1
Изобретение относится к области автоматики и вычислительной техники и предназначено для позиционного управления станками для сверления плат.
Известны устройства дтгя программного управления, содержащие датчик перемещения счетчик-регистр ,бпок ввода и промежуточного запоминания информации, блок задания скорости и привод подач 1, 2, З.
Недостатком известных систем является необходимость большого количества оборудования, так как в них функцию промежуточного запоминания и управления обработкой перемещений выполняют два отдельных устройства: блок ввода и промежуточного запоминания и регистр-счетчик.
Наиболее близким техническим решением к заданному изобретению является устройство для позиционного программного управления станками, содержащее блок ввода программы, подключенный к блоку управления и к триггерным регистрам, соединенным через бпок управления с приводами рабочих подач, подключенными к датчикам перемещения f4.
Недостаток этого устройства заключается в сложности и низком быстродействии, так как при использовании в качестве блока ввода программы фотоэлектрического устройства необходимо подключение блока хранения информации.
Целью изобретения является упрощение и повышение быстродействия устройства.
Поставленная цель достигается тем, что в предложенное устройство введены группы элементов И. Первые входы элементов И соответствующей группы соединены с нулевыми входами соответствующих триггеров предыдущих триггерных регистров, выходы - со счетными входами соответствующих триггеров последующих триггерных регистров.Вторые входы элементов И всех групп подключены к выходу блока управления, а счетные входы соответствующих триггеров первого триггерного регистра - к датчикам перемещения.
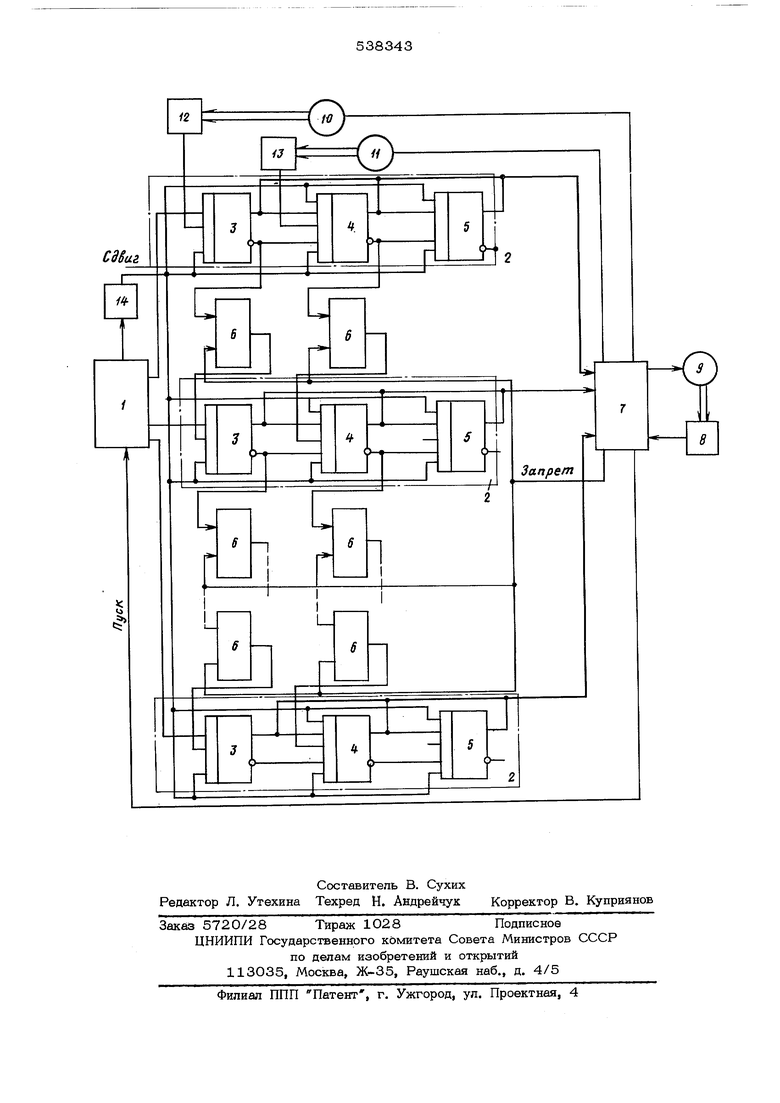
На чертеже дана схема устройства. Оно содержит бпок ввода программы 1, триггерные регистры 2 по числу дорожек применяемого программоносителя, например Иерфопенты, состоящие из триггеров 3-5
группы элементов И 6, блок управления 7, датчик 8 и привод 9 сверления, приводы рабочих подач 1О, 11, датчики перемещения 12 и 13 и блок задержки 14.
Устройство работает следующим образом. В исходном состоянии триггеры 3-5 регистров обнулены. С блока 7 на потенциальные входы всех элементов 6 поступает сигнал запрета и закрывает их.
Информация о перемещении записана на перфоленте в двоичном коде и разделена на кадры. Фиксированный кадр программы имеет четыре строки: 1-я строка - командная информация сверлить или нет, направление перемещения, 2-я строка - информация пере смещения по X, 3-я строка - информация перемещения по У, 4-я строка - конец кадра.
При поступлении на блок 1 сигнала Пус информация с перфоленты построчно поступает на первые триггеры 3 регистров и синхроимпульсом с ведущей дорожки, задержа ным относительно сигналов с кодовых дорожек, сдвигается в следующие триггеры 4 и 5 регистров до останова блока 1 по пробивке на ленте конец кадра.
Сигнал конец кадра поступает в блок 7, который выдает разрещающий потенциал на элементы И 6.
С помощью связей между триггерами регистров и элементами И 6 строятся два счетчика: счетчик, содержащий триггеры 3 регистров с цифровой информацией перемещения по оси V и счетчик, содержащий триггеры 4 регистров с цифровой информацией перемещения по оси X.
Командная информация непосредственно с триггером 5 регистров поступает в блок 7. Он выдает сигнал начала перемещения на приводы рабочих подач 1О и 11. Как только начинается перемещение, датчики 12, 13 выдают сигналы на младщие разряды счетчиков. Счетчики начинают работать на вычитание. Блок анализирует состояние счетчиков и при обнулении их выдает команду на останов приводов рабочих подач , команду на сверление и на занесение следующего кадра информации. Занесение следую,щего кадра идет Б:О время сверления, после возврата шпинделя в исходное положение начинается его отработка, и цикл повторяется. Применение элементов И в связях между триггерами регистров сдвига для построения счетчиков исключает промежуточную память, тем самым уменьшается количество оборудования и упрощается схема управления. Исключение передачи информации из промежуточной памяти в счетчик-регистр, как в позиционных системах программного управления число импульсного типа, позволяет увеличить &1Стродействие устройства.
Формула изобретения
Устройство для позиционного программного управления станками, содержащее блок ввода программы, подключенный к блоку управления и к триггерным регистрам, соединенным через блок -управления с приводами рабочих подач, подключенными к датчикам перемещения, отличающееся тем, что, с целью упрощения и повышения быстродействия устройства, оно содержит группы элементов И, первые входы элементов И соответствующей группы соединены с нулевыми выходами соответствующих триггеров предыдущих триггерных регистров, выходы - со счетными входами соответствующих триггеров последующих триггерных регистров, вторые входы элементов И всех групп подключены к выходу блока управления, а счетные входы соответствующих триггеров нервого триггерного регистра подключены к датчикам перемещения.
Источники информации, принятые во внимание при экспертизе;
1. Авторское свидетельство СССР № 344933, М.Кл G О5 В 19/14,197О.г.
СССР
2.
Авторское свидетельство 378810, М.Кл G 05 В 19/30,1971 г.
3.Патент США № 366693О, 235-151. 11, 1972.
4.Авторское свидетельство СССР
№ 267303, М.Кл. G. 05 G. 7/52, 1968г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления станком | 1985 |
|
SU1352458A1 |
| Цифровое устройство для управления станком | 1984 |
|
SU1223210A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Устройство для позиционного программного управления | 1982 |
|
SU1068895A1 |
| УСТРОЙСТВО числового ПРОГРАММНОГО УПРАВЛЕНИЯСТАНКАМИ | 1969 |
|
SU257265A1 |
| Устройство для числового двухкоординатного программного управления | 1973 |
|
SU497561A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Устройство для позиционного управления | 1983 |
|
SU1124257A1 |
| Устройство для поиска информации | 1980 |
|
SU920703A1 |
| Контурная система программного управления | 1989 |
|
SU1681298A1 |