1
Изобретение относится к автоматизации гидравлических прессов.
Известио устройство для защиты гидравлического пресса от перегрузок, содержащее датчики перегрузки и исполнительный элемент, соединенные со схемой логической обработки сигналов. Известное устройство не может быть применено для прессов, имеющих рамную конструкцию, так как напряжения, возникающие в раме, не имеют строгой зависимости от величины момента эксцентричного иагружения 1.
С целью повышения эффективности защиты от перегрузки гидравлических прессов жесткой конструкции, преимуществеипо рамных в предлагаемом устройстве в качестве датчиков перегрузки использованы датчики давления, связанные с гидроцилиндрами синхронизации и возвратного хода пресса, а схема логической обработки сигналов выполнена в виде двух масщтабирующих сумматоров определения моментов эксцентричного пагружепия относительно осей пресса, соединенных с датчиками давления через согласующие элементы, и рещающего усилителя-компаратора, соединенного с выходами масщтабирующих сумматоров.
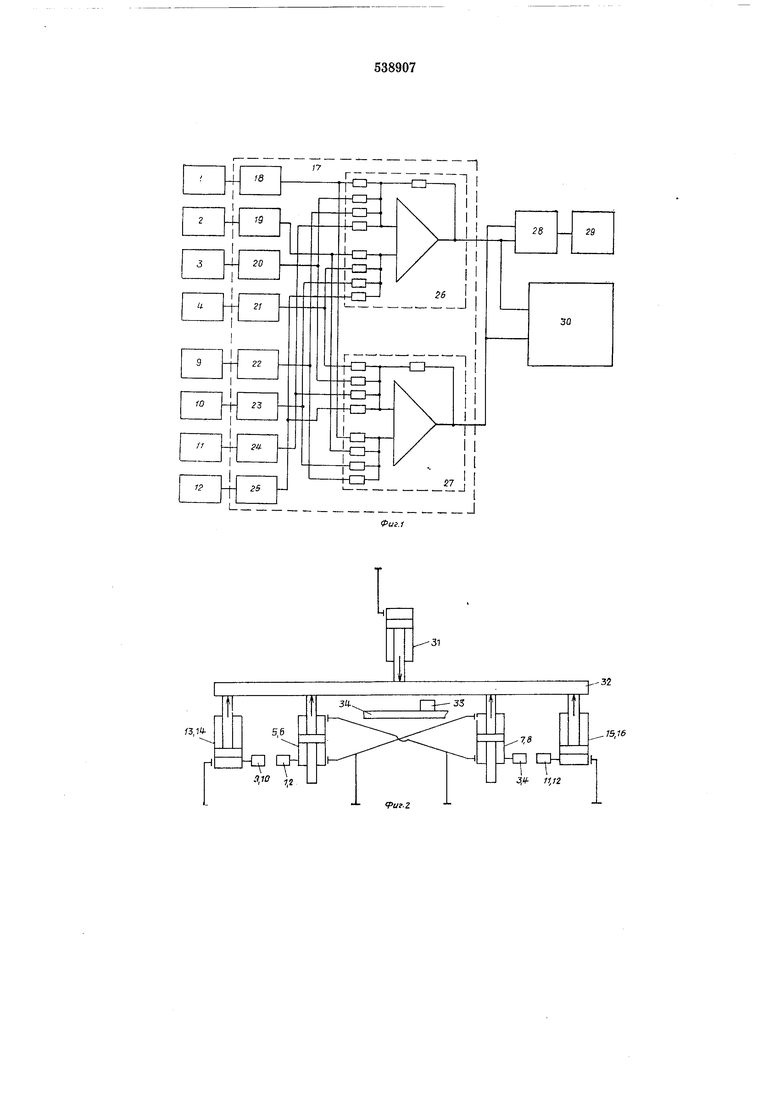
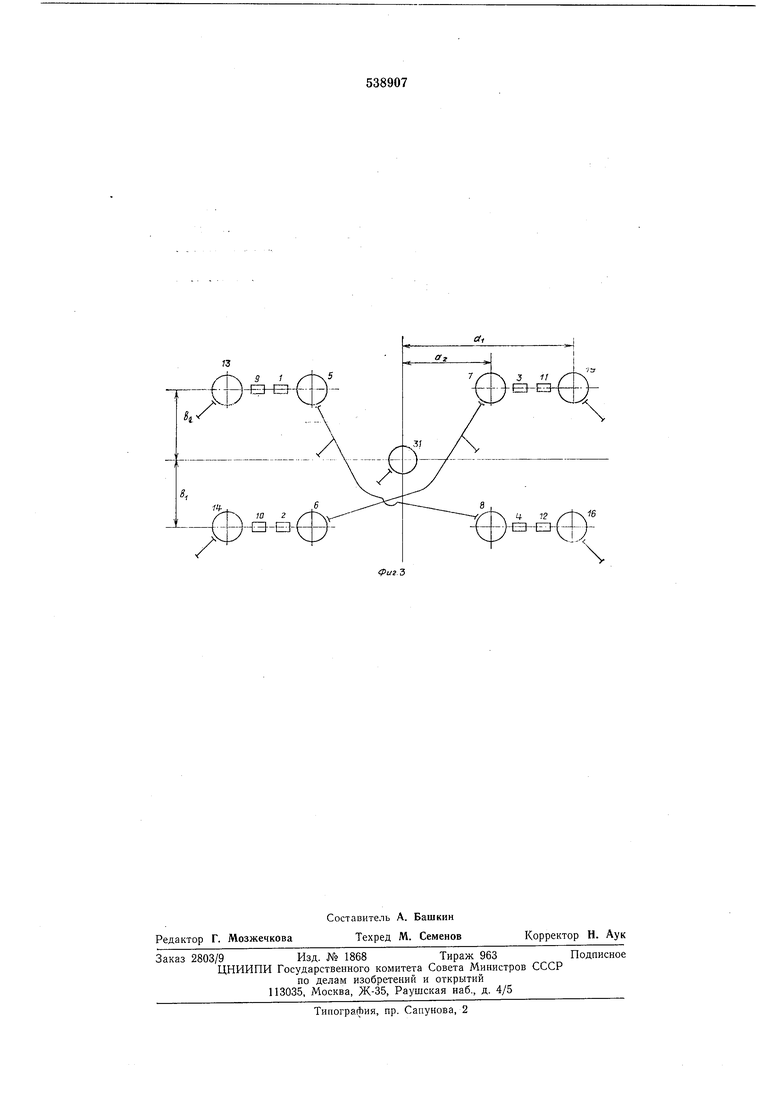
На фиг. 1 показана блок-схема предлагаемого устройства; на фиг. 2 - гидрокинематическая схема управления подвижной траверсой пресса; па фиг. 3 - схема расположения цилипдров пресса и датчиков-давления.
Устройство состоит из датчиков давления -4, связанных с гидроцилипдрами синхронизации 5-8, датчиков давления 9-12, связанных с гидроцилиндрами возвратного хода 13-16, схемы логической обработки сигналов 17, выполненной в виде согласующих элементов 18-25 и двух масщтабирующих сумматоров 26, 27, предиазначепных для определения моментов эксцентричного нагружения относительно осей пресса, рещающего усилителя-компаратора 28, исполпительного элемента 29 и схемы регистрации 30. Выходы датчиков
давления 1-4 и 9-12 соединены со входами схемы логической обработки сигналов 17, выходы которой подключены к входам рещающего усилителя-компаратора 28 и схемы регистрации 30. Выходы согласующих элементов 18-25 соединены с соответствующими входами масщтабирующих сумматоров 26 и 27. Выход рещающего усилителя-компаратора 28 подключеп к входу исполнительного элемента 29.
Под действием усилия, создаваемого рабочим цилиндром пресса 31, подвижная траверса 32 с установленным па пей щтампом воздействует на обрабатываемую деталь 33, установленную па неподвижной траверсе 34.
Устройство работает следующим образом.
Сигналы датчиков давления 1-4 и 9-12 поступают на схему логической обработки сигналов 17, где преобразуются согласующими элементами 18-25 до уровня стандартных сигналов ГСП.
Масштабирующие сумматоры 26 и 27 выполняют операции в соответствии с алгоритмом
+ Л,-Ло-Л
X
Х(Л + Яз-Я.-Л)
b,S, ,,-Я, + 2X
X (Яз + л - Р: - я,) j ,
где Мд: - выходной Сигнал масштабирующего сумматора 26, пропорциональный составляющей момента эксцентричного нагружения относительно оси X;
My - выходной сигнал масштабирующего сумматора 27, пропорциональный составляющей момента зкоцентричного нагружения относительно оси У;
PI-Pit - Сигналы датчиков давления 1-4, пропорциональные давлениям в синхронизирующих цилиндрах 5-8;
Яд-PIZ - сигналы датчиков давления 9-12, пропорциональные давлениям в возвратных цилиндрах 13-16;
2ь Й2 - расстояние до оси У соответственно возвратных и синхронизирующих цилиндров;
бь 02 - расстояние до оси X центров соответственно возвратных и синхронизирующих цилиндров (в частном случае 5ь 2 - рабочие площади соответственно возвратных и синхронизирующих цилиндров.
В формировании выходных сигналов масштабирующих сумматоров 26, 27 принимают участие все датчики давления, так как момент противодействия перекосу подвижной траверсы создается возвратными и синхронизирующими цилиндрами пресса.
С выходов масштабирующих сумматоров 26, 27 сигналы поступают на входы решающего усилителя-компаратора 28. Если вектор момента эксцентричного нагружения выходит за пределы ромба, диагонали которого равны удвоенным допустимым значения1М моментов эксцентричного нагружения относительно ОСей
и У, на еыхОде решающего усилителя-компаратора 28 формируется сигнал, который поступает на вход исполнительного элемента 29, который воздействует на электромагнит запорного вентиля гидропресса.
Одновременно с выходов масштабирующих сумматоров 26, 27 сигналы поступают «а входы схемы регистрации 30, вьшолненной в виде самопишущело двухкоординатного потенциометра, который вычерчивает на диагра МгМной
бумаге годограф вектора момента эксцентричного нагружения пресса.
Формула изобретения
Устройство для защиты гидравлического
пресса от перегрузки, содержащее датчики лерегрузки и иополНИтельный элемент, соединенные СО схемой логической обработки сигналов, отличающееся тем, что, с целью повышения эффективности защиты от перегрузки гидравлических прессов жесткой конструкции, преимущественно рамных, в качестве датчиков перегрузки использованы датчики давления, связанные с гидроцилиндрами синхронизации и возвратного хода пресса, а
схема логической обработки сигналов выполнена в виде двух масштабирующих сумматоров определения моментов эксцентричного нагружения относительно осей пресса, соединенных с датчиками давления через согласующие
элементы, и решающего усилителя-компаратора, соединенного с выходами масштабируюц..их сумматоров.
Р1сточн.ики информации, принятые во внимание при эКСпертизе:
1. «Гидравлические прессы под ред. Б. П. Васильева, М., Машиностроение, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система синхронизации движения траверсы гидравлического пресса | 1988 |
|
SU1574482A1 |
| Система синхронизации движения траверсы гидравлического пресса | 1989 |
|
SU1648796A1 |
| Система синхронизации движения траверсы гидравлического пресса | 1987 |
|
SU1447698A1 |
| Устройство для учета количества циклов нагружений гидравлического пресса | 1976 |
|
SU656084A2 |
| Сервопривод клапанов гидрораспределителя гидравлического пресса | 1990 |
|
SU1810223A1 |
| Система синхронизации движения траверсы гидравлического пресса | 1981 |
|
SU988585A1 |
| Устройство для измерения давления в широком диапазоне | 1978 |
|
SU855415A1 |
| Устройство для автоматического регулирования температуры нагрева заготовок в производственном комплексе индукционная печь-пресс | 1987 |
|
SU1453625A1 |
| Устройство для регулирования силовых параметров и рабочей подачи процесса резания | 1985 |
|
SU1270744A1 |
| Способ управления гидравлическим прессом и устройство для его осуществления | 1989 |
|
SU1682211A1 |
Д14- Риг-г
з
w
;о
(
Ц- г HEh-EIb(4-V
/ -
