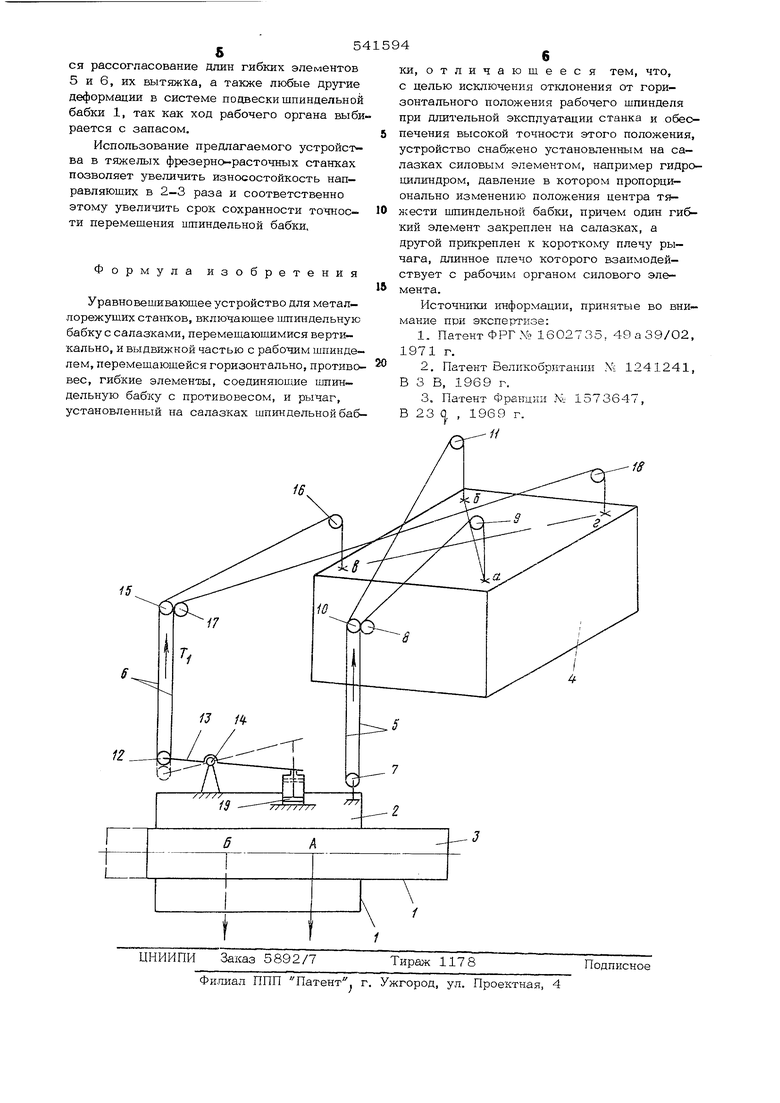
Стечением времени происходит постепен ная вытяжка гибких элементов из-за обмя- тия их сердцевины и других деформаций, Т. е. изменяются упругие свойства гибких элементов, следовательно, требуемому на- Т51жёнию гибких элементов будет соответствовать разное удлинение его и наоборот одному и тому же удлинению гибкого элемента будет соответствовать со временем разное натяжение. Величина растяжения гибкого элемента (удлинение eroj создается за счет наклона линейки. Этот наклон постоянен, следовательно, при перемещении выдвижной част бабки на одну и ту же величину, растяжение гибкого элемента будет одно и то же, но натяжение (усилие в гибком элемен те; его будет различным из-за изменения его упругих свойств. Следовательно, с течением времени рав новесие нарушается. Это нарушение усугуб ляется тем, что упругие свойства гибких элементов изменяются неодинаково. Следствием нарушения равновесия будет перекос всей шпиндельной бабки на направляющих передней стойки и перекос выдвижной части ее на горизонтальных направляющих салазок шпиндельной бабки. Это приводит к неравномерному износу направля ЮЕшх, и, в конечном итоге, к потере точ ности перемещения шпиндельной бабки. Таким образом, для избежания отклонения от горизонтального положения рабочего шпинделя в процессе длительной эксплуатации станка и обеспечения высокой точности этого положения, уравновешивающее устройство должно изменять натяжение гиб йих элементов пропорционально изменению положения центра тяжести щп1шдельной баб ки и при этом компенсировать автоматически любые случайные или систематические изменения длины гибких элементов, а также возникающие любые другие деформации в звеньях, участвующих в системе уравно- вешивания. ТЦель изобретения - исключение отклонения от горизонтального положения рабоче го шпинделя при длительной эксплуатации станка и обеспечение высокой точности этого положения. Это достигается тем, что предлагаемое устройство снабжено установленным на салазках силовым элементолм, например, гидроцилиндром, давление в котором пропор ционально изменению положения центра тя жести шпиндельной бабки, причем один гиб кий элемент закреплен на салазках, а другой прикреплен к короткому плечу рычага, длинное плечо которого взаимодействует с рабочим органом силового элемента. На чертеж-е изображена схема описываемого устройства. Устройство включает шпиндельную бабку 1 с салазками 2, перемещающимися вертикально, и выдвижную часть 3 с рабочим шпинделем, перемещающуюся горизонтально, противовес 4, гибкие элементы 5 и 6, соединяющие шпиндельную бабку 1 с противовесом 4. Гибкий элемент 5 закреплен через блок 7 непосредственно на салазках 2 шпиндельной бабки 1, а два свободных его конца перекинуты через блоки 8, 9 и 10, 11 и закреплены на противовесе 4 в точках CL и 5. Гибкий элемент 6 через блок 12 соединен с коротким плечом рычага 13, который через ось 14 закреплен на салазках 2 шпиндельной бабки 1. Свободные концы гибкого элемента 6 перекинуты через блоки 15, 16 и 17, 18 и закреплены на противовесе 4 в точках 6 и а Длинное плечо рычага 14 опирается на перемещающийся рабочий орган, например шток гидроцилиндра силового элемента 19, установленного на салазках 2. Силовый элемент может быть выполнен в виде гидро- или пневмоцилиндра, давление в котором изменяется пропорционально изменению положения центра тяжести шпиндельной бабки 1. При крайнем правом положении выдвижной части 3 шпиндельной бабки 1 гибкий элемент 5 натянут усилием Т , а гибкий элемент 6 - усилием Т. Центр тяжести шпиндельной бабки 1 находится в точке А. При перемещении вьщвижной части 3 влево положение центра тяжести изменится, например центр тяжести переместится в точку Б, следовательно, натяжение гибкого элемента 5 уменьшится на определенную величину, а натяжение гибкого элемента 6 увеличится на ту же самую величину, и, соответственно, гибкий элемент 5 сократит, а гибкий элемент 6 увеличит свою длину. Одновременно с перемещением выдвижной части 3 влево изменится давление на рабочий орган силового элемента 19. Рабочий орган переместится вверх и поднимет длинное плечо рычага 13 в такое положение, при котором давление в силовом элементе 19 и натяжение гибкого элемента 6 уравновесятся. Короткое плечо рычага 13приэтом опускается, натягивая гибкий элемент 6, и поднимает противовес 4, тем самым ослабляется натяжение гибкого элемента 5, длина которого при этом сокращается. Таким образом, за счет хода рабочего органа силового элемента 19 компенсирует-
| название | год | авторы | номер документа |
|---|---|---|---|
| Уравновешивающее устройство для металлорежущих станков | 1976 |
|
SU589088A2 |
| ФРЕЗЕРНО-РАСТОЧНОЙ СТАНОКI Ей | 1972 |
|
SU360163A1 |
| Гидравлическое устройство уравновешивания вертикально-подвижного узла | 1980 |
|
SU991673A1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| УНИВЕРСАЛЬНЫЙ КРУГЛОШЛИФОВАЛЬНЫЙ СТАНОК | 1992 |
|
RU2050248C1 |
| Устройство для уравновешивания вертикально подвижного узла | 1983 |
|
SU1073010A1 |
| Станок для горячей навивки пружин | 1990 |
|
SU1726098A2 |
| Устройство для компенсации прогиба выдвижного ползуна | 1981 |
|
SU1004076A1 |
| Фрезерно-расточной станок | 1981 |
|
SU997995A2 |
| Устройство для закрепления инструментальных оправок | 1976 |
|
SU590089A1 |
