0UZ,l
Изобретение относится к подъемно-трянс- портному оборудованию, а именно к устройствам для упрявлсния лeбeдкa fи крана.
Цель изобретения - повышение надежности.
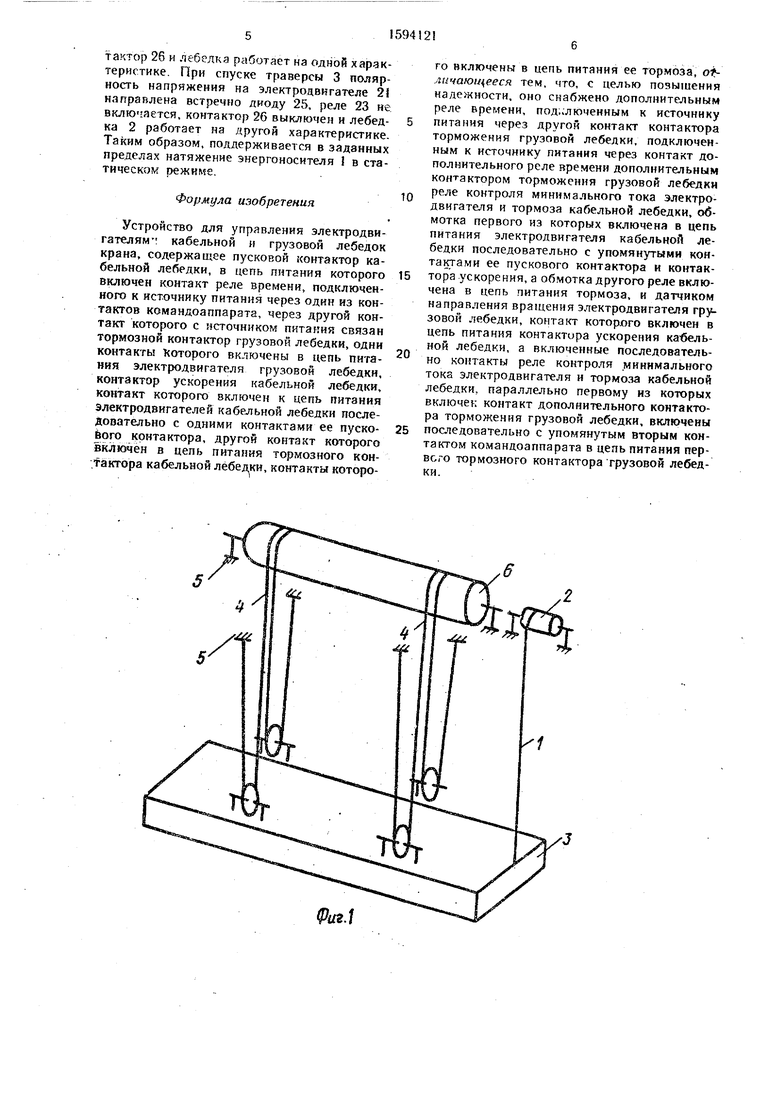
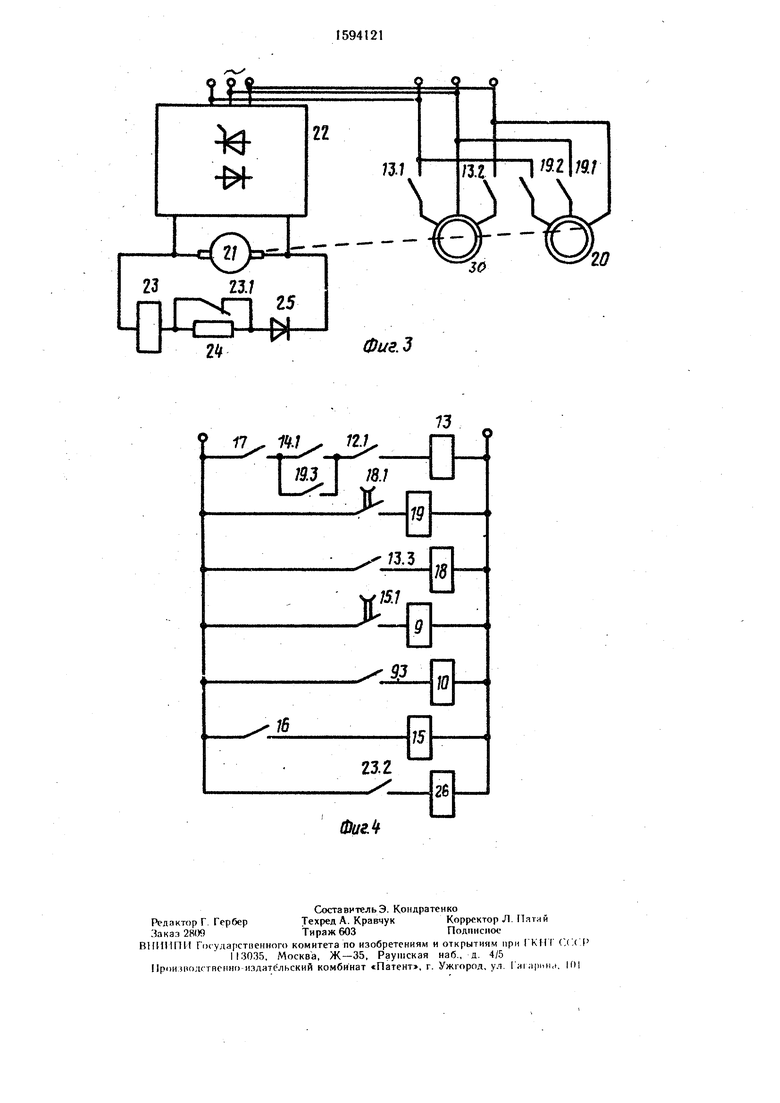
На фиг. 1 изображено устройство, общий вид; на фиг. 2 -- принципиальная схема включения электродвигателя кабельной лебедки; на фиг. 3 - принципиальная схема включения электродвигателя грузовой лебедки; на фиг. 4 - принципиальная схема управления лебедками.
Устройство содержит гибкий энергоноситель, например электрический кабель , один конец которого намотан на барабан кабельной лебедки 2 и соединен через токосъемник с источником питания, а другой механически закреплен на подвижном объекте, например на грузозахватной траверсе 3, и электрически связан с потребителем энергии, например с электродвигателем спредера. Грузозахватная траверса 3 подвешена на канатах 4, одни концы которых закреплены на основании 5 грузовой тележки, а другие - на барабане грузовой лебедки 6, установленной вместе с лебедкой 2 на octfo- вании 5.
Электродвигатель 7 постоянного тока кабельной лебедки 2 выполнен с обмотками 8 смешанного и независимого возбуждения. Устройство содержит также пусковой контактор 9 с контактами 9.1, 9.2 и 9.3, включенными в цепь питания электродвигателя 7 кабельной лебедки и в цепь питания тормозного контактора 10, контакты 10.1 и 0.2 которого включены в цепь питания.
Тормоз II кабельной лебедки, в цепь питания которой включено реле 12 контроля минимального тока тормоза, кабельной лебедки с контактом 12.1, включенным в цепь питания тормозного контактора 13 грузовой лебедки, контакты 13.1, 13.2 и 13.3 которого включены в цепь питания электродвигателя механического тормоза грузовой лебедки. в цепь питания электродвигателя 7 кабельной лебедки включено реле 14 контроля минимального тока электродвигателя 7 кабельной лебедки с контактом 14.1. Устройство содержит также реле 15 времени с контактом 15.1, в цепь питания которого включен контакт 16 командоаппарата, другой контакт 17 которого включен в цепь питания контактора 13, дополнительное реле 18 времени с контактом 18.1, включенным в цепь питания дополнительного контактора 19 торможения грузовой лебедки с контактами Ш.1, 19.2 и 19.3, последние из которых включены в цепь питания другого электродв1 гателя 20 механического тормоза грузовой лебедки, а к электродвигателю 21 грузовой лебедки, подключенному к тиристорному преобразователю 22. подключен датчик направления вращения электродвигателя грузовой лебедки, имеющей реле 23 с контактами 23.1 и 23.2, резистор 24 и диод 25, причем контакт
23.2 включен в цепь питания контактора 26 ускорения кабельной лебедки с контактом 26.1. В цепь питания электродвигателя 7 и обмотки 8 включены резистор 27 и пуско- 5 тормозные резисторы 28 и 29.
Устройство работает следующим образом.
При включении грузовой лебедки в сторону подъем траверсы 3 замыкается контакт 16 командоаппарата, включается реле 5, замыкается его контакт 15.1 в цепи контактора 9, при этом замыкаются контакты 9.1 и электродвигатель 7 подключается к источнику. Одновременно контакт 9.3 включает тормозной контактор 10, контакт 10.1 кото- 15 рого подключает к источнику тормоза 11 лебедки 2. После подключения электродвигателя 7 к источнику размыкания колодок механического тормоза лебедки 2. включаются реле 14 и 12 минимального тока и замы- каются их контакты 14.1 и 12.1 в цепи контактора 13, который через контакт 17 комаи-. доаппарата включается, замыкаются его контакты J3.1 и 13:3, включается реле 8 и его контакт 18.1 включает контактор 19. Через контакты 13.1, 13.2 и 19.1, 19.2 получают 25 питание электродвигатели 30 и 20 механических тормозов грузовой лебедки 6, колодки тормозов размыкаются. После включения контактора 13 получает питание задатчик скорости грузовой лебедки, лебедка 6 разгоняется до установившейся скорости. 30 К моменту включения лебедки 6 кабельная лебедка 2 расторможена, электродвигатель 7 имеет момент, гибкий энергоноситель 1 натянут, что обеспечивается включением лебедки 6 только после включения реле 14 и 12 минимального тока, контролирующих растор- 35 маживание механического тормоза и наличие момента электродвигателя 7.
При остановке лебедки размыкаются контакты 16 и 17 командоаппарата, контактор J3 размыкает контакты 13.1 и 13.2, и один Q из тормозов лебедки 6 размыкается. Другой тормоз лебедки 6 разомкнется с выдержкой времени реле 18. Лебедка 2 продолжает ра- бо тать, обеспечивая заданное натяжение в энергоносителе I. После отйадания реле 15 времени отключается контактор 9 и тормоз- 5 ной контактор 10, лебедка 2 останавливается. При остановке лебедки 6 устройство обеспечивает поочередное замыкание механических тормозов грузовой лебедки, что снижает динамические нагрузки в гибком энергоносителе 1, при этом сначала останав- 0 ливается грузовая лебедка 6, а затем кабельная лебедка 2, что обеспечивает заданное натяжение энергоносителя 1 и исключение- его запутывания.
Натяжение энергоносителя I в заданных пределах обеспечивается также наличием двух механических характеристик лебедки 2. При подъеме траверсы 3 напряжение на электродвигателе 2 грузовой лебедки 6 включает реле 23, при этом включается контактор 26 и лебелка работает на одной характеристике. При спуске траверсы 3 полярность напряжения на электродвигателе 21 направлена встречно диоду 25 реле 23 не включается, контактор 26 выключен и лебед- ка 2 работает на другой характеристике 1аким образом, поддерживается в заданных пределах натяжение энергоносителя I в статическом режиме.
Формула изобретения
Устройство для управления электродвигателям- кабельной и грузовой лебедок крана содержащее пусковой контактор кабельной лебедки, в цепь питания которого включен контакт реле времени, подключенного к источнику питания через один из контактов командоаппарата, через другой контакт которого с источником питания связан тормозной контактор грузовой лебедки однн контакты Которого включены в цепь питания электродвигателя грузовой лебедки контактор ускорения кабельной лебедки контакт которого включен к цепь питания электродвигателей кабельной лебедки последовательно с одними контактами ее пускового контактора, другой контакт которого включен в цепь питания тормозного кон- .тактора кабельной лебед ки, контакты которо
5
5
0
5
го включены в цепь питания ее тормоза, oiS личающееся тем. что, с целью повышения надежности, оно снабжено дополнительным реле врег,тени, под,;лючекным к источнику питания через другой контакт контактора торможения грузовой лебедки, подключенным к источнику питания через контакт дополнительного реле времени дополнительным контактором торможения грузовой лебедки реле контроля минимального тока электродвигателя и тормоза кабельной лебедки обмотка первого из которых включена в цепь питания электродвигателя кабельной лебедки последовательно с упомянутыми контактами ее пускового контактора и контактора ускорения, а обмотка другого реле включена в цепь питания тормоза, и датчиком направления вращения электродвигателя грузовой лебедки, контакт котор.ого включен в цепь питания контактора ускорения кабельной лебедки, а включенные последовательно контакты реле контроля минимального тока электродвигателя и тормоза кабельной лебедки, параллельно первому нз которых включен контакт дополнительного контактора торможения грузовой лебедки, включены последовательно с упомянутым вторым контактом командоаппарата в цепь питания первого тормозного контактора грузовой лебед- ки,
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
| Устройство для управления грузоподъемным механизмом | 1985 |
|
SU1384538A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Устройство для управления лебедкой | 1981 |
|
SU992408A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЭЛЕКТРООБОРУДОВАНИЯ ВАГОНА МЕТРОПОЛИТЕНА | 1990 |
|
RU2022823C1 |
| Устройство позиционирования револьверной головки металлорежущего станка | 1990 |
|
SU1812059A1 |
| Устройство для дистанционного управления передвижным объектом | 1989 |
|
SU1576340A1 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ ЭЛЕКТРОДВИГАТЕЛЯ КОМПРЕССОРА ТЕПЛОВОЗА | 1992 |
|
RU2067052C1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам для управления лебедками крана. Цель изобретения - повышение надежности. При включении устройства сначала включается электродвигатель кабельной лебедки, а затем включается тормоз 11 и только потом после включения реле 12 и 14 контроля минимального тока электродвигателя 7 кабельной лебедки и тормоза 11 кабельной лебедки включается грузовая лебедка. Отключение происходит в обратном порядке. 4 ил.
Фиг.
Фи5.3
| Богословский А.П | |||
| и др | |||
| Судовые электроприводы | |||
| Т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ отковки в штампах заготовок для спиральных сверл | 1921 |
|
SU367A1 |
