(54) КОДЕСНО-Ш.ЛГ.ЛЮШПП ДВИЖИТЕЛЬ


| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-шагающий движитель | 1975 |
|
SU541718A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ОПОРНОЙ И ГЕОМЕТРИЧЕСКОЙ ПРОХОДИМОСТИ | 2019 |
|
RU2705869C1 |
| Колесно-шагающий движитель транспортного средства | 1981 |
|
SU1000336A1 |
| Колесно-шагающий движитель | 1976 |
|
SU650877A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| Колесно-шагающий движитель | 1980 |
|
SU874445A1 |
| Колесно-шагающий движитель | 1980 |
|
SU908646A1 |
| Колесно-шагающий движитель | 1979 |
|
SU887340A2 |
| Колесно-шагающий движитель | 1980 |
|
SU921936A1 |
1
Изобретеиие относится к транспортной технике, в частности к движителя.м транспоных средств высокой проходимости, и может быть исиользовано в различных планетоходах.
Известен колесно-шагаюшпй движите.ть, содержащий систему трех рычагов, на концах которых, расположен1нлх в вер1нинах равностороннего треугольника, установлены ходовые колеса, приче.м движитель содержит приводы независимого вращения колес и системы рычагов вместе с колесами 1.
Иедостатко.м этого движителя являетея невоз.можность раскладки верхнего колеса, поэтому в режиме колесного хода про.ходимоеть движителя невелика, а на1рузки на опорные колеса повышены.
Иаиболее близким по технической eyniности и достигаемому результату к предлагаемому является колесно-н агаю1цих движитель, содержащий систему трех рычагов, два из которых еоединены с третьим носредством общего шарнира, а между собой - упругим элементом, размешенным в этом шарнире, три ходовых колеса, расположенных в вер;нинах углов равностороннего треугольника, два из KOTOjibiX установ.1ены на концах первых рычагов, приводы разеистем1з1 рычадельного врашения колес гов и механизм раскладки третьего колеса грунта, причем на опорную поверхность па оси oGniero третье колесо становлено парнира 2J.
Недостатками этого движиге.чя являются неудовлетворительная плавность колесного хода и пониженная п)офи.,1ьная проходимость, что объясняется непосредственной передачей усилий от третьего колеса через третий рычаг непосредственно корпусу транс портного средства.
Цель изобретения - повышение плавности и профильной проходимости колесного хода.
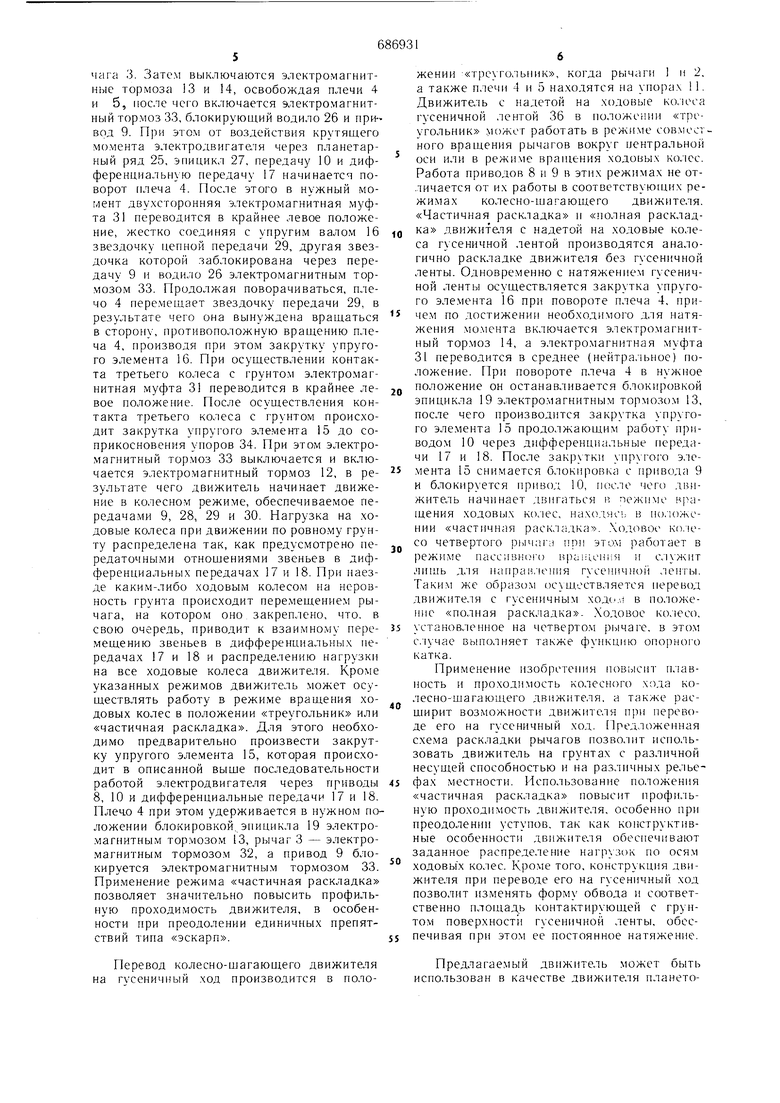
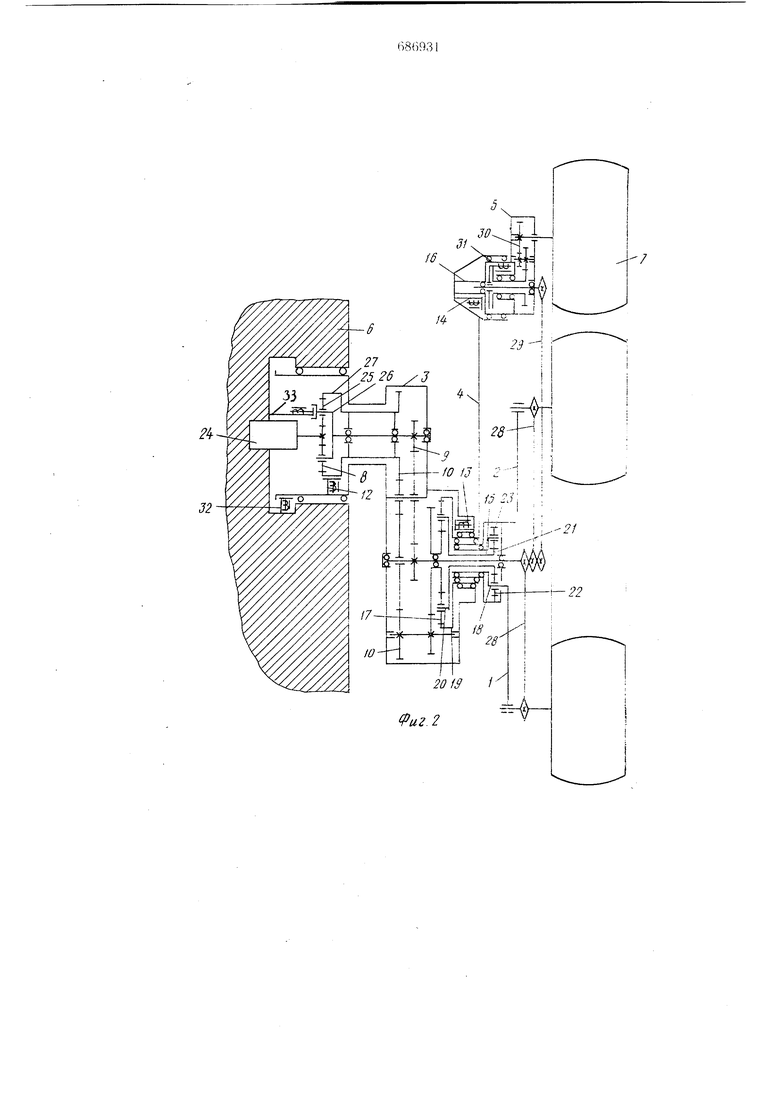
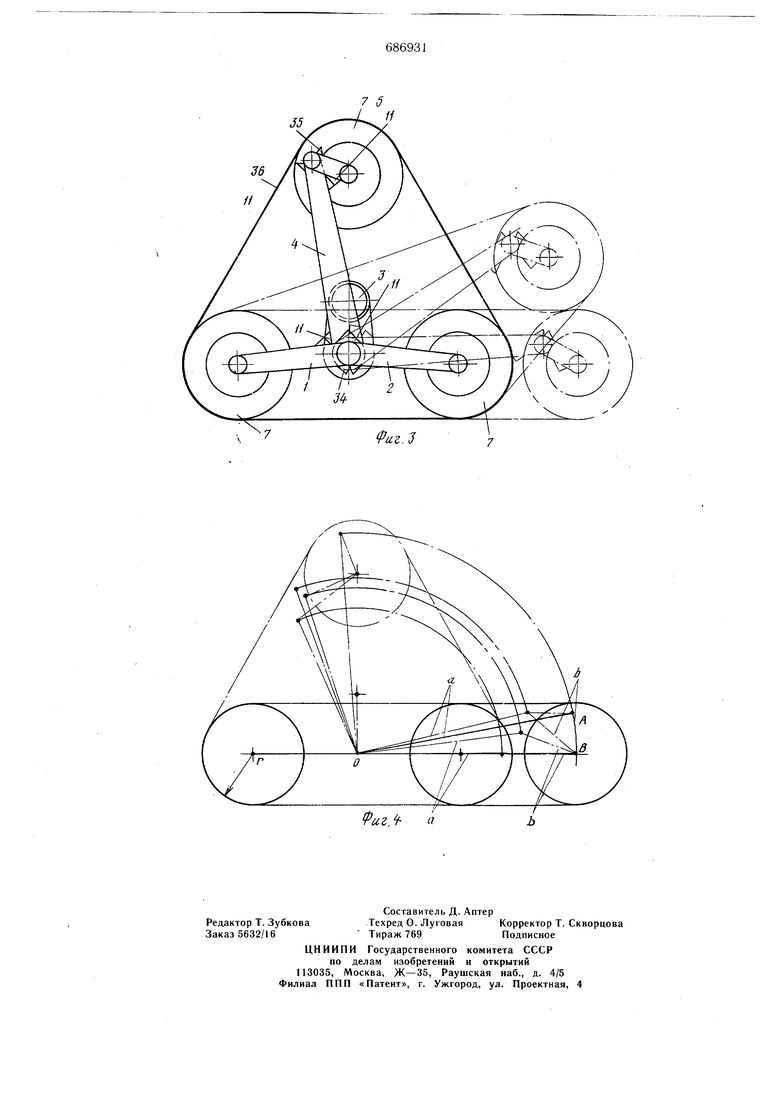
Иостав.тенная цель достигается тем, что третье ходовое колесо присоединено к обп;ему шарниру посредством четвертого рычага, состояшего из двух шарнирно соединенных плеч, снабженных механизмом их взаимного поворота, четвертый рычаг соединен с упругим элементом через дифференциальную передачу, а плечи четвертого рычага соединены между собой дополнительным упругим элементом, расположенным в их общем шарнире. Кроме того, сумма плеч четвертого рычага связана с радиусом ходового колеса следующим неравенством: 5,3г /Q + ,4г, где/а 4 ff/ - сумма длин плеч четвертого рычага;г - радиус ходового колеса. На фиг. 1 изображен движитель в режимах шагающего и колесного ходов, вид спереди; на фиг. 2 - то же, в положении полной раскладки, вид сверху; па фиг. 3 - движитель, оборудованный гусеничной лентой; на фиг. 4 - схема раскладки движителя с шагающего на колесный (гусеничный) ход. Колесно-пдагающий движитель содержит первый 1, второй 2, третий 3 и четвертый рычаги. Последний рычаг состоит из шарнирно соединенных плеч 4 и 5. Все рычаги соединены между собой общим шарниром, причем свободный конец рычага 3 установлен поворотно в корпусе 6 транспортпого средства. На свободных концах рычагов 1 и 2, а также плече 5 установлены ходовые колеса 7. Движитель может работать в двух режимах: режиме вращения вокруг центральной оси, обеспечиваемом приводом 8, и в режиме вращения ходовых колес, осуществляемом приводом 9. Передача 10 обеспечивает поворот рычагов 1 и 2 и плеча 4 относительно рычага 3 и перевод их из положения «треугольник в положение «полная раскладка. Фиксация рычагов в положении «треуго.мьник осуществляется с помощью упоров И и электромагнитных тормозов 12, 13 и 14. Для улучшения взаимодействия ходовых колес с грунтом, смягчения ударных нагрузок и улучшения распределения нагрузок па ходовые колеса при работе движителя в колесном режиме в положении раскладки рычагов служат упругие элементы 15 и 16. Шарниры рычагов 1, 2 и четвертого рычага соединены с трубчаты.м упругим элементом 5 при помощи дифференциальных передач 17 и 18. Причем эпицикл 19 первой передачи соединен с шарниром четвертого рычага, а ее водило 20 - с упругим валом. Другой конец упругого вала соединен с центральной шестерней 21 второй дифференциальной передачи, водило 22 которой скреплено с шарннром рычага 1, а эпицикл 23 - с шарниром рычага 2. Вращение ходовых колес рычагов 1 и 2 и поворот плеча 5 относительно плеча 4 осуществляются от электродвигателя 24 через планетарный ряд 25, водило 26 которого связапо с приводом 9, а эпицикл 27 - с приводом 8, и цепные передачи 28 и 29. Вращение ходового колеса четвертого рычага происходит от цепной передачи 29 и зубчатой передачи 30, размещенной внутри рычага. Поворот плеча 5 относительно плеча 4 происходит одновременно с поворотом плеча 4 от цепной передачи 29 при блокированнс)м приводе 9. Подключение передачи 30 ироизводитея при помощи двухсторонней электромагнитной муфты 31. Фиксация рычага 3 относительно Kopnyta 6 осуществляется при помощи электро.магнитного тормоза 32. Электромагнитный тормоз 33 удерживает водило 26 планетарного ряда 25 при работе движителя в режиме совместного вращения рычагов относительно центральной оси. Упоры 34 и 35 ограничивают углы закрутки упругих эле.ментов 15 и 16. Конструкция колесно-шагающего движителя при определенном соотношении длин рычагов и радиуса ходовых колес позволяет осуществить перевод его на гусеничный ход и обеспечивает работу в любом из имеющихся режимов движения. Кроме того, фиксация плеча 4 относительно рычага 3 электромагнитным тормозом 13 допускает работу движителя в режиме вращения ходовых колес при любой заданной конфигурации гусеничного обвода. Натяжение гусеничной ленты 36 осуществ;1яется поворотом плеча 5 при блокированном приводе 9 через передачу 29. Для неизменности длины гусеничной ленты при переводе движителя из положения «треугольник в положение «полная раскладка (включая все промежуточные положения) сумма длин плеч 4 и 5 должна удовлетворять следующему условию. 5,3г ia + в 4,4г. Работа движителя в режиме вращения рычагов вокру|- центральной оси осуществляется следующим образом. Взаимное положение рычагов 1 и 2, а также плеч 4 и 5 и фиксируется упорами 11. Упругие эле.менты 15 и 16 раскручены до .минимального .мо.мента, обеспечивающего поджатие рычагов к упорам 11. Привод 10 заблокирован включенным электромагнитным тор.мозом 12. Электромагнитные тормоза 13 и 14 включены и фиксируют положение плеч 4 и 5 относительно рычага 3 и илеча 4. Электромагнитные тормоза 32 и 33 выключены. Крутящий момент выходного вала электродвигателя передается через привод 8 на эпицикл 27 и через электромагнитный тормоз 12 - на рычаг 3, приводя его во вращение. Ходовые колеса 7 приводятся во вращение через водило 26, привод 9 и цепные передачи 28 и 29. При этом двухсторонняя электромагнитная муфта 31 занимает крайнее правое положение, обеспечивающее передачу крутящего момента от цепной передачи 29 передаче 30 и от нее ходовому колесу 7 четвертого рычага. Перевод рычагов в положение «полная раскладка возможен при контакте с грунтом ходовых колес, установленных на рычагах 1 и 2. В первый момент проиеходит включение электромагнитного тормоза 32, чем блокируется вращение рычага 3. Затем выключаются электромагнитные тормоза 13 и 14, освобождая плечи 4 и 5, после чегт) включается электромагнитный тормоз 33, блокирующий водило 26 н привод 9. При этом от воздействия крутящего момента электродвигаташ через планетарный ряд 25, эпицикл 27, передачу 10 и дифференциальную передачу 17 начинается поворот плеча 4. После этого в нужный момент двухсторонняя электромагнитная муфта 31 переводится в крайнее левое положение, жестко соединяя с упругим валом 16 звездочку цепной передачи 29, другая звездочка которой заблокирована через передачу 9 и водило 26 электромагнитным тормозом 33. Продолжая поворачиваться, плечо 4 перемещает звездочку передачи 29, в результате чего она вынуждена вращаться в сторону, противоположную врап 1ению плеча 4, производя при этом закрутку упругого элемента 16. При осуществлении контакта третьего колеса с грунтом электромагнитная муфта 31 переводится в крайнее левое положение. После осуществления контакта третьего колеса с грунтом происходит закрутка упругого элемента 15 до соприкосновения упоров 34. При этом электромагнитный тормоз 33 выключается и включается электромагнитный тормоз 12, в результате чего движитель начинает движение в колесном режиме, обеспечиваемое передачами 9, 28, 29 и 30. Нагрузка на ходовые колеса при движении по ровно.му грунту распределена так, как предусмотрено передаточными отнощениями звеньев в дифференциальных передачах 17 и 18. При наезде каким-либо ходовым колесом на неровность грунта происходит перемещение.м рычага, на котором оно закреплено, что. в свою очередь, приводит к взаимному перемещению звеньев в дифференциальных передачах 17 и 18 и распределению нагрузки на все ходовые колеса движителя. Кроме указанных режимов движитель может осуществлять работу в режиме вращения ходовых колес в положении «треугольник или «частичная раскладка. Для этого необходимо предварительно произвести закрутку упругого элемента 15, которая происходит в описанной выше последовательности работой электродвигателя через приводы 8, 10 и дифференциальные передачи 17 и 18. Плечо 4 при этом удерживается в нужном положении блокировкой, эпицикла 19 электро.магнитным тор.мозом 13, рычаг 3 - электромагнитным тормозом 32, а привод 9 блокируется электромагнитны.м тормозом 33. При.менение режима «частичная раскладка позволяет значите тьно повысить профильную проходи.мость движителя, в особенности при преодолении единичных препятствий типа «эскарп. Перевод колесно-щагающего движителя на гусеничный ход производится в положении «треугольник, когда рычаги 1 и 2, а также плечи 4 и 5 находятся на упорах 11. Движитель с надетой на ходовые ко.юса гусеничной лентой 36 в положении «треугольник может работать в режиме сов.местного рычагов вокруг центральной оси или в режиме вращения ходовых колес. Работа приводов 8 и 9 в этих режимах не от.тичается от их работы в соответствую цих режимах колесно-щагающего движителя. «Частичная раскладка и «полная раскладка движитетя е надетой на ходовые колеса гусеничной лентой производятся аналогично раскладке движителя без гусеничной ленты. Одновременно с натяжением гусеничной ленты осуществляется закрутка упругого элемента 16 при повороте плеча 4, приче.м по достижении необходимого для натяжения .мо.мента включается электромагнитный тормоз 14, а электромагнитная муфта 31 переводится в среднее (нейтральное) положение. При повороте плеча 4 в нужное положение он останавливается блокировкой эпицикла 19 электромагнитным тормозом 13, после чего производится закрутка упругого эле.мента 15 продолжающим работу приводом 10 через дифференциальные передачи 17 и 18. После закрутки пругого элемента 15 снимается блокировка с привода 9 и блокируется нривод 10, после чегс) движитель начинает двигаться н пежпмо н| ащения ходовых колес, находясь в по.южении «частичная раскладка. Ходовое колесо четвертого рычага при это.1 работает в режиме naccuBHOio нра цон1-;я и с.Ижит лишь д.1я напран,1ен1 я гусе1 ичной ленты. Таким же образом ос}щ.оствляется перевод движителя с гусеничным ходс)л1 в положение «полная раскладка - Ходовое Ko.ieco. установленное на четвертом р1 1чаге. в этом с.чучае выполняет также функцию опорного катка. Применение изобретения повысит плавность и про.чодимость колесного хода колесно-щагающего движителя, а также расширит возможности движителя при переводе его на гусеничный ход. 1редложенная схема раскладки рычагов позволит использовать движитель на грунтах с различной несущей способностью и на различных рельефах местности. Использование положения «частичная раскладка повысит профильную проходнмость движителя, особенно при преодолении уступов, так как конструктивные особенности движителя обеспечивают заданное распределение нагрузок по осям ходовых колес. Кроме того, конструкция движителя при переводе его на гусеничный ход позволит изменять форму обвода и соответственно площад ь контактируюцд.ей с грунтом noBepxHocTJi гусеничной ленты, обеспечивая при этом ее постоянное натяжение. Предлагаемый движитель может быть использован в качестве движителя планетоходов, так как легко конвертируется и после доставки может бЕ)1ть преобразован л.1я работы в любом из евоих режимов в зависимости от условий рельефа и г|)уита.
Формула изобретения
енабженных механизмс м их взаимного поворота.
.3. Движитель по н. I, отличающийся
тем. что илечи четвертого рычага соединены между собой дополИнтель и гм упругим элементом, раеположенным в lix общем шарнире.
0 4. Движнгель по и. 2, отличающийся тем. что сумма длин плеч четвертого рычага связана е радиусом ходового колеса еледующим неравенством:
5, + ,4г
где/а + ff/ --сумма длин плеч четвертого рычага:
г - радиус ходового колеса. Источники информации, принятые во внимание приэкспертизе
35
36
и
Фиг. f а
