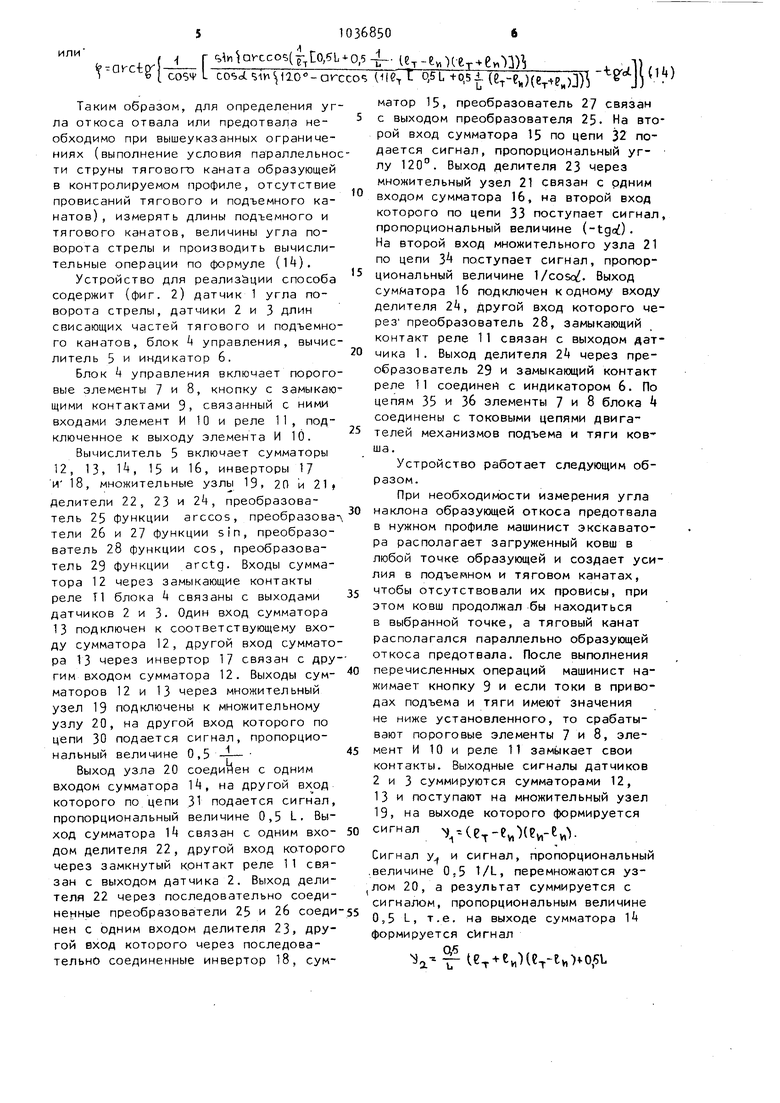
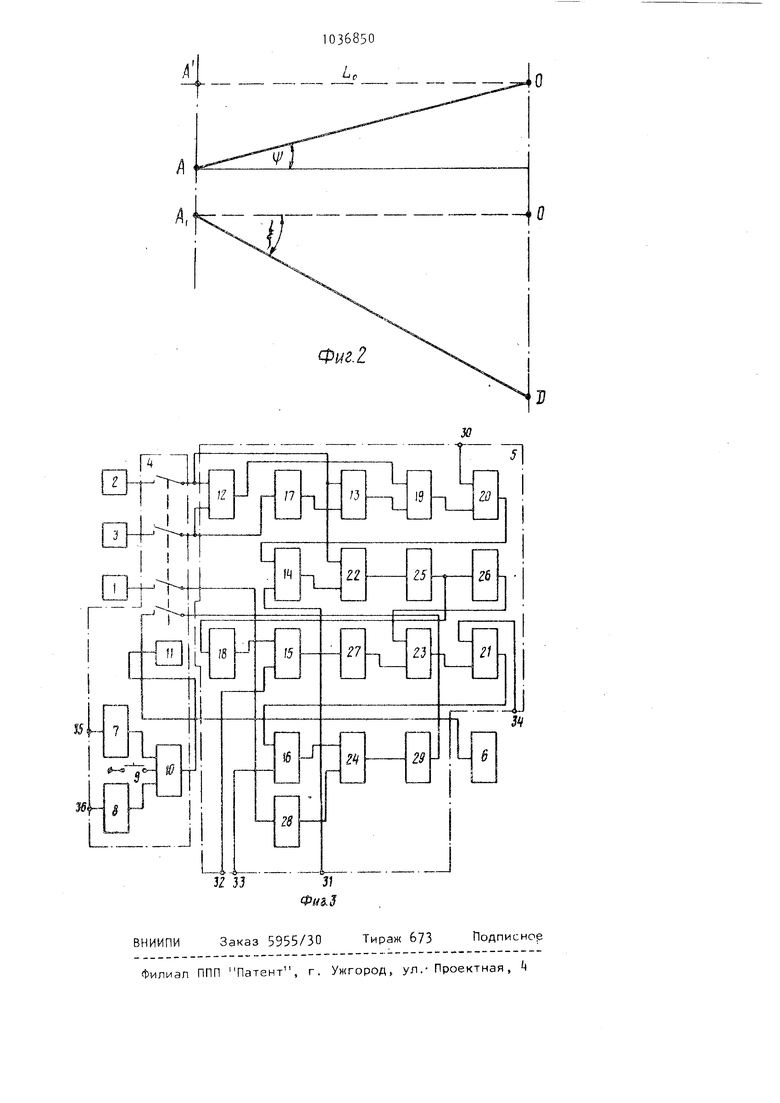
Изобретение относится к области измерения параметров выполненной работы при проведении открытых горных работ с применением экскаваторовдраглайнов и, более точно, для,оценки фактических значений одного из важных параметров - угла откоса отвала и предотвала, Известны различные способы и устройства, реализующие эти способы, предназначенные для измерения napai r роа работы экскаватора-драглайна tO 2, . Известен способ измерения углов откоса отвала и предотвала при .многократной перевалке вскрышных пород, предусматривающий проведение макшейдерской инструментальной съемки tSlОднако этот способ трудоемок и тре бует значительного времени при его использовании, в связи с чем применяется эпизодически при контроле параметров паспорта экскавации, В то же время экскаваторщику необходимо иметь оперативную информацию о величине у откоса отвала, предотвала, чтобы обеспечить выполнение заданного значения угла, BaiKHocTb оперативного фор мирования указанной информации для машиниста экскаватора обуславливается тем, что нарушение заданного угла откоса отвала, предотвала приводит к нарушению параметров технологической схемы, которое, в свою очередь, связано с дополнительными экскаваторными работами. Наиболее близким к изобретению по технической сущности является способ, включающий измерение длин тягового -orcitri Г5 у1аУССое(тг cosHl co5 i-5iHlno-Q где ci-const - угол неклена стрелы экскаватора к горизонту L-const - расстояние между точками схода тягового и подъемного канатов с направляющих шкивов; длины смотанных частей подъемного и тягового каната; Ч угол поворота стрелы экскаватора от ее перпендикулярного направления к продольной бровке уступа. При этом значения токов якорных частей цепей двигателей механизма и подъемного канатов, тока якорной цепи двигателя механизма подъема ковша, угла поворота платформы экскаватора, контроль операций разгрузки ковша и сравнение текущих длин тягового и подъемного канатов с установленными величинами. Способ позволяет учитывать основные показатели работы драглайна L6 }. Однако известный способ не позволяет оперативно формировать информацию о величине угла откоса отвала и предотвала при использований экскё ватора на вскрышных работах по бестранспортной схеме и поэтому не обеспечивает эффективных технологических режимов работы экскаватора. Целью изобретения является повышение точности учета работы экcкaвatoра за счет оперативного формирования информации о фактических значениях углов откоса отвала или предотвала. Поставленная цель достигается тем, что измеряют угол поворота стрелы экскаватора от ее перпендикулярного направления к продольной бровке уступа и ток якорной цепи привода механизма тяги ковша, а измерение.длин тягового и подъемного канатов производят при значениях тока приводов механизмов тяги и подъема ковша, равных заданным и пропорциональных допустимым провисаниям тягового и подъемного канатов, при этом тяговый канат располагают параллельно образующей от.коса и определяют угол откоса отвала или предотвала в зоне расположения ковша по следующей формуле .-Ь-Сет-е.кетН„)3) ,5UfO,6(,)(eT.4eH)3)i подъема ковша (9п) и механизма тяги (3fli- ) задают в зависимости от экскаватора в пределах о, о л -jtfOM и ,t - gгдеЭ;ТТ «ОМ номинальные значения токов двигателей. На фиг. 1 и 2 показана схема взаимного расположения элементов конструкций экскаватора, забоя, отвала и измеряемые параметры на фиг. 3 функциональная схема устройства, реализующего способ. Сущность способа состоит в следующем. 31036850 Для определения угла откоса отвала в точке, принадлежащей пряюй перпен- . дикулярной бровке уступа и образующей поверхность отвала в данном сечении, располагают загруженный ковш. Затем 5 производят выбор провисаний тягового и подъемного канатов путем создания соответствующих моментов на валах . приводных двигателей механизмов тяги и подъема ковша, при этом тяговый канат располагают параллельно плоскости откоса, включающей указанную выше прямую. При одновременном достижении установленных значений токов в якорных цепях соответствующих двигателей, т.е. - -./ЛАНОМ т 7/оЪЗ ° определяют длины свисающих с направ-ляющих шкивов мастей тягового 6 и подъемного &у, канатов и угол ц). поворота стрелы экскаватора от ее перпендикулярного направления к продольной бровке уйтупа и по формуле (I) определяют угол откоса отвала в указанном выше сечении. При этом учитывается, что cC-const и ее величина указана в паспорте экскаватора или документации по наладке экскава- 30 тора, L-(const) берется из конструкторской документации экскаватора, угол Ч может изменяться в пределах от О до , а угол 3 между прямой, соединяющей точки схода подъемного и тягового канатов с направляющих шкивов, и струной тягового каната находится в пределах . Геометрические соотношения, используемые в способе, следующие: из треугольника АВД (фиг. 2а) следует COST- -- 2ьетили после преобразования С05Г- )(Ст-еи) C09f -jj- -,, - o,gb40,e гсет- еиме-т-еи) BT ,,б-(гт-еу,)(€т+&и) - расстояние между точками схода подъемного (точка В) и тягового (точка А) канатов с направляющих шкивов; 5 10 в в (фи от Из но пр гд ко и са уг ле из ко Ц чи из То Г и, tj - ДЛИНЫ свисакнцих частей подъемного и тягового канатов; 0 - угол наклона линии АВ к горизонту; У - угол между линией АВ и струной тягового каната (линией АД). з треугольника АВД, построенного ртикальной плоскости стрелы . 1а) следует Г 120 - Г (t) Н sinT(г 10- --;- : уда ц - I треугольника АВО следует ОВ sin d Д-OB L-sinei, тогда h H -Д -L-sinc :. stnt; этом АО LO LCOS об, ТГ угол между вертикалью,опущенной из точки схода подъемного каната (точка В) и струной тягового каната; Н - высота отвеса подъемного каната до его пересечения с линией откоса (сторона ВД треугольника АВД); LQ - проекция стороны АВ треугольника АВД на горизонтальной плоскости. Отметим, что вертикальная плость стрелы в процессе экскавации ри проведении измерения угла откопредотвала может находиться под ом if от перпендикулярного направия к бровке уступа (фиг.16). Угол откоса предотвала должен е| яться в перпендикулярной плости к бровке уступа, поэтому угол олжен быть учтен, что и обеспеается следующим образом (фиг.16) треугольника ААО следует L, АО L cosif(10) Lcosofcos Ч да из треугольника АОД (фиг.Чв) fe- - aJ UQ l-COeoL COS4 -1 г в1ИТч,,,,4 ,co54Lsiv,rcoScL 2 fJ -° ч|-сБ чГ , р и1а ссоЧг,,54-1ет-е,).Шtcrj.1hiM
e: cos4L со-ь- - иоо-агссо ОТё t o,5L to.si {ё;-е)()3)5 Таким образом, для определения угла откоса отвала или предотвала необходимо при вышеуказанных ограничениях (выполнение условия параллельное ти струны тягового каната образующей в контролируемом профиле, отсутствие прови-саний тягового и подъемного канатов) , измерять длины подъемного и тягового канатов, величины угла поворота стрелы и производить вычислительные операции по формуле (It). Устройство для реализации способа содержит (фиг. 2) датчик 1 угла поворота стрелы, датчики 2 и 3 длин свисающих частей тягового и подъемно го канатов, блок А управления, вычис литель 5 и индикатор 6. Блок k управления включает порого вые элементы 7 и 8, кнопку с замыкаю щими контактами 9, связанный с ними входами элемент И 10 и реле 11, подключенное к выходу элемента И 10. Вычислитель 5 включает сумматоры 12, 13, 1, 5 и 16, инверторы 17 И 18, множительные узль: 19, 20 и 21 делители 22, 23 и 2, преобразователь 25 функции arccos, преобразова тели 26 и 27 функции sin, преобразователь 28 функции cos, преобразователь 29 функции .arctg. Входы сумматора 12 через замыкающие контакты реле Т1 блока А связаны с выходами датчиков 2 и 3. Один вход сумматора 13 подключен к соответствующему входу сумматора 12, другой вход суммато ра 13 через инвертор 17 связан с дру гим входом сумматора 12. Выходы сумматоров 12 и 13 через множительный узел 19 подключены к множительному узлу 20, на другой вход которого по цепи 30 подается сигнал, пропорциональный величине 0,5 -р- Выход узла 20 соединен с одним входом сумматора lA, на другой которого по цепи 3 подается сигнал, пропорциональный величине 0,5 L, Выход сумматора И связан с одним вхо дом делителя 22, другой вход которог через замкнутый контакт реле 11 связан с выходом датчика 2. Выход делителя 22 через последовательно соединенные преобразователи 25 и 2б соеди нен с одним входом делителя 23, ДРУгой вход которого через последовательнО соединенные инвертор 18, сумматор 15, преобразователь 27 связан с выходом преобразователя 25. На второй вход сумматора 15 по цепи 32 подается сигнал, пропорциональный yi- лу 120°. Выход делителя 23 через множительный узел 21 связан с рдним входом сумматора 16, на второй вход которого по цепи 33 поступает сигнал, пропорциональный величине (tgai) . На второй вход множительного узла 21 по цепи 3 поступает сигнал, пропорциональный величине 1/cosa. Выход сумматора 6 подключен кодному входу делителя 2ч, Другой вход которого через преобразователь 28, замыкающий контакт реле 11 связан с выходом датчика 1. Выход делителя 2 через преобразователь 29 и замыкающий контакт реле 11 соединей с индикатором 6. По цепям 35 и Зб элементы 7 и 8 блока 4 соединены с токовыми цепями двигателей механизмов подъема и тяги ковша. Устройство работает следующим образом. При необходимости измерения угла наклона образующей откоса предотвала в нужном профиле машинист экскаватора располагает загруженный ковш в любой точке образующей и создает усилия в подъемном и тяговом канатах, чтобы отсутствовали их провисы, при этом ковш продолжал бы находиться в выбранной точке, а тяговый канат располагался параллельно образующей откоса предотвала. После выполнения перечисленных операций машинист нажимает кнопку 9 и если токи в приводах подъема и тяги имеют значения не ниже установленного, то срабатывают пороговые элементы 7 и 8, элемент И 10 и реле 11 замыкает свои контакты. Выходные сигналы датчиков 2 и 3 суммируются сумматорами 12, 13 и поступают на множительный узел 19, на выходе которого формируется сигнал )--(,)( Сигнал у и сигнал, пропорциональный .величине 0.5 1/L, перемножаются узлом 20, а результат суммируется с сигналом, пропорциональным величине Q L, т.е. на выходе сумматора 1 формируется cV1гнaл Q 2. - (€ + Ец)()0, 7 Далее, сигнал у пост: пает на делитель 22, с выхода которого частное от деления у на B-j- поступает на преобразователь 25. После преобразо вания входной величины на выходе преобразователя формируется сигнал Г-агссо Т о.. Затем преобразователем 26 обеспечивается нахождение sirry, сумматором 15 обеспечивается формирование сигналау 120 -7 Преобразователь 27 обеспечивает нахождение S in(), на выходе делителя 23 формируется сигнал sinT После перемножения множительным узлом 21 сигнала У4. с сигналом l/cos
и суммирования результата сумматором 1б с сигналом (-tgdD на выходе сумматора 16 формируется сигнал
У sin-i o so З Делитель 2k обеспечивает формирование сигнала
f cos4
который преобразуется преобразователем 29 в искомый угол
пряжено соответственно с возникновением опасности обрушения отвала (снижается безопасность проведения горных работ) или с увеличением объемов переэкскавации (до 20 и более). Таким образом, отклонение фактического угла наклона образующей отвала от заданного значения ведет к значительным дополнительным затратам, которые могут быть устранены при использовании предлагаемого способа. 0 -QVcMi | €054 / OV-c-torfJ- С05Ч С05Ч SIMT COSd Величина f поступает на индикатор 6 для визуального наблюдения. При наличии на экскаваторе мини-ЭВМ (в последнее время наблюдается тенденция применения бортовых мини-ЭВМ на мощных драглайнах для автоматизации и оптимизации процесса управления экскаватором) расчетная формула для искомого угла наклона образующей отвала или предотвала реализуется программно, т.е. на мини-ЭВМ кроме других функций возлагается еще функция вычислителя. Оперативное формирование информации о величине угла наклона образующей отвала крайне важно для правильного ведения горных работ, поскольку отклонение в меньшую или большую стоРОну фактического угла наклона со

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| Устройство для определения угла откоса предотвала | 1980 |
|
SU939656A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| ВСКРЫШНОЙ АГРЕГАТ | 2009 |
|
RU2396394C1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1984 |
|
SU1199868A1 |
| ЭКСКАВАЦИОННО-ТРАНСПОРТИРУЮЩИЙ КОМПЛЕКС | 2011 |
|
RU2456454C1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| АГРЕГАТ ДЛЯ БЕСТРАНСПОРТНОЙ СИСТЕМЫ РАЗРАБОТКИ | 1992 |
|
RU2034114C1 |
| Экскаватор-драглайн | 1990 |
|
SU1728394A1 |
1. СПОСОБ УЧЕТА ОСНОВНЫХ 1 ЭКСКАВАТОРАПОКАЗАТЕЛЕЙ РАБОТЫ ЭКСКАВАТОРАI Г e « Qv-cco(.5 trWC. Qt---I - ь « со5Ч/ L co5d-eiM5ii2.o -arcc TAeoL-const - угол наклона стрелы экскаватора к горизонту oL -const - расстояние между точками схода тягового и подъемного канатов с направляющих шкивов длина смотанных частей подъемного и тягового канатов; угол поворота стрелы экскаватора от ее перпендикулярного направления к продольной бровке уступа. ДРАГЛАЙНА, включающий измерение тока якорной цепи двигателя механизма подъема ковша и длин тягового и подъемного канатов, отличающийся тем, что, с целью повышения точности учета за счет оперативного формирования информации о фактических значениях углов откоса отвала или прёдотвала, дополнительно измеряют угол поворота стрелы экскаватора от ее перпендикулярного направления к продольной бровке уступа и ток якорной цепи двигателя механизма тяги ковша, а измерение длин тягового и подъемного канатов производят при значениях токов якорных цепей двигателей механизмов подъема и тяги ковша, равных заданным и пропорциональных допустимым провисаниям тяговых и подъемных канатов, при этом тяговый канат располагают параллельно образующей откоса и определяют угол откоса отвала или предотвала в зоне расположения ковша по следующей формуле положения ковша по с -())}- . ,5-i-UT-tv,)ltT+e,i -Ч 2. Способ по -П. 1 , о т л и ч а ющ и и с я тем, что значения токов якорных цепей двигателей механизма подъема ( 3 я. п.) и механизма тяги ( О я. т.) задают в зависиот типа экскаватора в гтреV/ п t - мог Jan / 0,3 - - -inoM . ° Эа° - номинальные значетоков двигате