1
Изобретение относится к механическому оборудованию гидротехнических сооружений, а именно х навесному оборудованию кранов, обслуживающих затворы и решетки гидросооружений.
Известен клешевой захват захватных балок, содержащий корпус с симметрично установпентл,1ми в нем на осях клешнями и запорным клином, расположенным в направляющих ij.
Недостатком известного клещевого захвата является то, что он не обеспечивает автоматического зацепления и расцепления с затворами или решетками под водой.
Целью изобретения является автоматичес кое зацепление и расцепления захвата с затворами или решетками под водой.
Эта цель достигается тем, что захват снабжен управляющим рычагом, шарнирно связанным с запорным клином, причем на одном конце управляющего рычага жестко закреплен противовес, подвешенный на гибком элементе к захватной балке, а между противовесом и запорным клином установлен выдвижной упор.
Для обеспечения ручного расцепления захватной балчш с затвором при установке последнего в затворохранипише, на втором конце управляющего рычага закреплен гибкий элемент, свободно подвешенный к балке.
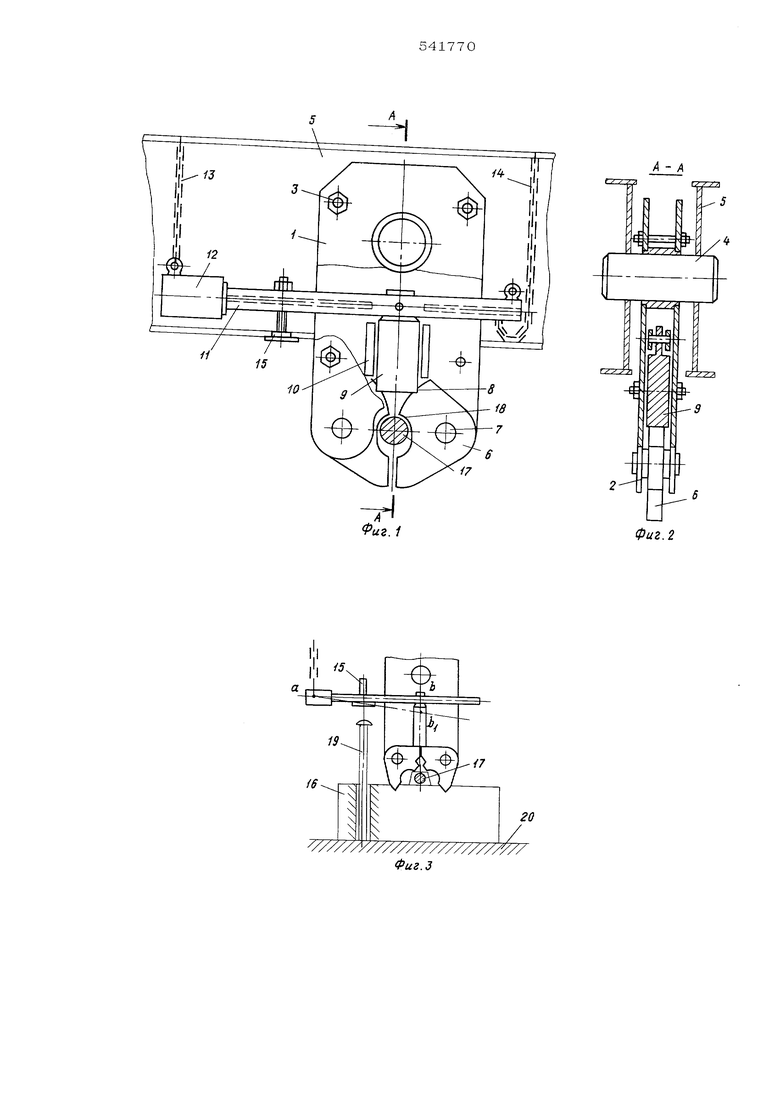
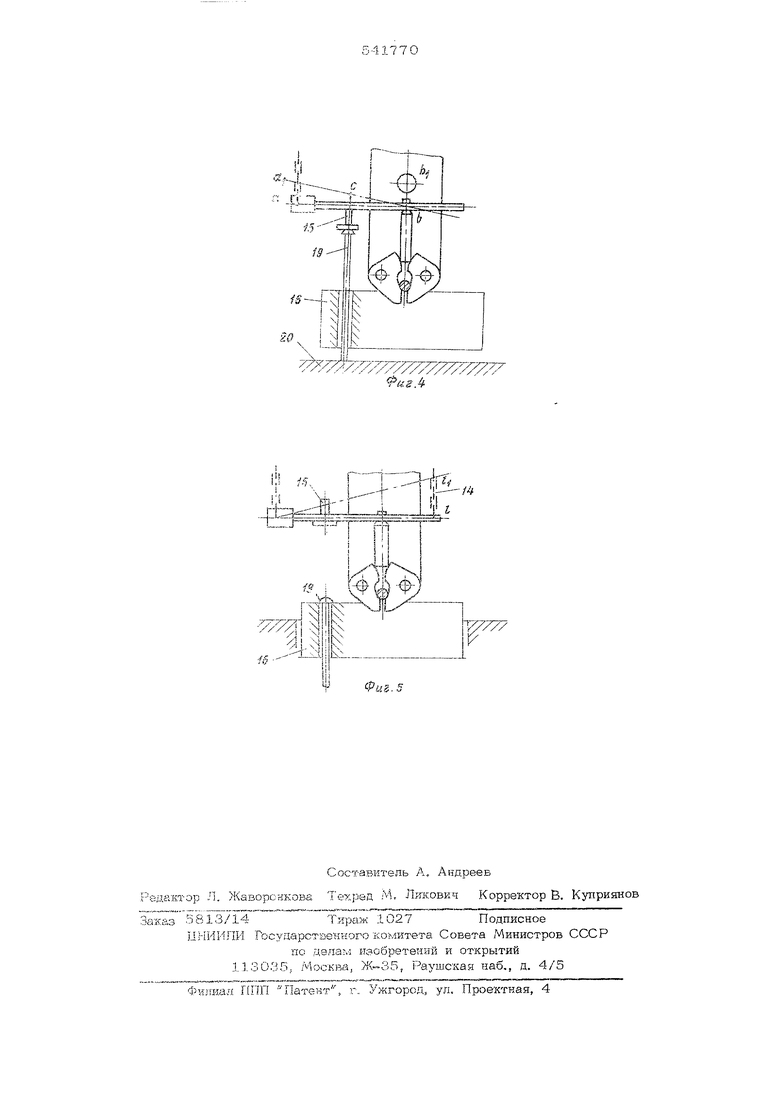
На фиг. 1 показан предлагаемый клешевой захват в закрытом положении; на фиг. 2- разрез А-А на фиг. 1; на фиг. 3 - схема работы захвата при зацеплении балки с затвором; на фиг. 4 схема работы захвата при расцеплении балки с затвором; на фиг. 5- схема работы захвата при ручном расцеплении балки с затвором.
Клещевой захват содержит разъемный корпус 1, состоящий из двух щек 2, соединенных между собой болтами 3. Корпус 1 с помощью оси 4 закреплен в металлоконструк.тши 5 захватной балки. Снизу в корпусе 1 симметрично установлены две клешни 6, вращающиеся на осях 7. Обе клешни 6 в хвостовой части имеют вырезы 8, которые в закрытом положении захвата образуют впадину, куда входит запорный клин 9, фиксирующий закрытое положение клешней. Запорный клин 9, перемещающийся в направЛЯЮ1Щ1Х 10, шарнирно соединен с улравляющим рычагом 11, на одном конце которо го закреплен противовес 12, подвешенный с помошью гибкого элемента (например iieniO 13 к металлоконструкции 5 захват- ;;ой балки. На втором конце управляюшего рычага 11 также закреплен гибкий эле- NieHT (цепь j 14, свободно подвешенный к металлоконструкции балки. Между противовесом 12 и запорным клином 9 на управляющем рычаге 11 уста новлен выдвижной упор 15. Клещевой захват работает следующим образом. При подготовке клещевого захвата к on рации зацепления выдвижной упор 15 пред варительно вдвигают-. Исходное положени захвата: зев клешней раскрыт, запорный клин 9 опирается на верхние плоскости кл ней, управляющий рычаг 11 занимает поло АениеаЬ (фиг. 3). При опускании захватной балки на затвор 16 ось 17 затвора входит в зев клеш ней 6 и нажимает на тыльную часть 18 лева. Клешни поворачиваются, при этом передние охватывающие части зева сходят- 1:я, а хвостовые части расходятся. Впадин образованная вырезами 8, раскрывается и 1, нее под собственным весом входит запор ами клин 9, при этом управляющий рычаг i I. поворачивается вокруг точки о , прит-.и г..я положение С1 Ь . Так как упор 15 , то при повороте рычага 11 он не г/:.-1Имодействует со штангой 19 затвора. В при подъеме захватной бал- J м -)сь затвора нажимает на охват1згоаюш,ие ч.1сти зева, Б результа- е чего боковые ,-рхности вырезов 8 сжимают запорный : /.iH 9, который таким образом фиксирует , iieijTJH в закрытом положении. При подготовке клещевого к 1лер1-а1ши расцепления упор 15 предварител -,но выдвигают. Исходное положение зах м.ате: клешни 6 закрыты и зафиксированы .апсрным клином 9, управляющий рычаг 11 занимает положение аЬ (фиг. 4). При опускании затвора 16 штанга 19 затвора находится в нижнем положении. При подходе затвора 16 к порогу 20 щтан га, ;/пираясь в порог, выдвигается вверх и нажимает на выдвижной упор 15. Управ- ггяющий рычаг 11 поворачивается вокруг г-очки Ь и поднимает противовес 12, принимая положение Oi Ь . При этом клин 9, будучи еще зажат клещнями 6, остается IJU месте. При посадке затвора 16 на порог 20 захватная балка продолжает опускаться, по;са ось 17 затвора не упрется в тыпьную часть 18 зева. При этом впадина, образованная вырезами 8, приоткроется, освобождая клин 9. Под действием веса противовеса 12 тфавляющий рычаг 1 поворачивается вокругточки С , принимая положение а bj и выдергивает запорный клин 9. В дальнейшем при подъеме захватной балки ось затвора, оставаясь на месте, нажимает на охватывающие части зева, клешни 6 поворачнвакпся, и зев раскрывается, осуществляя расцепление банки с затвором. Управляющий рычаг 11 при отходе выдвижного упора 15 от щтанги затвора поворачивается 3,0к.рут точки а , КЛИН 9 опускается и устанавливается на верхние плоскости клешней 6 (исходное положение при зацеплении). При ручном расцеплении захват работает следующим образом. Так как затвор устанавливается в затворохранилище на подхватах, то штанга затвора под действием собственного веса на- 7 одится в нижнем положении и не может ос}ацесгвить автоматического расцепления. В этом случае оператор вручную выдергивает клин 9. потянув за гибкий элемент 14. При этом рычаг 11 поворачивается вокруг ТОЧКИ О (фнг, 5). принимая положение ссЬ. Ф о р м у л а изобретения 1„ Клешевой захват захватной балки, содержащий корпус с симметрично установленнь1Л1и в Hevi на осях клешнями и запорHbCvf клином, расположенным в направляющих, о т л и чающийся тем, что, с цепью обеспечения автоматического зацепления и расцепления с затворами или решетками ПОД водой, захват снабжен управ- ляющим рычагом, шарнирно связанным с запорным КЛИНОМ, причем на одном конце управ.чяю-шего рычага жестко закреплен противовес, подвешенный на гибком элемент-е к захватной балке, а между противовеом и запорным клином установлен выдвижной упор, 2. Захват по п. 1, о т п и ч а ю щ и и- я тем, что. с целью обеспечения ручноо расцепления зехватной балки с затвором ри установке последнего в затворохранилие, на втором ко1;це управляющего рычага закреплен гибкий элемент, свэднэ подвешенный к балке, Источни :и информации, принятые во нимание U)JK экспертизе: 1. Авт. СБ. СССР № 114541, кл. В 66 С 1/10, 1958.
/1 -А
t23za
яИя
фиг.2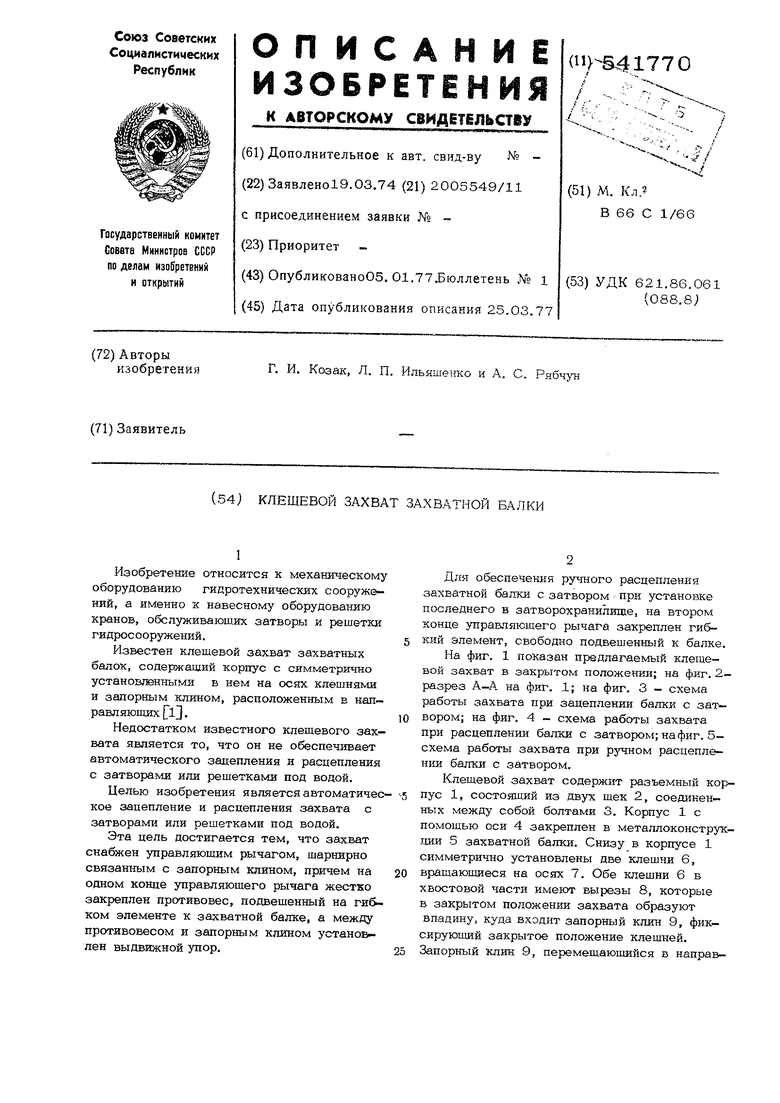

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная балка для маневрирования гидротехническими затворами с выдвижными штангами | 1978 |
|
SU732440A1 |
| Захватное устройство для гидротехнических затворов | 1984 |
|
SU1234340A1 |
| Захватная балка для подъемных механизмов, преимущественно для опускания и подъема гидротехнических затворов | 1956 |
|
SU114541A1 |
| Захватная балка для подъема и опускания шандоров в гидротехнических сооружениях | 1936 |
|
SU57028A1 |
| Автооператор | 1988 |
|
SU1616800A1 |
| Захватное устройство для раскрывающейся тары | 1988 |
|
SU1654226A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2009978C1 |
| СПОСОБ КРЕПЛЕНИЯ КОНТЕЙНЕРОВ НА РАМЕ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2223188C2 |
| Автоматическое сцепное устройство для толкаемых составов речных или озерных судов | 1976 |
|
SU636128A1 |
| Грузозахватное устройство | 1989 |
|
SU1776623A1 |
. I т
т|г
/,
,I шТ
,+-- LJ-rt
ixtt/
Фиг. 5
