Изобретение относится к прессостроению и предназначено для устранения клиновидности штамповки изделий при эксцентричном приложении технологического усилия пресса.
Известна система синхронизации Движения траверсы гидравлического пресса, содержащая синхроннаирукнцие цилиндры, дроссельные распределители и мультипликаторы, подсоединенные одной стороной к синхронизирующим цилиндрам, а другой - к дроссельньм распределителям
Недостатками известной системы являются невысокая точность синхронизации движения траверсы, малое быстродействие, сложность настройки дроссельных распределителей, а также склонность системы к колебаниям ввиду отсутствия специальных корректирующих устройств.
Целью изобретения является повышение точности прессуемых изделий.
Указанная цель достигается тем, что система синхронизации движения траверсы гидравлического пресса, содержащая опирающиеся на станину синхронизирующие цилиндры, штоки которых связаны с траверсой, дроссельные распределители и мультипликаторы.
подсоединенные одной эй стороной к , магистралям синхронизирующих цилиндров, а другой - к дроссельным распределителям, снабжена датчиками давления, установленными в магистралях синхронизирующих цилиндров, датчиками перемещения, механически связанными с плунжерами мультипликаторов, и электропреобразующим устройством,
10 а упомянутые дроссельные распределители вьшолнены в виде электрогндравлических усилителей, при этом выходы упомянутых датчиков давления и .перемещения связаны с входами электро15преобразующего устройства, а его выходы подключены к входам электрогидравлических усилителей.
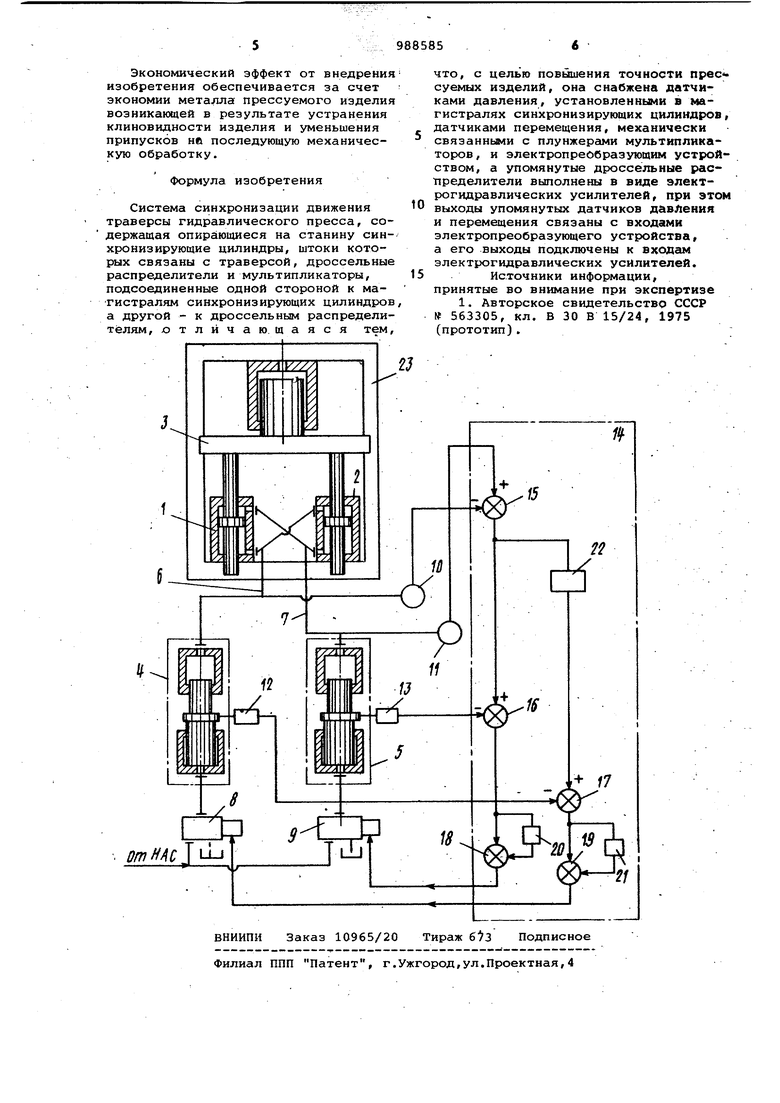
На чертеже представлена схема системы синхронизации движения травер20сы гидравлического пресса.
-Система содержит синхронизируняцие цилиндры 1 и 2, поршни которых механически связаны с подвижной траверсой 3. Мультипликаторы 4 и 5 подсо25единены одной стороной соответственно к магистралям 6 и 7 синхрониэирующих цилиндров, а другой - к дроссель ным распределителям 8 и 9, которые выполнены в виде злектрогидравличес30ких усилителей. Дроссельные распределители 8 и 9 гидравлически соединены с насосно-аккумуляторной станцией (НАС), со сливной магистралью и с мультипликаторами 4 и 5. Магист рали 6.и 7 синхронизирующих цилиндров подключены соответственно к дат :1икам давления 10 и 11. Плунжеры мультипликаторов 4 и 5 механически связаны с датчиками перемещения.12 и 13-, которые подключены к входам электропреобразующего устройства 14 выходы которого соединены с входами электроуправления соответствующих дроссельных распределителей 8 и 9. Электропреобразующее устройство 14 обеспечивает управление работой системы синхронизации.в соответствии с информацией, поступающей от датичков давления 10 и 11 и датчиков перемещения 12 и 13. В состав электропреобразующего устройства 14 входят схемы сравнения 15, 16 и 17 сигналов, схемы суммирования 18 и 19 сигналов, корректирующие устройства 20 и 21 и инвертор 22. Схемы сравнения 15, 16 и 17 сигналов обеспечивают вычитание сигналов, поступающих на их входы, с учетом знаков сигналов. Схемы суммирования и 19 сигналов обеспечивают.сложение сигналов, поступающих на их входы, также с учетом знаков этих сигналов. Корректирующие устройства 20 и 21 повышают устойчивость системы, способствуют быстрому затуханию колебаний. Струк тура корректирующих устройств 20 и 21 зависит от конкретной системы, в их состав обычно входят дифференци рующие звенья. Корпусы синхронизирующих цилиндров закреплены на станине 23. Система синхронизации содержит ч тыре синхронизирующих цилиндра, уст новленных по углам траверсы гидравли ческого пресса. Приведенная на черт же схема поясняет работу части сист мы синхронизации, соответствующей двум .синхронизирующим цилиндрам 1 и 2, установленным вдоль одной из д агоналей траверсы. В исходном положении системы пер крестно соединенные полости синхронизирующих цилиндров заполнены жидкостью под определенным давлением Плунжеры мультипликаторов 4 и 5 зан мают крайнее нижнее положение. На в ходах датчиков перемещения 12 и 13 сигналы отсутствуют. Система синхронизации работает следующим образом. При бесперекосном движении вниз подвижной траверсы 3 жидкость перете кает из нижних полостей синхронизирующих цилиндров в верхние. При эксцентричном нагружении, например, справа, подвижная траверса стремится повернуться против хода часовой стрелки, перемещая поршень синхронизирующего ци.линдра 1 вниз, а поршень синхронизирующего цилиндра 2 вверх. В результате этого давление с одной стороны поршней увеличивается, а с другой уменьшается, и появляется момент, противодействующий перекосу. Поскольку давление в магистрали ё возрастает, а в магистрали 7 уменьшается, то сигнал, поступакндий на вход вычитания-схемы сравнения 15, возрастает, а сигнал, поступающий на вход сложения той же схемы, уменьшается. В результате на выходе схемы сравнения 15 появляется сигнал отрицательного 3Haifa, пропорциональный разности давлений в магистралях 6 и 7. Через инвертор 22 этот сигнал поступает на вход сложения схемы сравнения 17 и далее на один из входов схемы сложения 19, с выхода которой сигнал поступает на вход электроуправления дроссельного распределителя 8. Через схему сравнения 16 и схему сложения 18 сигнал отрицательного знака поступает на вход электроуправления дроссельного распределителя 9. Б результате жидкость высокого давления .от НАС начинает поступать в нижнюю полость мультипликатора 4 , а нижняя полость мультиплика- . тора 5 соединяется со сливом. Плунжер мультипликатора 4 начинает перемещаться вверх, сжимая жидкость в соответствующих полостях синхронизирующих цилиндров, и воздействует на подвижный элемент датчика перемещения 18. В результате возрастает сигнал на выходе датчика перемещения 12. При этом происходит устранение перекоса траверсы. Перемещение вверх плунжера мультипликатора 4 происходит до тех пор, пока не уравняются сигналы, поступающие на входы схемы сравнения 17 от датчика перемещения 12 и инвертора 22. При этом поступление жидкости в нижнюю полость мультипликатора 4 прекращается. При эксцентричном нагружении слева давление в магистрали 7 yвeJ ичивaeт-. ся, а в магистрали 6 уменьшается. На выходе схемы сравнения -15 появляется сигнал положительного знака, .который через схему сравнения 16 и схему сложения 18 поступает на вход управления дроссельного распределителя 9, соединяя нижнюю полость мультипликатора 5 с источником высокого давления. Нижняя полость мультипликатора 4 при этом соединяется со сливом, В результате также происходит уменьшение перекоса. Регулируя величину сигнала на выходе датчиков перемещения 12 и 13, можно добиться полного устранения перекоса подвижной траверсы гидравлического пресса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система синхронизации движения траверсы гидравлического пресса | 1989 |
|
SU1648796A1 |
| Система синхронизации движения траверсы гидравлического пресса | 1987 |
|
SU1447698A1 |
| Система синхронизации движения траверсы гидравлического пресса | 1988 |
|
SU1574482A1 |
| Состема синхронизации движения траверсы гидравлического персса | 1974 |
|
SU497172A1 |
| Система синхронизации движения подвижной траверсы вертикального гидравлического пресса | 1983 |
|
SU1134377A1 |
| Система синхронизации движения траверсы гидравлического пресса | 1975 |
|
SU563305A1 |
| Гидравлический пресс | 1990 |
|
SU1761549A1 |
| Гидравлический вырубной пресс | 1984 |
|
SU1224182A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПРОЦЕССА ЗАПРЕССОВКИ ПРИ ПОЛУЧЕНИИ ПРЕССОВОГО СОЕДИНЕНИЯ ОБЪЕКТОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 2007 |
|
RU2351450C1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС | 2010 |
|
RU2461462C2 |
