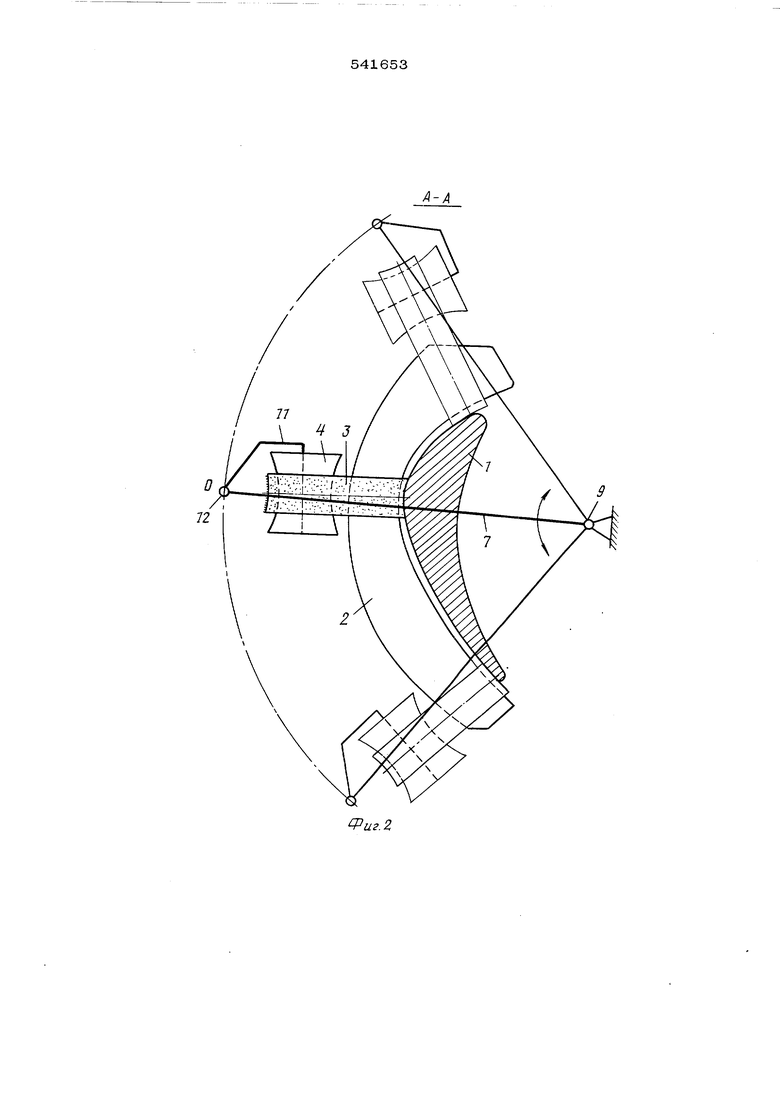
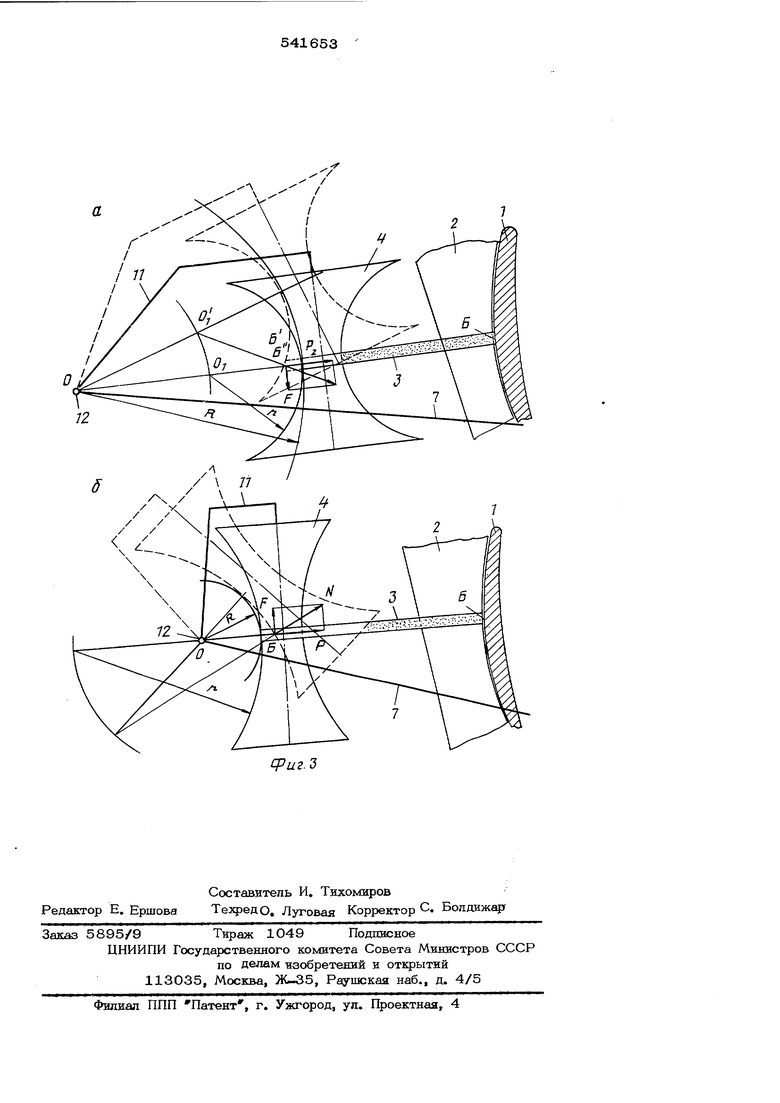
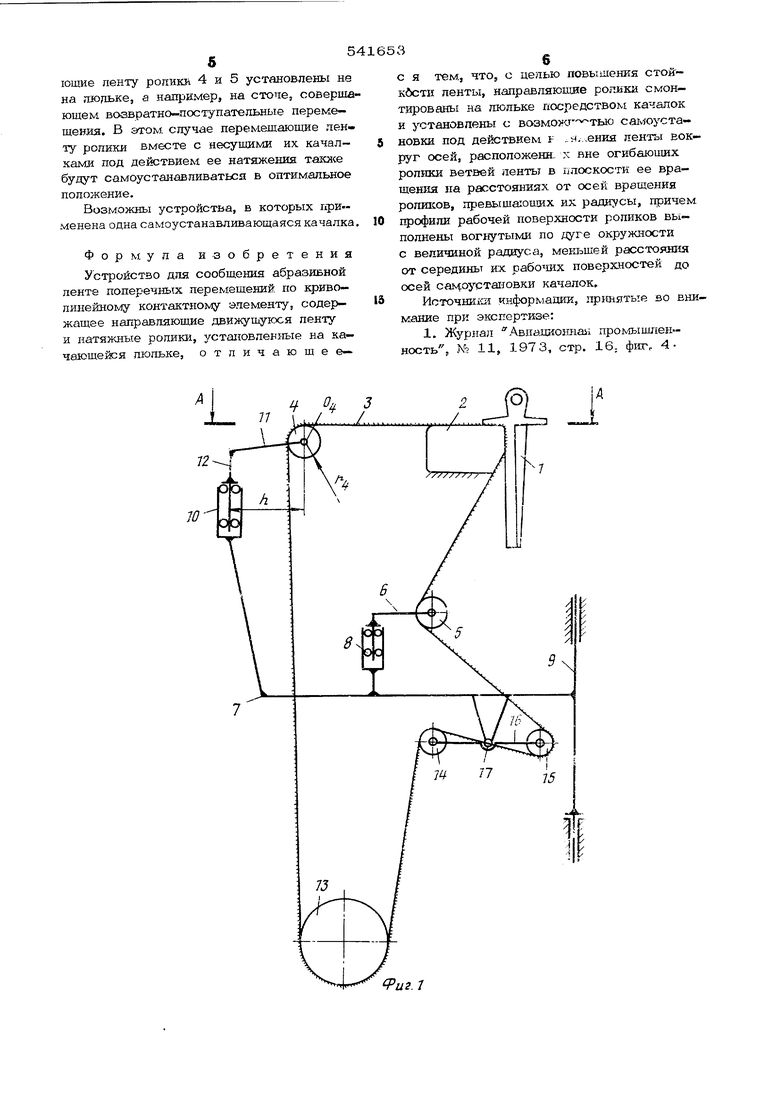
Сообщение ленте поперечных движений по копиру 2 производится пу-тем перемеще ния опорных роликов 4 и 5. СЬь вращения ролика 5 с помощью качалки 6 соединена с люлькой 7 шарниром 8. Люпька 7 имеет вазможность поворачиваться вокруг вертикальной оси 9 (механизм по ворота люльки на чертеже не изображен), Ролик 4 также шарнирно установден в опо ре 10 с помощью качалки 11 ось 12 которой имеет возможность поворач1шаться в опоре 1О, Ось 12 качалки 11 расположена вне огибающих ропик ветвей пенты в .плоское,-™ ти ее вращения на расстоянии tl от оси U вращения ролика 4, превыщаюи1ем его радиус Это же относится и к ролику 5 с качалкой Ь. Шлифовальная лента 3 приводится ьо вращение шкивом. 13. Натяжение яенты производите;/ роликами 14 и 15, уста- новленнымл на коромысле 16, имеющем возможность поворачиваться вокруг оси 17, закрепленной на люльке 7. Поворот коромысла 16с роликами в направлении натяжения ленты производится, накример пружиной или rpysoM. (на чертеже не кзображело). Профиль рабочей поверхности ролика 4 (фкг. За) выполнен вогнутым по дуге ок ружности с радиус.тм р , меньшим расстояния от середины рабочей поверхности ролика (точки Б ) дэ оси 12 его кача1 ия (самоустановки). Это обеспечивает устойчивость положения качалки 11 (при ее случайном отклонении или отклонении ленты она возвращаете,- в исходное состояни под действием, натяжения ленты). Это же относится и к ролику 5. При работе устройства вращается натя нутая роликами 14 и 15 шлифовальная лента 3. Люлька 7 соверщает возвратно- качательные движения вокруг оси 9 при этом ролики 4 и 5 перемещают ленГу вдоль контура контактного элемента 2 (фиг. 2). Под действием натяжения ленты качалки 6 и 11 поворачивактся в щар нирах 8 и 1О таким образом (фиг« 2), чтобы в каждом промежуточном положени люльки 7 длина участков ленты, расположенных между копиром 2 и ролнкамя 4 и 5, была миним.альной. При этом благодаря самоустановке качалок 11 и 6 в каж дом положении люльки 7 оси перемещающи ленту роликов 4 и 5, а следовательно, уч ки расположенной на них ленты оказываю ся параллельны участкам ленты на копире 2 и перпендикулярны к плоскости вращения енты, что исключает ее перекос повы стойкость. Пусть в какэ. промежуточком положении люльки 7 (фш, 3f() качалка 11 окажется не в оптимальном положении, когда участок ленты Б Б минимален, а в некотором. положешШа показшшом пунктиром. Ведущий ленту ролик при этом окажется в положении, гши котором центр O.J вогнутой рабочей поверх ности ролика сместится в положение 0 а конта будет находиться на рол:.ике 4 в точке Б , прячем длина участка ленты Б Б, находящегос.я между ротшком и копиром уже не булет мйним.альнойг так как Б Б больше Б Б, Под дейстБием силы, на.-тяжен1Ш ле.кты Р с ее стороны ня ропик 4 будет действовать сида давления N -.1 tr Iп-налрав пенная по норм-апи О b к .сочкё о профиля ролика, в которой находится край.няя точка участка ленты Б Б. Сила N разлагается на составгшюшие Р , на правленную вдопь ленты, и F , направленную перпендикулярно Р-, Под де.йстваем силы F ролик 4 cTpervCiTCH повернуть качалку вокруг оси 12 из неустойчиво го положения в устойч.шое. Таклм образо.м, при условии Р - R (где R ОБ - расстояние от рабочей .поверхности ролика 4 в точке Б до оси О качания ротагка) качал..;-; 11 г-ри ее случайных отклонениях стремится вместе с роликол-: 4 в Устойчивое положение, при котором ресстоякИе между точками Б и Б ,ально. Допустим, что / R (фиг. 3,6), В этом, случае при от-ююнении ха чалк.ц ИЗ оптимального положения ролнк займет Tajcoe положение, при котором лента будет находиться в точке Б ропи.. В этом случае нормальная сила W от давления ле.иты ка ро.г;,:к -акже разлагаетс;я на силу натя ;гения .-енты Р и силу F ,. стремя 1ук)С52, эдггЖО, повернуть ролик вместе с кача/гкой 11 BOKpjrr оси 12 против часорой стрелки т.е. в сторону, противопо-.v. .-Jiyю усахзртчивому положению качаякя j. L. Качалкг 11 будет поворачиваться .вокруг оси О ,тротив часовой стрелки до тех пор, пока рогеик 4 не выйдет из под ленты- Таким эб- рааом в этом случае меха.ние.у. будет не- pa6oTDcnoco6.tibiA.:u Следовательно, радиус р вогнутой рабочей поверхности перем&шаюшего ленту ролика 4 должен быть мень и.:е расстояния R от оси 12 качания ролика до наиболее удаленной точки (середины его рабочей поверхности Б (фгп-. ). К другим вариантам предложения относятся ycTpoiicTBa, в которых переметающие ленту ропикь 4 и 5 установлены не на людьке, а например, на стоне, соверша ющем, возвратно-поступательные перемещенля. В этом, случае перемешающие ленту ролики вместе с несущими их качалками под действием ее натяжения таклсе будут самоустанавливаться в оптимальное положение. Возможны устройства, в которых гфи- менена одна самоустанавливающаяся качалка Формула изобретения Устройство для сообщения абразивной ленте поперечнь х перемещений по криволинейному контактному элементу, содержащее направляющие движущуюся ленту и натяжные ролики, установленные на качающейся люльке, отличающее- 5
J
IJжгчмгЬа
игЛ 3 с я тем, что, с целью повышения стойгкйсти ленты, направляющие ролики смонтированы на люльке посредством качалок и установлены с возможт тыо caivfoycTaновки под действием ь .я/.-ения яенты вокруг осей, расположенн. х вне огибающих ролики ветвей ленты в плоскости ее вращения на расстояниях от осей вращения роликов, превышающих их радиусы, причем профили рабочей поверхности роликов выполнены вогнутыми по дуге окружности с величиной радиуса, меньшей расстояния от середины их работах поверхностей до осей саноустановки качалок, Источни1 31 информации, принятые во внимание при экспертизе: 1. Журнал ABiiaJLOiOHJiaii промышлен11, 1973, стр. 16; фиг. 4ность% №
а
г
z/гЗ

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки криволинейных поверхностей и станок для его осуществления | 1982 |
|
SU1061785A2 |
| Способ обработки лопаток | 1975 |
|
SU541652A1 |
| Ленточно-шлифовальный копировальный станок для обработки лопаток | 1960 |
|
SU141073A1 |
| Ленточно-шлифовальный станок | 1980 |
|
SU975348A2 |
| СТАНОК ДЛЯ ЛЕНТОЧНОГО ШЛИФОВАНИЯ ПЕРА ЛОПАСТИ ВОЗДУШНОГО ВИНТА | 1984 |
|
SU1254643A3 |
| Копировальный станок для одновременной обработки спинки и корыта лопатки | 1959 |
|
SU127584A1 |
| Устройство для сообщения абразивной ленте поперечных движений | 1975 |
|
SU534342A1 |
| ЛЕНТОШЛИФОВАЛЬНЫЙ ПОЛУАВТОМАТ | 1967 |
|
SU195922A1 |
| Ленточно-шлифовальный станок для обработки пера лопаток | 1977 |
|
SU745656A1 |
| Копировально-фрезерный станок | 1977 |
|
SU680819A1 |