены инструмента, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - сечение В-В на фиг. 3; на фиг. 5 - сечение Г-Г на фиг. 3; на фиг. 6 - сечение Д-Д на фиг. 3; на фиг. 7 -сечение Е-Е на фиг. 3.
На стойке 1 корпуса 2 установлен диск инструментального магазина 3 и перемещаемый манипулятор 4, на оси 5 которого закреплен рычаг б, имеющий симметрично расположенные относительно оси 5 щтыри 7, втулки 8 и спутники 9. В корпусе 10 спутника 9 имеются подпружиненный плунжер II, взаимодействующий со щтырем 7, подпружиненный плунжер 12, взаимодействующий с пальцем 13, закрепленным на корпусе щпиндельной бабки 14, и поворотный палец 15, взаимодействующий посредством роликов 16 с фигурным пазом втулки 8 и несущий кулачок 17, имеющий замкнутые
пазы, куда входят ролики 18 и 19 с осями 20 и 21 соответственно.
Ось 20 жестко соединена с фиксатором 22 инструмента 23, а ось 21 жестко связана 5 с втулкой 24, имеющей наружный конус. В корпусе 10 щарнирно установлены захватные рычаги 25, внутренние поверхности которых контактируют со щтифтами 26 и 27, также располагающимися в корпусе 10. На оси фиксатора 22 имеется кольцевая
проточка 28. В каждом гнезде 29 магазина 3 размещены щарнирно закрепленные приемные рычаги 30, конфигурация скосов которых соответствует конфигурации захватных рычагов 25. На корпусе магазина жестj ко закреплен кулачок 31, а на корпусе 32 манипулятора 4 установлен двухпозиционный рычаг 33, связанный через втулку 8 с поворотным пальцем 15. С нижней стороны корпуса 32 выполнен кольцевой паз 34, куда входят хвостовики втулок 8. В щтыре
0 7 и пальце 13 имеются лунки 35, а в корпусе между плунжерами 11 и 12 помещен щарик 36. Пружины 37 через плунжеры 38 воздействуют на рычаги 25.
Устройство работает следующим образом. Шпиндельная бабка 14 с отработавщим
5 инструментом 23 движется из рабочего положения в положение смены инструмента, а манипулятор 4 находится в правом положении и несет левый спутник 9 с новым инструментом 23. Магазин 3 готов к приему отработавщего инструмента.
При перемещении щпиндельной бабки 14 вверх штырь 7 входит в отверстие корпуса 10 спутника 9 и утапливает подпружиненный плунжер 11, палец 15 входит в фигурный паз втулки 8, поворачиваясь при этом на угол, определяемый образующей паза. При повороте пальца 15 связанный с ним кулачок 17 также поворачивается, перемещая вправо втулку 24 и фиксатор 22, который входит в паз инструмента 23. При этом конус втулки 24 выдвигает щтифты 26
0 на захватные рычаги 25 которые, поворачиваясь под действием этого вокруг своих щарниров, воздействуют на штифты 27, утапливаемые в кольцевой проточке 28 и захватывают инструмент 23, надежно удерживая его. В это же время щарик 36 входит в лунку 35 штыря 7 и тем самым освобождает палец 13, в результате чего щпиндельная бабка 14 получает возможность свободно уйти вверх, оставляя на манипуляторе 4 правый спутник 9.
После этого по команде осуществляется
поворот манипулятора 4 на 180° и ось нового инструмента 23 совмещается с осью щпинделя бабки 14, которая по соответствующему сигналу начинает двигаться вниз. Во время этого движения палец 13 входит в от5 верстке на корпусе 10 спутника 9, несущем новый инструмент 23 и, надавливая на плунжер 12, осуществляют переключение щарика 36, в результате чего спутник 9 отделяется от манипулятора 4. В это же время втулка 8 с фигурным пазом, выходя из корпуса 10, поворачивает палец 15 с кулачком 17 (фиг. 4 правый механизм) вследствие чего рычаги 25 раскрываются, а фиксатор 22 убирается влево, освобождая инструмент 23, и шпиндельная бабка 14 уходит в рабочую позицию.
Во время обработки манипулятор 4 с левым спутником 9, несущим отработанный инструмент 23, перемещается к магазину 3. При этом рычаг наезжает на кулачок 31 и переключается, осуществляя расфиксацию захватных рычагов 25. При этом инструмент 23 удерживается рычагами 25 под воздействием пружины 37 при дальнейшем ходе манипулятора 4 к магазину 3 приемные рычаги 30, раздвигая захватные рычаги 25, перехватывают инструмент 23 и фиксируют его.
Манипулятор 4 уходит вправо в позицию ожидания, а магазин 3 поворачивается, подставляя новый инструмент 23, после чего манипулятор 4 по команде снова идет к магазину 3 за новым инструментом 23, при этом рычаг наезжает на кулачок 31, и захватные рычаги 25 расфиксируются.
Захватные рычаги 25 входят по скосам внутрь приемных рычагов 30, перехватывают инструмент 23 и манипулятор 4 по соответствующей команде вновь перемещается в позицию ожидания, при этом происходит переключение рычага, осуществляется фиксация рычагов 25, удерживающих инструмент 23 в спутнике 9. На этом цикл работы устройства закончен.
Благодаря предлагаемой конструкции устройства автоматической смены инструмента из цикла его работы исключены этапы перемещения манипулятора в горизонтальной и вертикальной плоскости, вследствие чего ЦТ1КЛ смены инструмента становится короче, что приводит к повышению производительности.
Вид А ..
OQ I
OQ
(
Л)
А-Д
.б
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоцелевой станок с автоматической сменой инструмента | 1981 |
|
SU1009706A1 |
| Горизонтальный многоцелевой станок с автоматической сменой инструмента | 1983 |
|
SU1144836A1 |
| Промежуточный носитель инструмента | 1974 |
|
SU537785A1 |
| Многоцелевой станок с автоматической сменой инструмента | 1986 |
|
SU1342669A1 |
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Шпиндельная бабка пруткового автомата | 1971 |
|
SU405261A1 |
| Станок для обработки глухих отверстий | 1979 |
|
SU984834A1 |
| Устройство для крепления инструмента в шпинделе металлорежущего станка | 1985 |
|
SU1263446A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Автооператор для автоматической смены инструмента | 1984 |
|
SU1255371A1 |


УСТРОЙСТВО АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТА многоцелевого станка, содержащее инструментальный магазин и механизм переноса инструмента в виде перемещаемого от магазина к шпиндельной бабке манипулятора с рукой, отличающееся тем, что, с целью повыщения производительности путем сокращения времени на смену инструмента, шпиндельная бабк;1 снабжена жестко установленным на ней пальцем, а рука выполнена из трех частей, средняя из которых представляет собой закрепленный на оси манипулятора рычаг со щтырями и втулками с фигурным пазом, а крайние части выполнены в виде спутников, снабженных захватными рычагами инструмента, фиксаторами инструмента, подпружиненными плунжерами и поворотными пальцами с кулачками, при этом один из подпружиненных плунжеров установлен с возможностью взаимодействия со штырем рычага на оси манипулятора, а второй -с пальцем, жестко установленным на шпиндельной бабке, причем поворотный палец установлен с возможностью одновременного взаимодействия с захватными рычагами инструмента, фиксатором инструмента и фигурным пазом, выполненным во втулках рычага манипулятора. СО
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматической смены инструмента модели АТС фирмы «Kelch ФРГ. | |||
