5 . 2
зволяет производить захват и выгрузку изделий, а также перемещение каретки 2 от одного привода 6, а фиксирование изделия в захватном устройстве обеспечивается пружинами 21. Захватное устройство выполнено в виде клещевого захвата, состоящего из двух двуплечих рычагов 11 и 12, подвешенных каждый на своей оси 15 и 1б и пружин 21, воздействующих на эти рычаги
11 и 12 захвата. При этом пружины 21 закреплены так, что их усилие может смыкать челюсти клещевого захвата, а также размыкать. Управление клещевым захватом производится автоматически на рабочих местах, обслуживаемых автооператором. На одном клещи сжимаются - изделие захватывается, на другом клещи разжимаются - изделие опускается.3 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Пистолет для приварки шпилек | 1977 |
|
SU733908A1 |
| Устройство для подачи материала в рабочую зону пресса | 1983 |
|
SU1346305A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Устройство для изготовления ремней | 1990 |
|
SU1715708A1 |
| Автомат для сборки и сварки скребков со звеньями цепи | 1981 |
|
SU1004057A1 |
| Устройство для прерывистой подачи материала | 1971 |
|
SU515555A1 |
| ЛЕСОПОСАДОЧНАЯ МАШИНА | 1992 |
|
RU2054235C1 |
| Технологический модуль для объемной штамповки | 1988 |
|
SU1648607A1 |
| Автооператор | 1986 |
|
SU1364430A1 |
Изобретение относится к области станкостроения и машиностроения, а именно к автооператорам для передачи изделий с одного рабочего места на другое и может быть применено при работе во вредных условиях. Целью изобретения является повышение надежности при удержании груза. Это достигается тем, что захватное устройство позволяет производить захват и выгрузку изделий, а также перемещение каретки 2 от одного привода 6, а фиксирование изделия в захватном устройстве обеспечивается пружинами 21. Захватное устройство выполнено в виде клешевого захвата, состоящего из двух двуплечих рычагов 11 и 12, подвешенных каждый на своей оси 15 и 16, и пружин 21, воздействующих на эти рычаги 11 и 12 захвата. При этом пружины 21 закреплены так, что их усилие может смыкать челюсти клещевого захвата, а также размыкать. Управление клещевым захватом производится автоматически на рабочих местах, обслуживаемых автооператором. На одном клещи сжимаются - изделие захватывается, на другом клещи разжимаются - изделие опускается. 3 ил.
Изобретение бтносится к станкостроению и машиностроению, а именно к автооператорам для передачи изделий с одного рабочего места на другое, и может быть применено в отраслях с вредными условия- ми работы, где необходима подача иэделий без присутствия человека, с автоматической загрузкой и разгрузкой их в необходимых местах.
Целью изобретения является повыше- ние надежности при удержании груза в захватном устройстве.
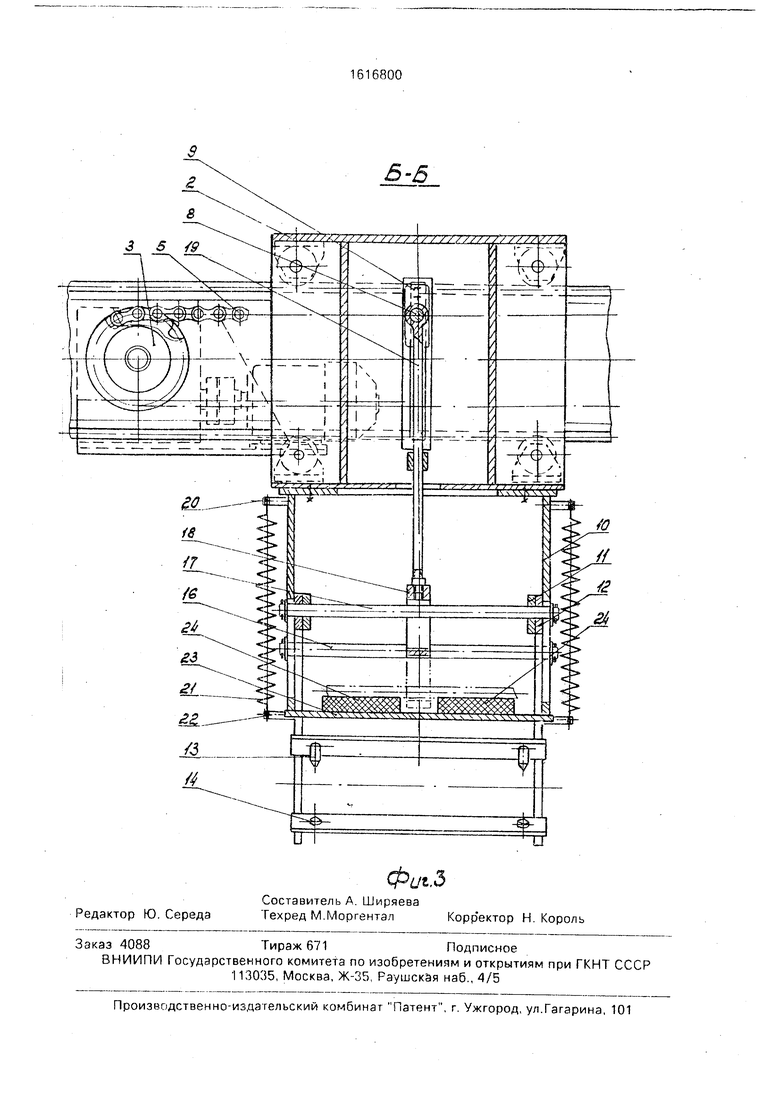
На фиг.1 схематично изображен предлагаемый автооператор; на фиг,2 - разрез А-А на фиг. 1; на фиг.З - разрез Б-Б на фиг,2.
Автооператор имеет основание в виде балки 1 с направляющими для перемещения каретки 2, на балке 1 размещен привод перемещения каретки, включающий цеп- ную передачу с ведущей (приводной) звез- ДОЧКОЙ 3, ведомой звездочкой 4 и цепью 5, а также привод 6 и натяжное устройство 7, установленные соответственно по концам балки 1. На цепи закреплен поводок 8, входящий в камень 9, который имеет возмож- ность перемещаться в направляющем пазу каретки 2. К каретке 2 прикреплен каркас 10, на котором смонтировано захватное устройство в виде клещевого захвата. Захват состоит из двух двуплечих рычагов 11 и 12, оснащенных зажимными элементами, на-, пример сменными кернами 13 и 14, рассчй- танными на зажим разных по размеру изделий. Двуплечие рычаги 11 и 12, являясь сварными пространственными конструкци- ями, свободно установлены в каркасе 10 и подвешены на осях 15 и 16, Вторые плечи двухплечих рычагов 11 и 12 имеют пазы, через которые проходитперекладина 17управления двуплечими рычагами. Перекла- дина 17 помещена в вертикальные пазы каркаса 10 и заведена в петлю 18, связанную тягой 19 с поводком 8. Петля 18 Имеет паз. Каркас 10 оснащен стойками 20, на которых установлены четыре пружины 21, попарно воздействующие на двуплечие рычаги 11 и 12 через посредство стоек 22,
которыми оснащены эти двуплечие рычаги
11и 12, Причем пружины 21 закреплены с возможностью перехода мёртвой точки, а именно точки закрепления пружин 21 (центры стоек 20) на каркасе 10 находятся на одной прямой с осями 15 и 16 подвески двухплечих рычагов 11 и 12, делящей угол качания пружин 21 на две части. Такое размещение пружин 21 обеспечивает приложение их усилия как на закрытие рычагов 11 и
12(челюстей) клещевого захвата, так и на разжим их. Каркас 10 - сварная конструкция замыкается планкой 23, на которой установлены резиновые демпферы 24.
Автооператор работает следующим образом.
Привод 6, размещенный на балке 1, все время вращается в одну сторону. Поводок 8, закрепленный на цепи 5, воздействуя через .камень 9 на направляющий паз каретки 2, перемещает последнюю вдоль балки 1 по направляющим, поводок 8, подойдя к той или иной звездочке (3 или 4), начнет ее огибать с цепью и переместится таким образом в вертикальной плоскости на величину диаметра звездочки, С переходом поводка 8 с одной ветви цепи на другую и наоборот реверсируется движение каретки 2. Каретка 2 совершает челночные движения на балке 1, При переходе поводка 8 с вет;ви на ветвь поводок с камнем 9 перемещается в направляющем пазу каретки 2 и через посредство тяги 19 и петли 18 воздействует на перекладину 17 управления двуплечими рычагами 11 и 12. Перекладина 17, перемещаясь в направляющих пазах каркаса 10, поворачивает симметрично двуплечие рычаги 11 и 12 на осях 15 и 16, закрывая или открывая клещевой захват. Причем поводок 8, тяга 19 и петля 18 доводят двухплечие рычаги 11 и 12 клещевого захвата лишь до среднего положения, при этом преодолевая натяжение пружин 21, а затем пружины 21, пройдя через мертвую точку - центр качания двухплечих рычагов 11 и 12 клещей, сами откроют или закроют клещи. Для обеспечения быстродействия захватного устройства, а также предотвращения нагружения тяги 19 неблагоприятной нагрузкой - сжатием, в петле 18 выполнен паз, длина которого несколько больше половины вертикального хода поводка 8 в направляю- щем пазу каретки 2.
Таким образом, при работе автооператора привод вращается все время в одну сторону, карелка совершает челночные ходы по балке 1. В начале и в конце ходов, когда каретка 2 реверсируется, происходит автоматическое смыкание или размыкание зажимных элементов клещевого захвата - изделие автоматически захватывается.на одном рабочем месте, переносится на вто- рое рабочее место, где автоматически выпускается из захватного устройства, Формула изобретения Автооператор, содержащий основание с направляющими, каретку, установленную
на направляющих, привод перемещения каретки; включающий цепную передачу, на цепи которой жестко закреплен поводок, шарнирно соединенный с ползуном, установленным в направляющем пазу каретки, и захватное устройство,отличающийся тем, что, с целью повышения надежности при удержании груза в захватном устройстве, захаатное устройство выполнено в виде клещевого захвата, состоящего из зажимных элементов, двухплечих рычагов, шарнирно установленных на соответствующих осях, закрепленных на каретке, и пружин, закрепленных соответственно на каретке и на этих рычагах с возможностью перехода мертвой точки, причем один из свободных концов каждого двухплечего рычага шарнирно связан с ползуном привода перемещения каретки, а его другой конец связан с соответствующим зажимным элементом.
Фиг. Т
| Автооператор | 1975 |
|
SU549314A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
