13, образуя друг с другом (две пары силовых звеньев 5, 6 и две пары выправляющих рычагов 11, 12) два механизма типа «нюрнбергC Q X НОЖПИЦ.
Шарпирпое прикрепление выправляюп1их рычагов к вертикальпым двустворчатым силовым звеньям позволяет использовать силовые звенья в качестве кинематических пар.
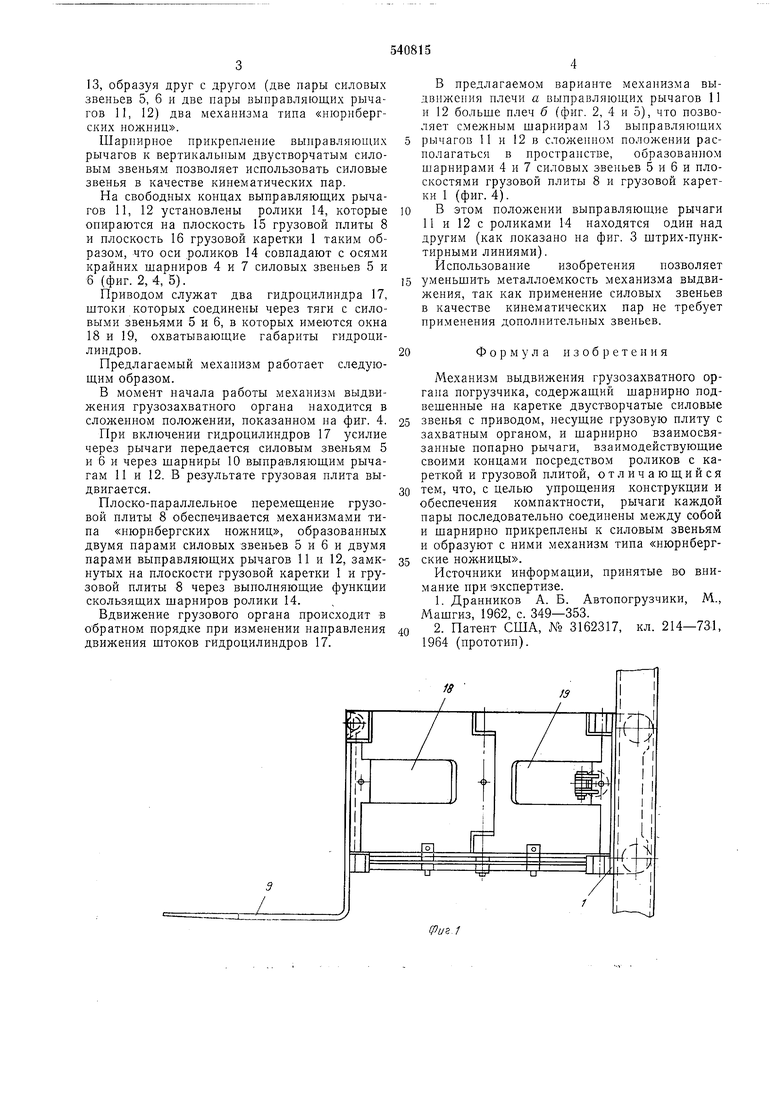
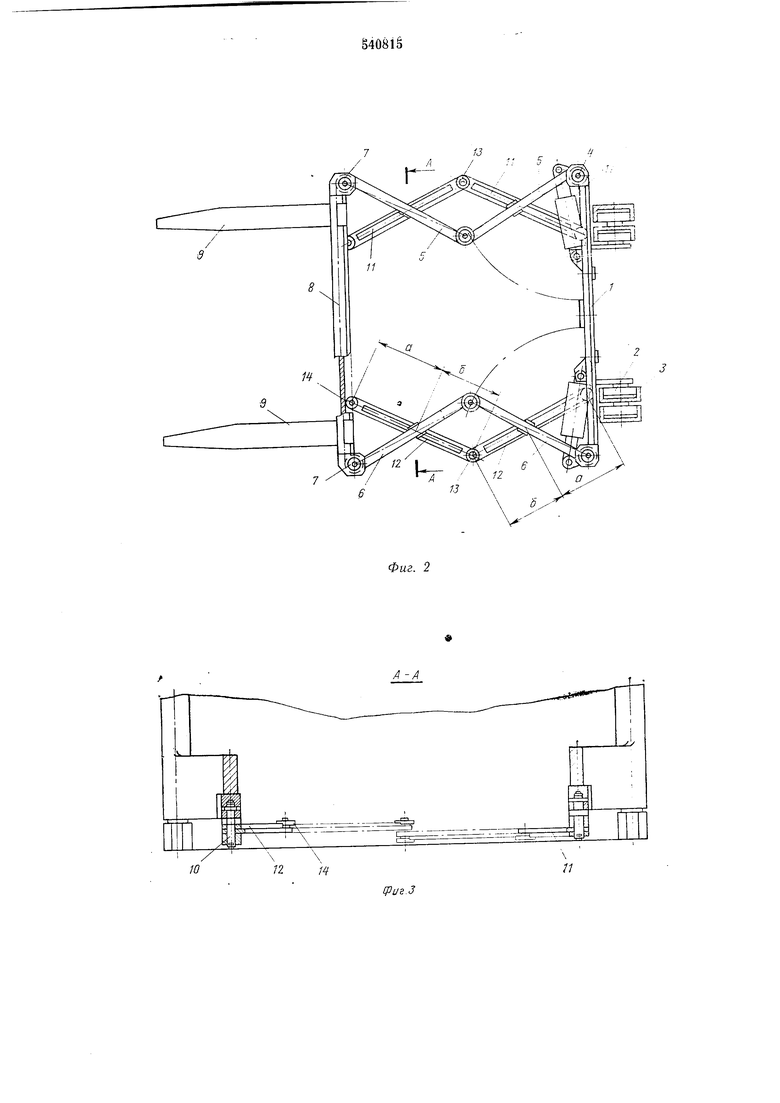
На свободных концах выправляющих рычагов 11, 12 установлены ролики 14, которые опираются на плоскость 15 грузовой плиты 8 и плоскость 16 грузовой каретки 1 таким образом, что оси роликоВ 14 совпадают с осями крайних щарниров 4 и 7 силовых звеньев 5 и 6 (фиг. 2,4, 5).
Приводом служат два гидроцилиндра 17, штоки которых соединены через тяги с силовыми звеньями 5 и 6, в которых имеются окна 18 и 19, охватывающие габариты гидроцилиндров.
Предлагаемый механизм работает следующим образом.
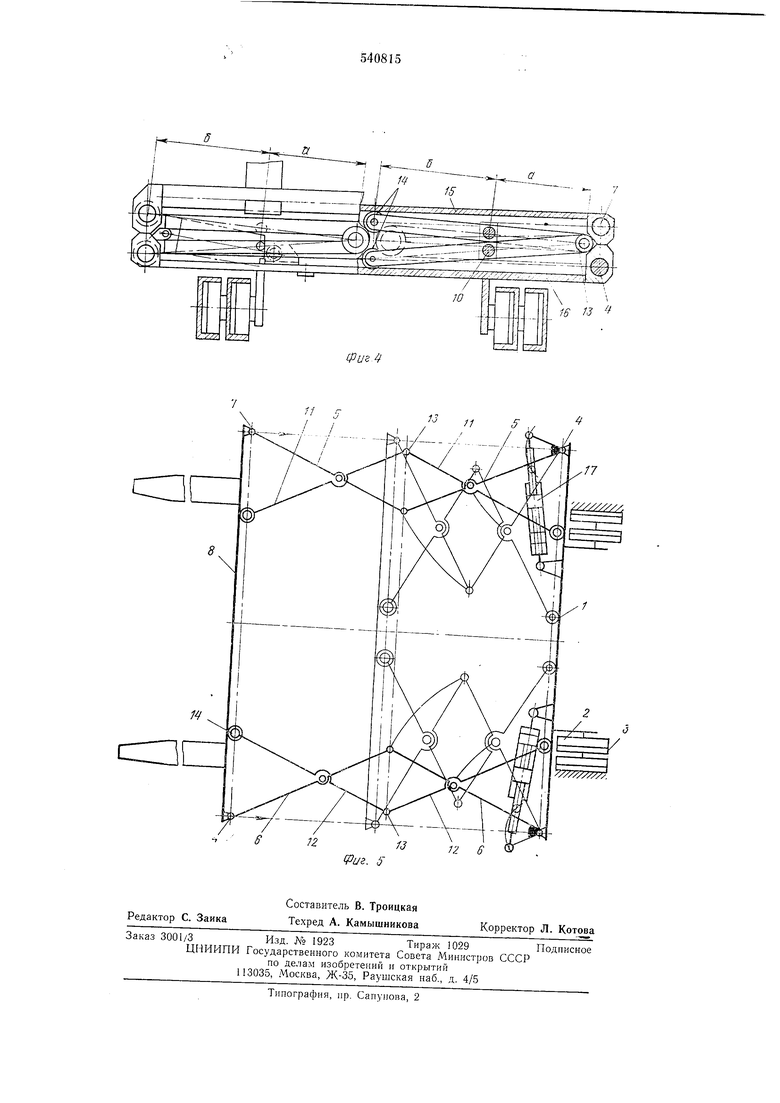
В момент начала работы механизм выдвижения грузозахватного органа находится в сложенном положении, показанном па фиг. 4.
При включении гидроцилиндров 17 усилие через рычаги передается силовым звеньям 5 и 6 и через шарниры 10 выправляющим рычагам 11 и 12. В результате грузовая плита выдвигается.
Плоско-параллельное перемещение грузовой плиты 8 обеспечивается механизмами типа «нюрнбергских ножниц, образованных двумя парами силовых звеньев 5 и 6 и двумя парами выправляющих рычагов 11 и 12, замкнутых на плоскости грузовой каретки 1 и грузовой плиты 8 через выполняющие функции скользящих шарниров ролики 14.
Вдвижение грузового органа происходит в обратном порядке при изменении направления движения штоков гидроцилиндров 17.
В предлагаемом варианте механизма выдвижения плечи а выправляющих рычагов 11 и 12 больше плеч б (фиг. 2, 4 и 5), что позволяет смежным шарнирам 13 выправляющих
рычагов II и 12 в сложенном положении располагаться в пространстве, образован юм шарнирами 4 и 7 силовых звеньев 5 и 6 и плоскостями грузовой плиты 8 и грузовой каретки 1 (фиг. 4).
В этом положении выправляющие рычаги
11 и 12 с роликами 14 находятся один над
другим (как показано на фиг. 3 щтрих-пунктирными линиями).
Использование изобретения позволяет
уменьшить металлоемкость механизма выдвижения, так как применение силовых звеньев в качестве кинематических пар не требует применения дополнительных звеньев.
Формула изобретения
Механизм выдвижения грузозахватного органа погрузчика, содержащий шарнирно подвешенные на каретке двустворчатые силовые звенья с приводом, несущие грузовую плиту с захватным органом, и шарнирно взаимосвязанные попарно рычаги, взаимодействующие своими концами посредством роликов е кареткой и грузовой плитой, отличающийся тем, что, с целью упрощения конструкции и обеспечения компактности, рычаги каждой пары последовательно соединены между собой и шарнирно прикреплены к силовым звеньям и образуют с ними механизм типа «нюрнбергские нож.ницы.
Источники информации, принятые во внимание при экспертизе.
1 Дранников А. Б. Автопогрузчики, М., Машгиз, 1962, с. 349-353.
2. Патент США, № 3162317, кл. 214-731, 1964 (прототип).
/
i
/
Я Ш
JoL
-%ь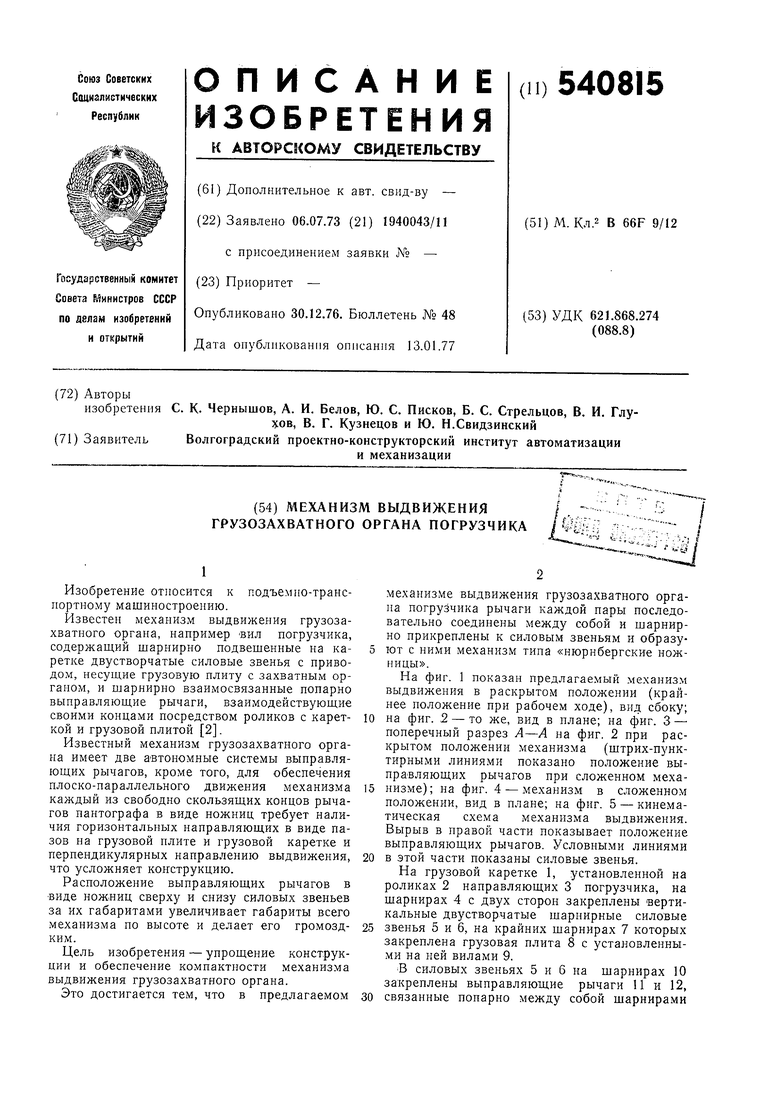
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2342312C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381985C1 |
| Шасси транспортного средства дляпЕРЕВОзКи длиННОМЕРНыХ гРузОВ | 1979 |
|
SU839784A1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Контейнеровоз | 1986 |
|
SU1418121A1 |
| Путеукладчик А.М.Тройникова | 1988 |
|
SU1587099A1 |
Фиг. 2
