(5) КОЛЕСНО-ШЛГАЩИЙ ДВИЖИТЕЛЬ


| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-шагающий движитель транспортного средства | 1981 |
|
SU1000336A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Колесно-шагающий движитель | 1980 |
|
SU874445A1 |
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| Колесно-шагающий движитель | 1977 |
|
SU679465A1 |
| Колесно-шагающий движитель | 1976 |
|
SU650877A1 |
| Колесно-шагающий движитель | 1980 |
|
SU948742A2 |
| Колесно-шагающий движитель | 1980 |
|
SU908646A1 |
| Колесно-шагающий движитель | 1979 |
|
SU887340A2 |
| Устройство для обеспечения движения транспортного средства в колесно-шагающем режиме | 1977 |
|
SU659446A1 |
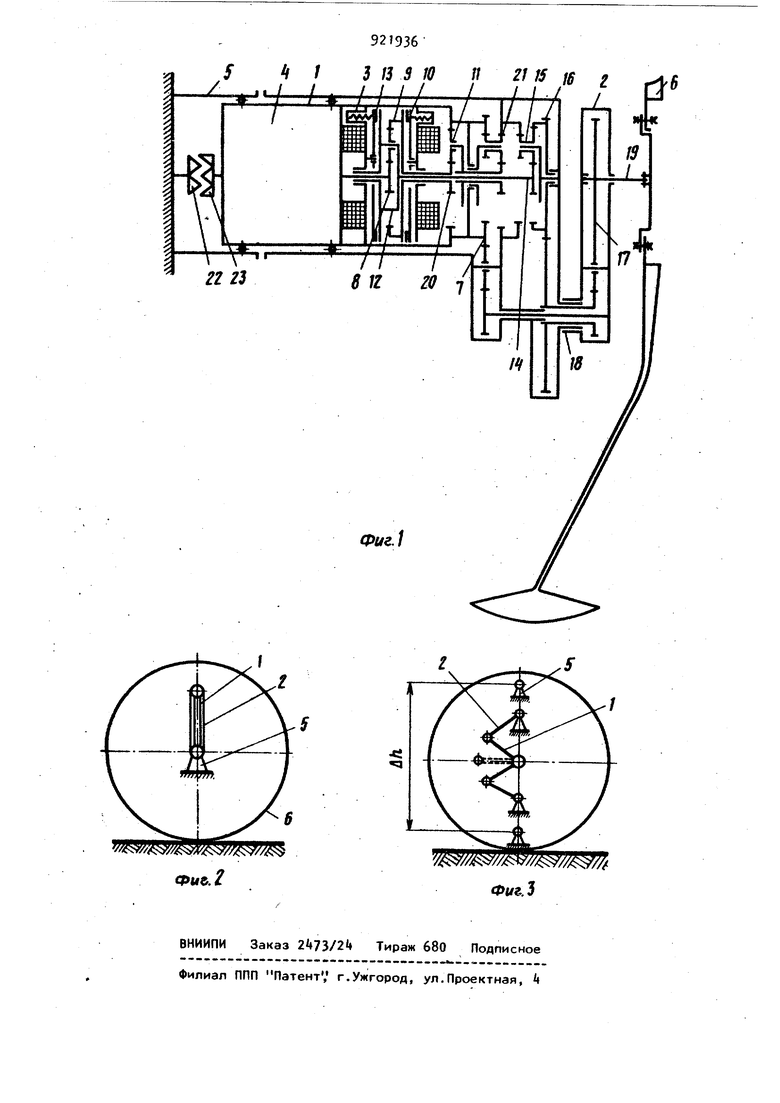
. t Изобретение относится к двйжитепям высокой проходимости, в частности к колесно-шагающим, осуществляющим как колесный режим, так и шагаю щий с заблокированным колесом. Известен колесно-шагающий движи- . тель, содержащий два шарнирно сочлененных рычага, первый из которых сво им свободным концом шарнирно соединен с корпусом транспортного средств а другой - со ступицей колеса, приводной вал и тяговый редуктор, разме щенный в обоих рычагах 1. Недостатком этого движителя являе ся наличие дифференциальной связи колеса и рычагов на этапе выноса корпуса. Наиболее близким к изобретению по технической сущности и достигаемо му результату является колесно-шагаю щий движитель, содержащий два шарнирно-сочлененных рычага, первый из которых своим свободным концом шарнирно соединен с корпусом транспортного средства, а другой - со ступицей колеЬа, двигатель, корпус которого шарнирно установлен в свободном конце первого рычага и жестко соединен с блокирующим механизмом планетарного редуктора, и тяговый редук тор, размещенный в обоих рычагах, причем корпус двигателя жестко соединен с корпусом транспортного средства 2. Недостатком известного движителя является невозможность регулирования дорожного просвета, что снижает его проходимость в колесном режиме. Цель изобретения - увеличения проходимости путем регулирования дорожного просвета. . Поставленная цель достигается тем, что в колесно-шагающем движителе, содержащем два шарнирно-сочлененных рычага, первый из которых своим свободным концом шарнирно соединен с корпусом транспортного средства, а другой - со ступицей колеса, двига3тель, корпус которого шарнирно уста новле.. в свободном конце первого рычага и жестко соединен с блокирую щим механизмом планетарного редуктора, и тяговый редуктор, размещенный в обоих рычагах, корпус двигате ля, установлен в корпусе транспортного средства с возможностью поворо та и связан с ним посредством сцепной муфты, На фиг.1 изображена кинематическая схема движителя, на фиг.2 и 3 г1ринципиальная схема работы движителя. Движитель состоит из двух пустотелых рычагов Т и 2. Первый рычаг 1 свободным концом установлен на стакане 3, конструктивно об ьединенном с корпусом двигателя t, который установлен подвижно в стакане 5. конструктивно объединенном с корпусом транспортного средства. Второй рычаг 2 связан со ступицей колеса 6. Рычаги движителя расположены в плоскости вращения колеса и кинем тически связаны друг с другом с помощью редуктора 7 взаимного вращения рычагов. Выходной вал двигателЖ t соедине с солнечной шестерней 8 блокирующег Механизма. Эпицикл 9 блокирующего механизма снабжен электромагнитным тормозом 10 и соединен че.рез планетарный редуктор 11 с первым рычагом 1, а водило 12 снабжено тормозом 13 и соединено с входным валом тягового редуктора. Тяговый редукто состоит из планетарной передачи 15 и цилиндрической пары 16, встроенны в первый рычаг, и ступицы 17, встро енный во второй рычаг. Вал 1 тягового редуктора расположен соосно с осью сочленения рычага 1 и двигателем , промежуточный вал 18 - соосно с осью сочленения рычагов 1 и 2, выходной вал 19 - соосно со ступицей 6. Редуктор 11 привода питания расположен между блокирующим механизмом (звенья 8,10,12 и 13) и передачей 15 тягового редук,тора вращения колеса, причем его солнечная шестерня 20 охватывает вал тягового редуктора, а эпици 21выполнен заодно с рычагом 1. Ко пус двигателя может соединяться с корпусом транспортного средства выключаемой муфтой, одна полумуфта 22которой соединена неподвижно с корпусом транспортного средства, а 4 вторая полумуфта 23 - с корпусом двигателя . Лвижитель работает следующим образом. Если блокирующая муфта (звенья 22 и 23) замкнута в таком положении, что рычаги 1 и 2 сложены, а их оси расположены вертикально относительно корпуса транспортного средства (фиг.2), при включении тормоза 10 и отключении тормоза 13 осуществляется колесный режим, когда от тягового двигателя 4 вращается только колесо. При включении-тормоза 13 и отключении тормоза 10 осуществляется этап переноса корпуса, при отключении тормозов 10 и 13 осуществляется этап переноса колеса, когда от тягового двигателя вращаются и колесо 6 и рычаги 1 и 2, при включенных тормозах 10 и 13 и отключенном двигателе А реализуется тормозной режим. Подготовку к работе движителя в колесном режиме с возможностью изменения дорожного просвета производят при следующей последовательности операций для каждого колеса движителя. Включением этапа переноса колеса (отключены тормоза 10 и 13) и включением тягового двигателя осуществляется перемещение колеса до момента, когда ось колеса совпадает с осью двигателя , а оси рычагов 1 и 2 совпадают (фиг.2), т.е. занимают вертикальное положение. По достижении этого положения производится разблокировка отключаемой муфты (звенья 22 и 23) и включение колесного режима в механиз -1е привода движителя, т.е. тормоз 10 включен, тормоз 13 отключен, двигатель включен. При этом, в виду того, что для вращения на месте колеса 6, установленного на грунте, требуется значительное усилие, осуществляется поворот стакана 3 и корпуса, k тягового двигателя в стакане 5 (Совместно с рычагами 1 и 2 как единое целое, так как они сблокированы тормозом 10, редуктором 11 привода питания и редуктором 7. Поворот рычагов 1 и 2, независимо от направления вращения, производится до того момента, когда их оси займут горизонтальное положение (фиг.З), после чего выключаемая муфта (звенья 22 и 23) блокируется, двигатель выключается и включается тормоз 13. Эти операции производятся для всех крлес транспортного средства, по крайней мере по одному.
После выставки всех колес в это положение движитель подготовлен к изменению дорожного Просвета, так как механизмы шагания изменили горизонтальную траекторию колеса на вертикальную.
Изменение дорожного-просвета производится включением в каждом механи ме привода движителя этапа переноса корпуса, т.е. тормоз 13 включен, тормоз 10 отключен, двигатель k вклют чен. В зависимости от направления вращения выходного вала двигателя k производится соответствующее перемещение корпуса (фиг.З) либо для увеличения, дорожного просвета, либо уменьшения, причем клиренс может изменяться в диапазоне двойной суммы длин обоих рычагов. После выставки соответствующего дорожного просвета производится отключение двигателя k и включения тормоза 10. В дальнейшем передвижение может осуществляться только в колесном режиме, включением двигателя k и отключением тормоза 13 независимо от величины дорожного просвета.
Применение изобретения позволяет путем регулирования дорожного просвета увеличить устойчивость, профильную проводимость, уменьшить
сползание на косогорах и открывает возможность непосредственных исследований свойств поверхности при минимальном дорожном просвете.
Формула изобретения
Колесно-шагающий движитель, содержащий два шарнирно- сочлененных рычага, первый из которых своим свободным концом шарнирио соединен с корпусом транспортного средства а другой - со ступицей колеса, двигатель, корпус которого шарнирно установлен в свободном конце первого рычага и жестко соединен блокирующий механизмам планетарного редуктора, и тяговый редуктор, размещенный в обоих, рычагах, отличающийся тем, что, с целью повый1ения проходимости путем регулирования дорожного просвета корпус двигателя с возможностью поворота установлен в корпусе транспортного средства и связан с ним поседством сцепной муфты.
Источники информации, ринятые во внимание при экспертизе
552232, кл, В 62 D 57/02, 10.03.75.
650877, кл. В 62 D 57/02, 19.03.76 прототип).
