1
Изобретение относится к области металлургии, в частности эпектродуговым печам, например, для выплавки стали.
Расширение области промышленного применения электродуговых печей сопровождается совершенствованием, конструкции установок и их элементов. Одним из важнейших механизмов в этих конструкциях является механизм перемещения электродов, который имеет большие габариты и вес, причем стоимость его составляет существенную часть обшей стоимости элек- тропечной установки.
Известно устройство для перемещения электрода в электрошлаковой печи, которое одновременно служит и токоподводом к электроду. Устройство включает два гусеничных конвейера из водоохлаждаемых токоподводяших звеньев, между которыми зажат электрод, и привод синхронного вращения конвейеров навстречу друг дру- ГУ 1.
Однако в таких устройствах электрод зажат в токоподводяших конвейерах через пружины, которые не могут обеспечить
надежного зажи.;а по Bceii контактной поверхности. Это может привести к появлению больших контактных сопротивлений на отдельных участках контактной поверхности, вызвать местные перегревы электрода и звеньев конвейеров, послужить причиной повышенного расхода электроэнергии,
С целью надежного зажима электрода по всей контактной поверхности предлагаемое устройство снаблхено параллелограк - мной шарнирно-рычажной системой, при этом звездочки конвейеров кинематически связаны с шарнирами, расположенными на внешних тягах параллелограммной шарнирно-рычажной системы, а сама шарнирно-рычажная cjicTei ;a консольно закреплена на валу привода.
Кроме того, с целью разжима и фикса-
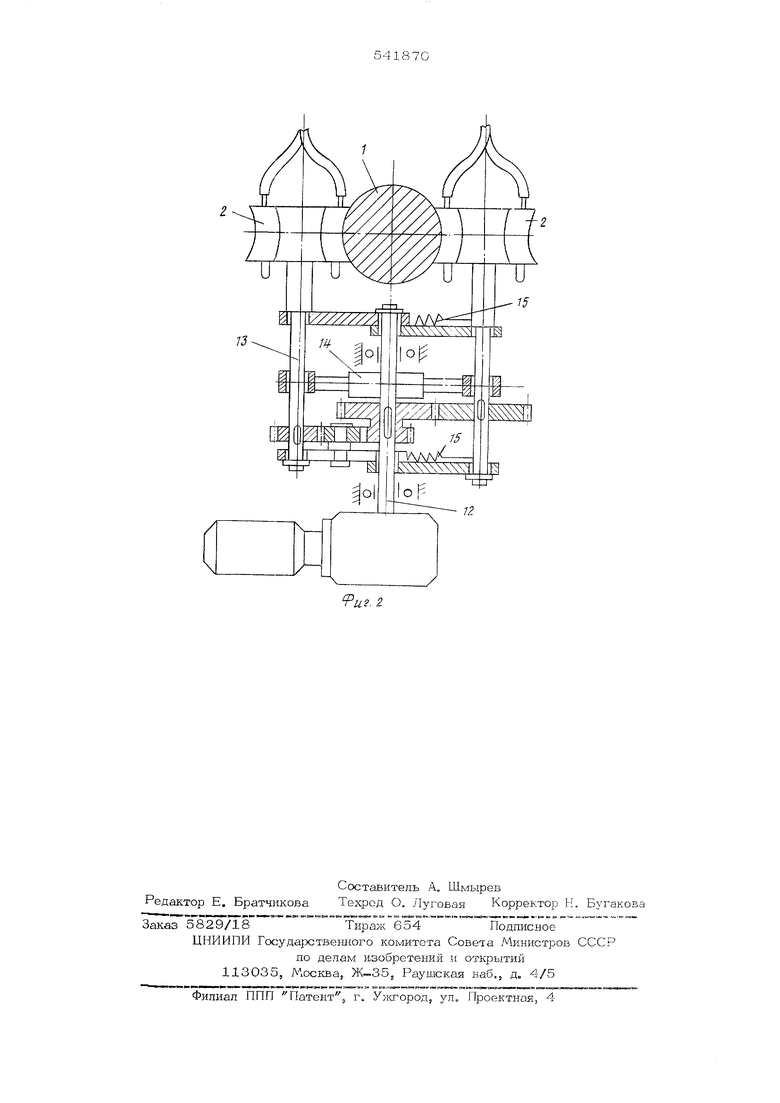
0 ции электрода параллелограммная шарнирно-рычажная система снабжена пружиннопневматическим зажимом, кинематически связанным, с ее внешними тягами, а звездочки попарно связаны пружинами в направлении, перпендикулярном продольной эси (оси электрода и установлены на своих осях с люфтами. На фиг, 1 изображен общий вид предложенного устройства; на фиг,, 2 то же вид сверху. Электрод 1 зажат м.ежду двумя гусени ными конвейерами 2, образованными токоподводящими звеньями 3. Звездочки 4 конвейеров 2 кинематически связаны с нирами 5, расположенными на внешних тя гах 6. Шарниры 5 и тяги 6 составляют д раллелограммную шарнирно-рычажную сис тему, куда входят такие рычеги 7, 8 и т ги 9, соединенные шарнирамл 10 и 11. Параплепограммная шарнирно-рычажная система своими шарнирами 11 консольно закреплена на валу 12 привода синхронного вращения конвейеров 2 1-газстреч дру5 другу. Тяги 6 через тяги 13 кинематически связапь с поулшнно-пне.вмати ческим зажимом 14, Звездочки 4 конвейеров 2 попарно свя заны пружинакда 15 и устшювлекы на сво их осях с люфтами. Устройство работает следующим обра- зом. При синхронном вращении Гусепкчньк конвейеров 2 навстречу друг друту электрод 1, зажатый между водэохлаждае- мыми токэподводящими звеньями 3, перемещается вверх или вниз, в зависимости от направления враидения конвейеров 2, Синхронное вращение конвейерэв на- встречу друг друту обеспечивается путем передачи движения от вала 12 привода че рез систему зубчатых кэлес на звездочки 4. Конвейеры 2 прижимаются к электроду 1 или отжнмаются от нет с помошью нараллелограммнои шарнирно-рычажной системы, состоящей из тяг 6 и 9 и рьгча гов 7 и 8, соеднненных меходу собой шао нирами 5 и 10. При зажиме электрода 1 шарниры 5 и 10 перемещаются вверх, углы между рычагами 7 и 8 уменьшаются, тяга поднимается, а 6, пара.гшельные оси электрода 1, перемещаются назстречу друг другу в направлении, перпендикулярном оси электрода 1, оставаясь параллельными друг другу. Тяги 6 увлекают за собой кинематически связанные с ними звездочки 4 конвейеров 2, что и обе :;нечивает равномерный и надежный зажим электрода 1 но всей комнатной новер:хнссти то конодводящлми звеньями 3, находящимися на обращенных к электроду 1 ветвях конвейеров 2, При разжиме электрода 1 шарниры 5 и 10 перемещаются вниз, углы между рычагами 7 и 8 увеличиваются, тяга 9 опускается, а тяги 6, с которыми кинематически связаны звездочки 4, расходятся J разжимая электрод 1. ление разжимом и фиксацией электрода 1 осуществляется с помошью пружиннопневматического зажима 14, который раздвигает или стягивает тяги 6 и кинематически связанные с ними звездочки 4 конвейеров 2. В случае некоторой конусности электрода 1 под действием пружин 15 выбираются лкх{)ты5 с которыми установлены звездочки 4 на своих осях, и конвейер51ые ленты 2 плотно прилегают к noBepxjiocTH электрода 1. Формула изобретения 1 „ Устройство для неремешения элек трода электропечи, содержащее два гусеничных конвейера из во.доохлаждаемых токонодводяшнх звеньев и привод синхронного вращения конвейеров навстречу др5г другу, отличающееся тем, что, с нелью надежного зажима электрода но всей контактной поверхности, оно снабжено консольно закрепленной на валу привода паралнелограммной шарнирно-рычажной системой, шарниры которой расположены на внешних тягах системы и кинематически связаны со звездочками конвейеров. 2, Устройство но п, 1, отличающееся тем, что шарнирно-рычажная система снабжена пружинно-пневматическим зажимом, кинематически связанным с ее внешними тягами. 3„ Устройство по п. 1, о т л и ч а юш, е е с я тем, что звездочки попарно связаны нружинами в направлении,перпендикулярном продольной оси, и установлены на своих осях с люфтами. Источник информации, принятый во вниание нрн экспертизе: 1„ Авторское свидетельство СССР о 241471, кл. С 21 5/56
/
Фиг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки и сварки кузовов легковых автомобилей | 1974 |
|
SU516336A3 |
| ВЕЛОСИПЕД С ЛИНЕЙНЫМ ПРИВОДОМ | 2008 |
|
RU2400391C2 |
| Устройство для центрирования ленточного материала | 1990 |
|
SU1726603A1 |
| Устройство для цоколевания коммутаторных ламп | 1977 |
|
SU736217A1 |
| Стенд для контроля осевого люфта конических подшипников вала редуктора | 1988 |
|
SU1538022A1 |
| КРУГЛОПИЛЬНЫЙ СТАНОК для ПРОДОЛЬНОЙ РАСПИЛОВКИ БРЕВЕН | 1969 |
|
SU246022A1 |
| Проходная мездрильная машина | 1989 |
|
SU1723136A1 |
| Установка для аргонодуговой сварки поворотных стыков труб неплавящимся электродом с подачей присадочной проволоки | 1990 |
|
SU1776528A1 |
| Секционный конвейер транспортно-накопительной системы | 1989 |
|
SU1691238A1 |
| Транспортный промышленный робот | 1987 |
|
SU1743845A1 |