1
Изобретение относится к области подьёмйотранспортного машиностроения.
Известно устройство управления приводом грузоподъемного механизма, содержащее приводной электродвигатель, расположенный на неподвижном основании, тормоз с электрогидротолкателем, аппарат управления с контактами подъема и спуска, контактор электрогидротолкателя и контакторы подъема и спуска, катушки последних включены через собственный замыкающий контакт управления, параллельно которому включен соответствующий контакт аппарата управления, а электрогидротолкатель через контакты контактора электрогидротолкателя подключен параллельно приводному электродвигателю, который связан с источником питания через контакты контакторов подъема и спуска 1.
Недостатком известного устройства является сравнительно низкая точность остановки грузоподъемного механизма, вызванная большим временем срабатывания тормозного устройства с электрогидротолкателем, приводящая к просадке груза.
Целью изобретения является повышение точности остановки грузоподъемного механизма.
Это достигается тем, что предложенное устройство снабжено датчиком перемещения, реле с замыкающим контактом, а также сегментообразньш подвижным основанием с пружинами и катками, причем на подвижном основании закреплен подвижный элемент датчика перемещения и установлен тормоз с электрогидротолкателем, а само подвижное основание расположено на катках и связано пружинами с неподвижным основанием, на котором закреплен датчик перемещения, при этом реле подключено к датчику перемещения, а замыкающий контакт реле включен последовательно с замыкающими контактами управления контактов подъема и спуска.
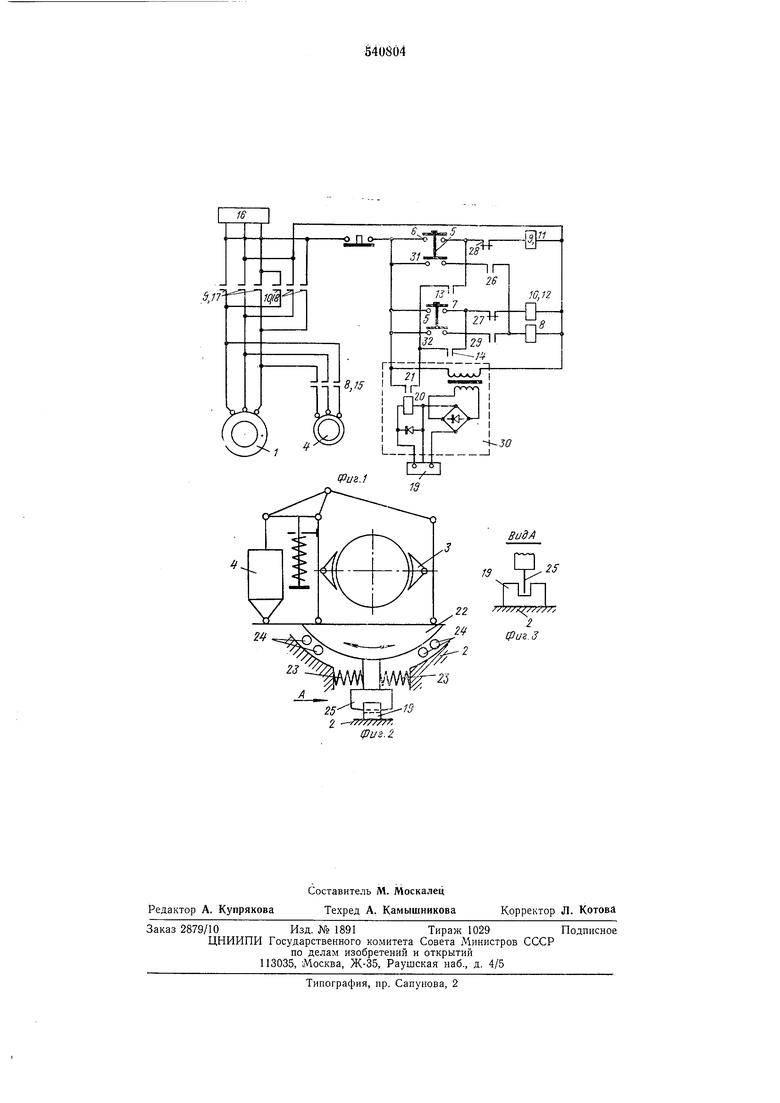
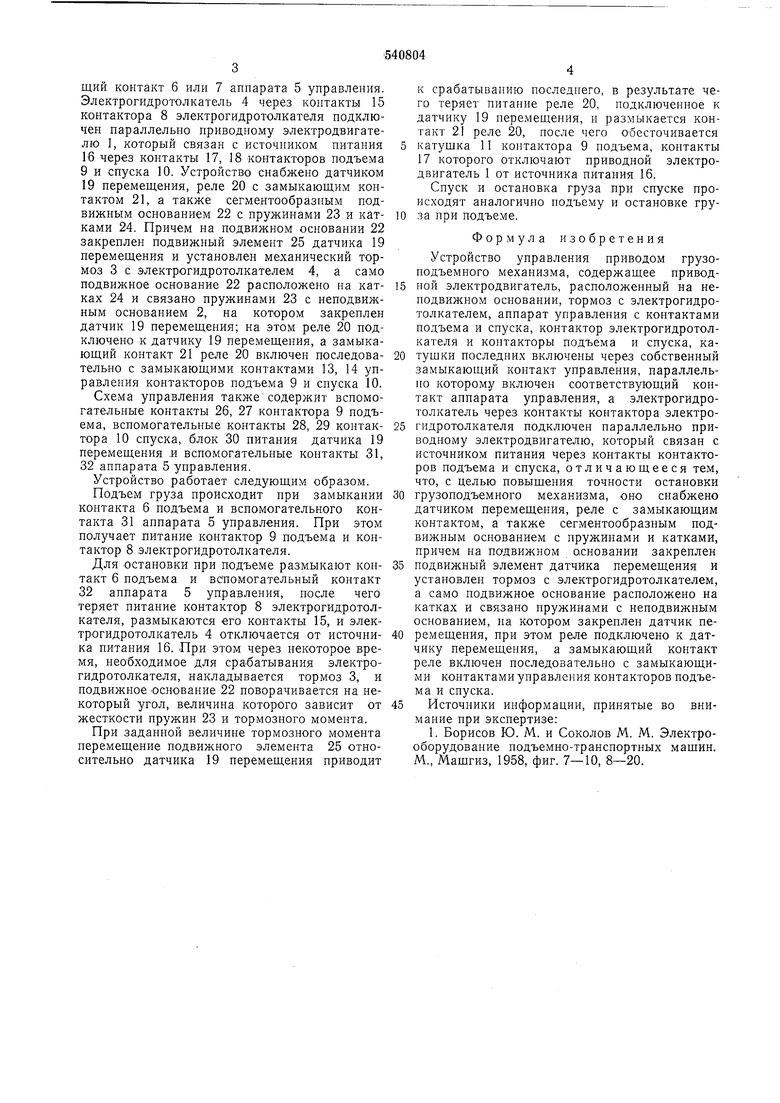
На фиг. 1 изображена электрическая схема устройства управления приводом грузоподъемного механизма; на фиг. 2 - тормоз с электрогидротолкателем, установленным на подвижном основании, общий вид; на фиг. 3 - вид по стрелке А на фиг. 2. Устройство управления приводом грузоподъемного механизма содержит приводной электродвигатель 1, расположенный на неподвижном основании 2, тормоз 3 с электрогидротолкателем 4, аппарат 5 управления с контактами подъема 6 и спуска 7, контактор
8 электрогидротолкателя и контакторы подъема 9 и спуска 10.
Катушки 11, 12 контакторов подъема 9 и спуска 10 включены через собственный замыкающий контакт 13 или 14 управления, параллельно которому включен соответствующий контакт 6 или 7 аппарата 5 управления. Электрогидротолкатель 4 через контакты 15 контактора 8 электрогидротолкателя подключен параллельно приводному электродвигателю 1, который связан с источником питания 16 через контакты 17, 18 контакторов подъема 9 и спуска 10. Устройство снабжено датчиком 19 перемещения, реле 20 с замыкающим контактом 21, а также сегментообразным подвижным основанием 22 с пружинами 23 и катками 24. Причем на подвижном основании 22 закреплен подвижный элемент 25 датчика 19 перемещения и установлен механический тормоз 3 с электрогидротолкателем 4, а само подвижное основание 22 расположено на катках 24 и связано пружинами 23 с неподвижным основанием 2, на котором закреплен датчик 19 перемещения; на этом реле 20 подключено к датчику 19 перемещения, а замыкающий контакт 21 реле 20 включен последовательно с замыкающими контактами 13, 14 управления контакторов подъема 9 и спуска 10.
Схема управления также содержит вспомогательные контакты 26, 27 контактора 9 подъема, вспомогательные контакты 28, 29 контактора 10 спуска, блок 30 питания датчика 19 перемещения .и вспомогательные контакты 31, 32 аппарата 5 управления.
Устройство работает следующим образом.
Подъем груза происходит при замыкании контакта 6 подъема и вспомогательного контакта 31 аппарата 5 управления. При этом получает питание контактор 9 подъема и контактор 8 электрогидротолкателя.
Для остановки при подъеме размыкают контакт 6 подъема и вспомогательный контакт 32 аппарата 5 управления, после чего теряет питание контактор 8 электрогидротолкателя, размыкаются его контакты 15, и электрогидротолкатель 4 отключается от источника питания 16. При этом через некоторое время, необходимое для срабатывания электрогидротолкателя, накладывается тормоз 3, и подвижное основание 22 поворачивается на некоторый угол, величина которого зависит от жесткости пружин 23 и тормозного момента.
При заданной величине тормозного момента перемещение подвижного элемента 25 относительно датчика 19 перемещения приводит
к срабатыванию последнего, в результате чего теряет питание реле 20, подключенное к датчику 19 перемещения, и размыкается контакт 21 реле 20, после чего обесточивается катушка 11 контактора 9 подъема, контакты 17 которого отключают приводной электродвигатель 1 от источника питания 16.
Спуск и остановка груза при спуске происходят аналогично подъему и остановке груза при подъеме.
Формула изобретения
Устройство управления приводом грузоподъемного механизма, содержащее приводной электродвигатель, расположенный на неподвижном основании, тормоз с электрогидротолкателем, аппарат управления с контактами подъема и спуска, контактор электрогидротолкателя и контакторы подъема и спуска, катушки последних включены через собственный замыкающий контакт управления, параллельно которому включен соответствующий контакт аппарата управления, а электрогидротолкатель через контакты контактора электрогидротолкателя подключен параллельно приводному электродвигателю, который связан с источником питания через контакты контакторов подъема и спуска, отличающееся тем, что, с целью повышения точности остановки грузоподъемного механизма, оно снабжено датчиком перемещения, реле с замыкающим контактом, а также сегментообразным подвижным основанием с пружинами и катками, причем на подвижном о,сновании закреплен подвижный элемент датчика перемещения и установлен тормоз с электрогидротолкателем, а само подвижное основание расположено на катках и связано пружинами с неподвижным основанием, на котором закреплен датчик перемещения, при этом реле подключено к датчику перемещения, а замыкающий контакт реле включен последовательно с замыкающими контактами управления контакторов подъема и спуска.
Источники информации, принятые во внимание при экспертизе:
1. Борисов Ю. М. и Соколов М. М. Электрооборудование подъемно-транспортных мащин. М., Мащгиз, 1958, фиг. 7-10, 8-20.
Z3
25
2 ,
(pus. 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для торможения асинхронного электродвигателя | 1982 |
|
SU1086532A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| Устройство для управления грузоподъемным механизмом | 1985 |
|
SU1384538A1 |
| Подвесная люлька | 1979 |
|
SU815224A1 |
| Устройство для управления двигателями кабельной и грузовой лебедок крана | 1988 |
|
SU1594121A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| ТРОЛЛЕЙБУС С ЧАСТИЧНОЙ НЕЗАВИСИМОСТЬЮ ОТ КОНТАКТНОЙ СЕТИ | 2012 |
|
RU2493027C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНОЙ МАШИНОЙ | 1996 |
|
RU2112735C1 |