2. Устройство но п. 1, отличающееся тем, что оно снабжено установленным на траверсе с возможностью вертикального пер(-меи1,ения со стороны : ,ахватных элементов
Изобретение относится к механическому оборудованию гид)отехнических сооружений а именно к навесному оборудованию кранов, обслуживаюнхих затворы и рен1етки ги;1росооружений.
Цель изобретения - новьиление безопасности работы.
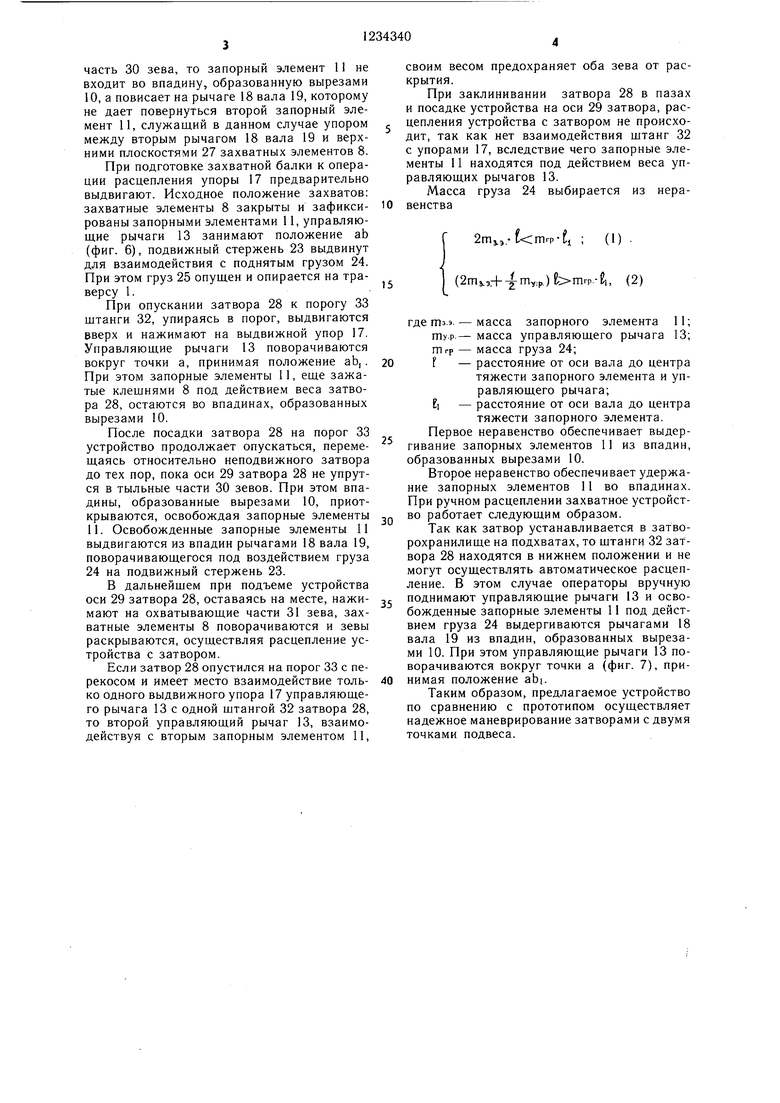
На фиг. 1 изображено aaxBaiHoe устройство с закрыт1)1мн захватами; на фиг. 2 - разрез А А на ))пг. 1; на фиг. 3 разрез Б-Б на (jjiir. 1; на (})И. 1 узел 1 на фиг. 2; на ((). 5 захватное устройство в .момент за- iKMi.ii iii: / с : ,агнором; на ()и. 6 то же, нри распл п ч1ии с за1вором; на фи1 . 7 - то же, нри ручном раснеплении с затвором.
Захватное уст()ойство содержит траверсу 1 с нроун1инами 2 д;1я соединения с подвесками грузонод емного крана (не показаны) и захваты 3, каждый из которых включает корнус 4, состоящий из двух щек 5, соединенных между собой болтами 6. Каждый корпус 4 с помо1цью оси 7 закреплен на тра- iirpce 1. (Л1изу в корпусе 4 симметрично установлены два захватных элемента 8,вращающихся на осях 9 и имеющих в хвостовой части ны;)сзы К), которые в закрытом поло- / Кснин ..ахиата образуют впадину, куда вхо- .;И1 занорный элемент 11, фиксирующий ;лкр|,1тос положение захватных элементов 8. а 1орный элемент 11 смонтирован в направ- v;i()HiHX 12 с возможностью взаимодействия г унравляюнд.им рычагом 13, на одном конце кого)ого закреплен противовес 14, подвеншн- ный с помощью гибкого элемента (нанри- мс(), непи) 15 к траверсе 1. На втором конце у||ра15;1ЯЮ1це1 о рычага 13 также может быть закреплен гибкий элемент (цепь) 16, свободно 11одвеп1енный к траверсе 1. Между противовесом 14 и запорным элементом 11 па у11ра1 ,,-|яю1цем рычаге 13 установлен выдвижной упор 17.
Занорпые элементы И закреплены uiap- пирио па концах рычагов 18, смонтированных па валу 19 и размещенных в горизонтальной плоскости, причем посадочные отверстия 20 запорных элементов 11 представляют собой в продольном сечении прорези, выпол- iiL MHbic по радиусу R, равному расстоянию 01 оси 7 до оси рычага 18, что обеспечивает некоторую подвижность каждого из занорных элементов 11 с корпусом 4 относительно ненодвижного в соответствующей
относительно оси вала дополнительным грузом для взаимодействия с вторым концом стержня.
3
5 0 5 о
плоскости вала 19, установленного в подщип- никах 21 траверсы 1. Вал 19 предназначен для обеспечения взаимосвязанного перемещения обоих запорных элементов 11 и, следовательно, взаимосвязанной работы обоих захватов 3. В поперечном отверстии 22 вала 19 размещен в горизонтальной нлоекости подвижный стержень 23, взаимодействующий поочередно с одним из грузов 24 и 25, размещенных по обе стороны от вала 19 в вертикальных направляющих 26 траверсы 1. Грузы 24 и 25 обеспечивают соответственно надежное выдергивание и вход запорных элементов 11.
Захватное устройство работает следующим образом.
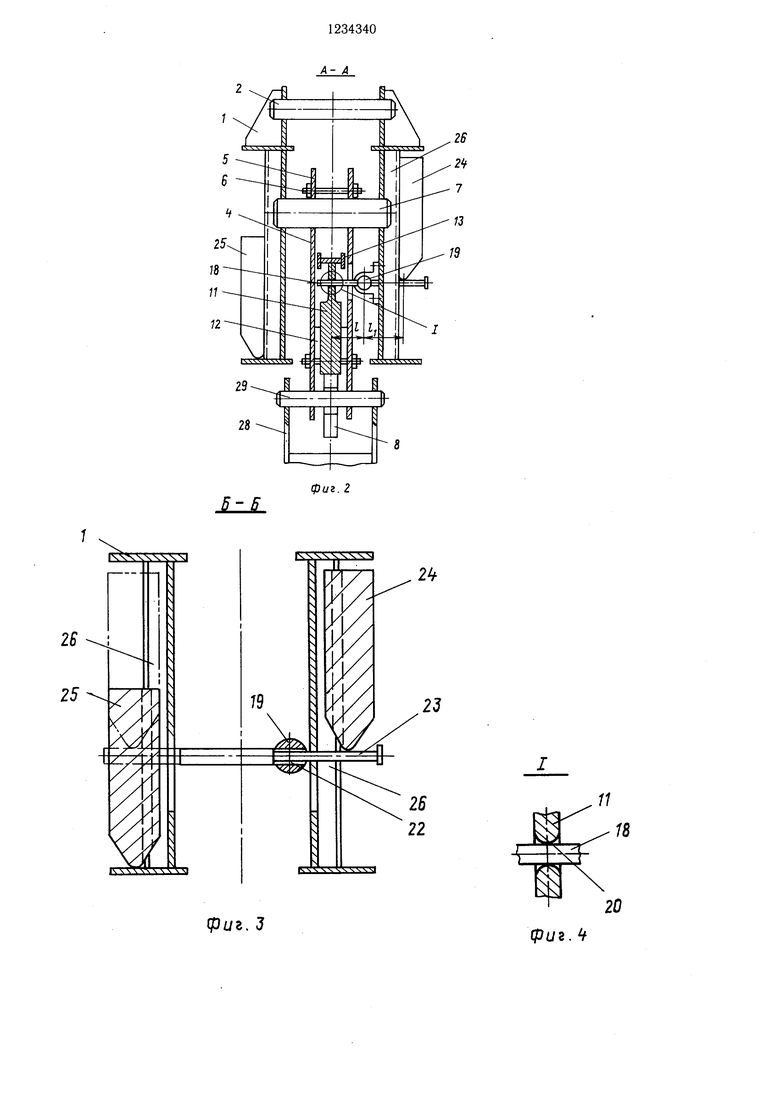
При подготовке захватного устройства к операции зацепления (фиг. 5) выдвижные упоры 17 управляющих рычагов 13 предварительно вдвигают, а стержень 23 выдвигают для взаимодействия с поднятым грузом 25. Второй груз 24 при этом опущен и опирается на траверсу 1.
Исходное положение захватов 3: зев захватных элементов 8 раскрыт, запорные элементы 11 опираются на верхние плоскости 27 захватных элементов 8, управляющие рычаги 13 занимают положение аЬ.
При опускании захватной балки на гидрозатвор 28 оси 29 затвора входят в зевы захватных элементов 8 и нажимают на тыльную часть 30 зева. Захватные элементы 8 поворачиваются, при этом передние охватывающие части 31 зева сходятся, а хвостовые части захватных элементов 8 расходятся. Впадины, образованные вырезами 10, раскрываются и в них под действием управляющих рычагов 13, груза 25 и собственного веса входят запорные элементы И. При этом управляющие рычаги 13 не взаимодействуют со щтангами 32 затвора 28, так как упоры 17 вдвинуты.
В дальнейщем при подъеме устройства оси 29 затвора 28 нажимают на охватывающие части 31 зевов, в результате чего боковые поверхности вырезов 10 сжимают запорные элементы 11, которые таким образом фиксируют захватные элементы в закрытом положении.
Если устройство опускается на затвор 28 с перекосом и имеет место закрытие зева только одного из захватов 3 вследствие воздействия одной из осей 29 затвора 28 на тыльную
часть 30 зева, то запорный элемент 11 не входит во впадину, образованную вырезами
10,а повисает на рычаге 18 вала 19, которому не дает повернуться второй запорный элемент 11, служащий в данном случае упором между вторым рычагом 18 вала 19 и верхними плоскостями 27 захватных элементов 8.
При подготовке захватной балки к операции расцепления упоры 17 предварительно выдвигают. Исходное положение захватов: захватные элементы 8 закрыты и зафикси- рованы запорными элементами 11, управляющие рычаги 13 занимают положение аЬ (фиг. 6), подвижный стержень 23 выдвинут для взаимодействия с поднятым грузом 24. При этом груз 25 опущен и опирается на траверсу 1.
При опускании затвора 28 к порогу 33 штанги 32, упираясь в порог, выдвигаются вверх и нажимают на выдвижной упор 17. Управляющие рычаги 13 поворачиваются вокруг точки а, принимая положение аЬ,. При этом запорные элементы 11, еще зажатые клешнями 8 под действием веса затвора 28, остаются во впадинах, образованных вырезами 10.
После посадки затвора 28 на порог 33 устройство продолжает опускаться, перемещаясь относительно неподвижного затвора до тех пор, пока оси 29 затвора 28 не упрутся в тыльные части 30 зевов. При этом впадины, образованные вырезами 10, приоткрываются, освобождая запорные элементы
11.Освобожденные запорные элементы 11 выдвигаются из впадин рычагами 18 вала 19, поворачивающегося под воздействием груза 24 на подвижный стержень 23.
В дальнейщем при подъеме устройства оси 29 затвора 28, оставаясь на месте, нажи- мают на охватывающие части 31 зева, захватные элементы 8 поворачиваются и зевы раскрываются, осуществляя расцепление устройства с затвором.
Если затвор 28 опустился на порог 33 с перекосом и имеет место взаимодействие толь- ко одного выдвижного упора 17 управляющего рычага 13 с одной штангой 32 затвора 28, то второй управляющий рычаг 13, взаимодействуя с вторым запорным элементом 11,
своим весом предохраняет оба зева от раскрытия.
При заклинивании затвора 28 в пазах и посадке устройства на оси 29 затвора, расцепления устройства с затвором не происходит, так как нет взаимодействия штанг 32 с упорами 17, вследствие чего запорные элементы 11 находятся под действием веса управляющих рычагов 13.
Масса груза 24 выбирается из неравенства
2mj.5.- 1 гпгр- 1 ; (I) . (,-f-|-m,,..p.)E.mrp.-,, (2)
0
где шз.э. - масса запорного элемента 11; шу.р- масса управляющего рычага 13; Шгр - масса груза 24; f - расстояни е от оси вала до центра тяжести запорного элемента и управляющего рычага; I - расстояние от оси вала до центра
тяжести запорного элемента. Первое неравенство обеспечивает выдергивание запорных элементов 11 из впадин, образованных вырезами 10.
Второе неравенство обеспечивает удержание запорных элементов 11 во впадинах. При ручном расцеплении захватное устройство работает следующим образом.
Так как затвор устанавливается в затво- рохранилище на подхватах, то щтанги 32 затвора 28 находятся в нижнем положении и не могут осуществлять автоматическое расцепление. В этом случае операторы вручную поднимают управляющие рычаги 13 и освобожденные запорные элементы 11 под действием груза 24 выдергиваются рычагами 18 вала 19 из впадин, образованных вырезами 10. При этом управляющие рычаги 13 поворачиваются вокруг точки а (фиг. 7), принимая положение abi.
Таким образом, предлагаемое устройство по сравнению с прототипом осуществляет надежное маневрирование затворами с двумя точками подвеса.
4- А
28
5-5
фиг. 2
(рае. J
//
/8
:ЙNS
20
(риг.
17 I
Фиг.7
Составитель т. Губина
Редактор В. КовтунТехред И. Верес Корректор Е. Рошко
Заказ 2691/26Тираж 799Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная. 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевой захват захватной балки | 1974 |
|
SU541770A1 |
| Захватная балка для маневрирования гидротехническими затворами с выдвижными штангами | 1978 |
|
SU732440A1 |
| Грузозахватное устройство В.К.Петрова | 1980 |
|
SU950654A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Захватное устройство | 1985 |
|
SU1306887A1 |
| Грузозахватное устройство | 1989 |
|
SU1776623A1 |
| Устройство захватной балки для подъема и опускания шандорных затворов в гидротехнических сооружениях | 1929 |
|
SU14799A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2009978C1 |

| Клещевой захват захватной балки | 1974 |
|
SU541770A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
