(54) КОЛЕСНО-ДБАГАЮЩИЙ ДВИЖИТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-шагающий движитель транспортного средства | 1981 |
|
SU1000336A1 |
| Колесно-шагающий движитель | 1979 |
|
SU887340A2 |
| Колесно-шагающий движитель | 1976 |
|
SU650877A1 |
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| Колесно-шагающий движитель | 1980 |
|
SU908646A1 |
| Колесно-шагающий движитель | 1980 |
|
SU874445A1 |
| Колесно-шагающий движитель | 1977 |
|
SU679465A1 |
| Колесно-шагающий движитель | 1980 |
|
SU921936A1 |
| Устройство для обеспечения движения транспортного средства в колесно-шагающем режиме | 1977 |
|
SU659446A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
.1
Изобретение относится к транспортному машиностроению, в частности, к транспортным средствам высокой проходимости, предназначенным для эксплуатации на пересеченной местности в разнообразных грунтовых условиях.
По основному авт. ев, № 65О877, известен колесно-шагающий движитель, содержащий два шарнирно сочлененных рычага, первый из которьгх своим сво- JQ бодным концом шарнирно соединен с корпусом транспортного средства, а другой со ступицей колеса, тяговык двигатель, тяговый редуктор, блокирующий механизм, планетарный редуктор, расположен- js ный между бпокирукацим механизмом и тяговым редуктором, электромагнитные тормоза планетарного редуктора и блок управления тяговым двигателем и электромагнитнымт тормозами l
Недостаток данного движителя заключается в том, что в нем не исключается возможность поворота рычагов на угол
больщий или меньший, чем нужно для поворота, соответствующего одному шагу поэтому отсутствие вращения рычагов на этапе выноса колеса, например вследстьие отрыва колеса от грунта, снижается надежность работы движителя и транспортного средства в йелом.
Цель изобретения - повышение надежности движителя в работе.
Поставленная цель достигается тем, что.корпус тягового двигателя снабжен двумя диаметрально расположенными концевыми выключателями, а первый рычаг - кулачком дли взаимодействия с вь ключателями и датчиком наличия вращения рычага, причем концевые выключатели и датчик подключены к блоку управления тяговым двигателем и электромагнитными тормозами.
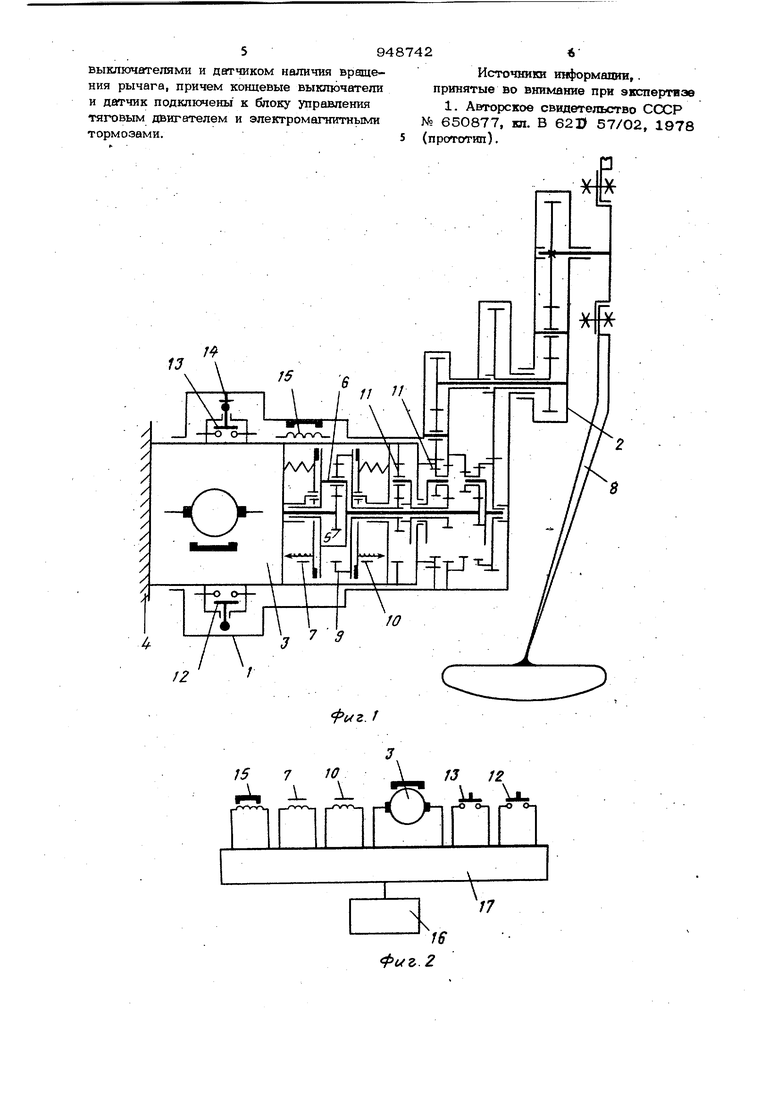
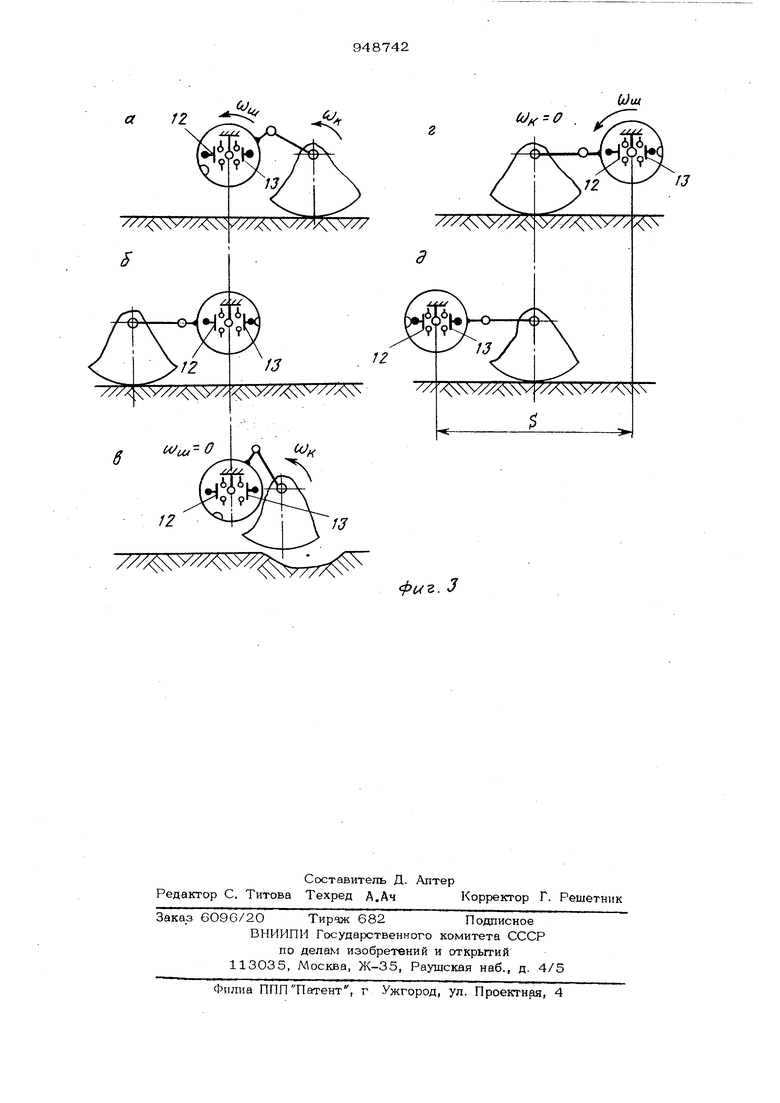
На фиг. 1 йредставлена кинематическая схема движителя; на фиг. 2 - принципиальная электрическая схема соединений; на фиг. 3 - кинематика работы движителя. 394 Колесно-шагаклций движитель состоит из двух шарнирно сочлененных рычагов 1 и 2, тягового двигателя 3, соединенного с корпусом 4 транспортного средства. На корпусе тягового двигателя 3 установлен в подшипниках рычаг 1, Вал тягового двигателя 3 соединен с солнечной шестер ней 5 блокирующего механизма. Водило 6 этого ряда соединено с элек тромагнитным управляемым тормозом 7 И посредством тягового редуктора, расположенного в полостях обоих рычагов 1 и 2, со ступицей колеса 8, установленного на свободном конце рычага 2. Эпицикл 9 блокирующего механизма соединен с электромагнитным управляемым тормозом Ю и посредством планетарного редуктора 11 - с рычагом 1. На корпусе тягового двигателя диаметрально противоположно установлены конечные вы ключатели 12 и 13, взаимодействующие с кулачком 14, установленным неподвижно на рычаге 1. Кроме того, движитель снабжен датчиком 15 наличия вращения первого рычага 1, Тяговый двигатель 3, электромагнитные тормоза 7 и 10 подключены к блоку 16 питания через блок 17 управле ния, который связан с электрическими цепями конечных выключателей 12 и 13 и датчика 15 наличия вращения. Колесно-щагающий движитель работает следующим образом. При включении тормоза Ю эпицикл 9 и рычаг 1 оказываются заторможенными. При подаче питания к тяговому двигателю 3 вся мощность через планетарный ряд блокирующего механизма водило 6 и тяговый редуктор передается на вращение колеса 8. Движитель работает в колесном режиме. В колес но-щагающем режиме осуществляется передвижение, когда сначала все колеса в определенной последовательности при неподвижном корпусе перемещаются вперед по опорной поверхности, а затем относительно неподвижных колес на грунте осуществляется перенос корпуса. Этап переноса колес осуществляется подачей элеютропитания с. помощью блока управления на тяговый двигатель 3 и тормоза 7 и 10. При этом вся мощность от тягового двигателя через блокирующий механизм передается Н9 вращение колеса и рычагов. Благодаря дифференциальной связи колесо начинает перемещаться по опорной поверхности как активное от момента на 2 колесе и толкаемое от усилия на конце второго рычага (см. фиг. Зр). При достижении колесом крайнего переднего положения (см. фиг. 3 кулачок 14 замыкает конечный выключатель, благодаря чему выдается сигнал в блок 17 управления, который отключает питание от тягового двигателя 3 и торцов. 7 и 10. Рычаги и колеса блокируются, следовательно движитель оказьтается подготовленным к реализации следующего этапа - этапа переноса корпуса. Если.при реализации переноса колеса, оно либо переместилось на небольщую Величину, ли W .воо&це не переместилось (см. фиг. 3,О), т.е. не вращакэтся рычаги, то датчик 15 подает в блок 17 управления сигнал, coorBercTByiompji концу этапа перемещения колеса (г. е. замыканию конечного выключателя 13), после чего рычаги и колесо блокируются. Отсутствие вращения рычйгов может возникнуть по причине заклинки или поломки одного из элементов кинематической цепи привода шагания, а также зависания колеса над опорной поверхностью, когда в силу кинематики механизма перемещение невозможно. Реализация этапа переноса.корпуса осуществляется подачей питания на тяговый двигатель 3 и электромагнит 10. При этом вся мощность от тягового дрнгателя передается на вращение рычагов, которые при неподвижных колесах на грунте обеспечивают перемещение корпуса транспортного средства на величину щага (см. фиг. 3,2, (9)- Этап переноса заканчивается по срабатьтанию конечного выключателя 12. Использование изобретения упрощает управление движением, так как обеспечивается автоматическая фиксация конца этапов переноса колес и корпуса, увеличивается надежность работы движителя, а также появляется возможность перехода на колесный режим при отсутствии вращения рычагов. Формула изобретения Колесно-шагающий движитель по авт. св. № 650877, отличающийся тем, что, с целью увеличения надежности его в работе, корпус тягового двигателя снабжен двумя диаметрально расположенными концевыми выключателями, а первый рычаг - кулачком для взаимодействия с
выключатепями и датчиком наличия вращения рычага, причем концевые выключатели и датчик подключены к блоку управления тяговым двигателем и электромагнитньат тормозами.
. f
J5 7 /
hnn
Источники информации,. принятые во внимание при экспертизе
/J /f
W
77 / -/ / у7х х//хк, 5
X/x/ xv/xx w/.,,
фиг. 3 (fJf 0 . 3 V//A x
