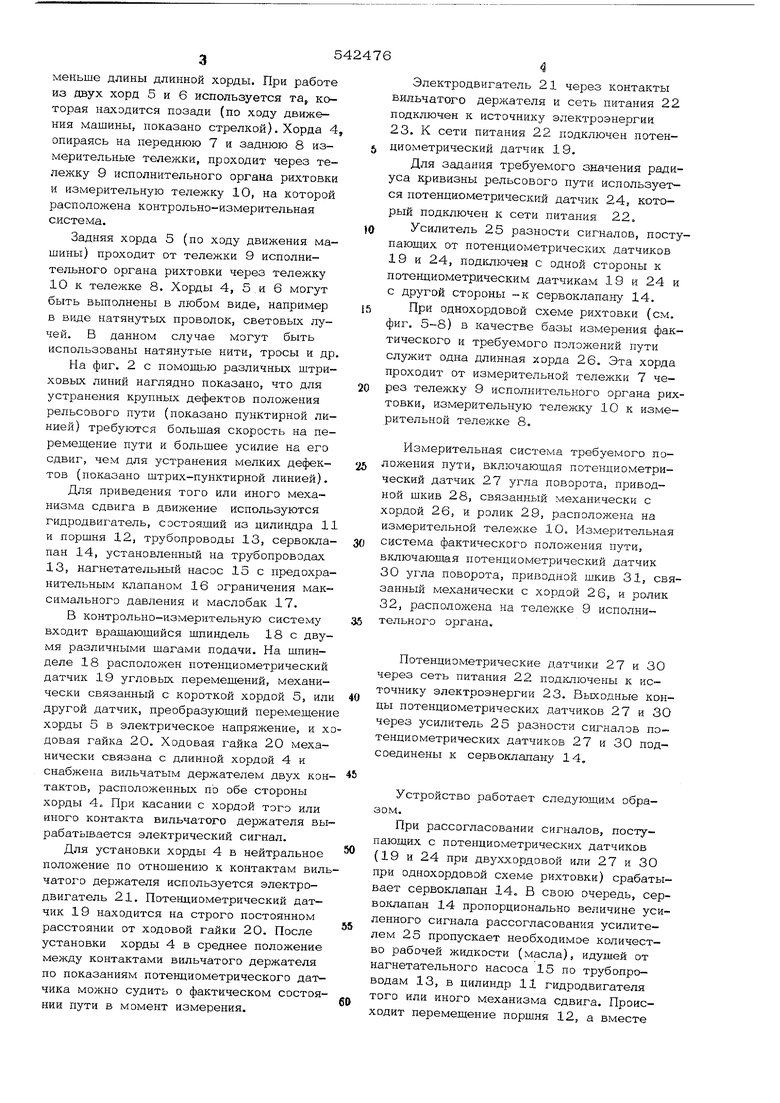
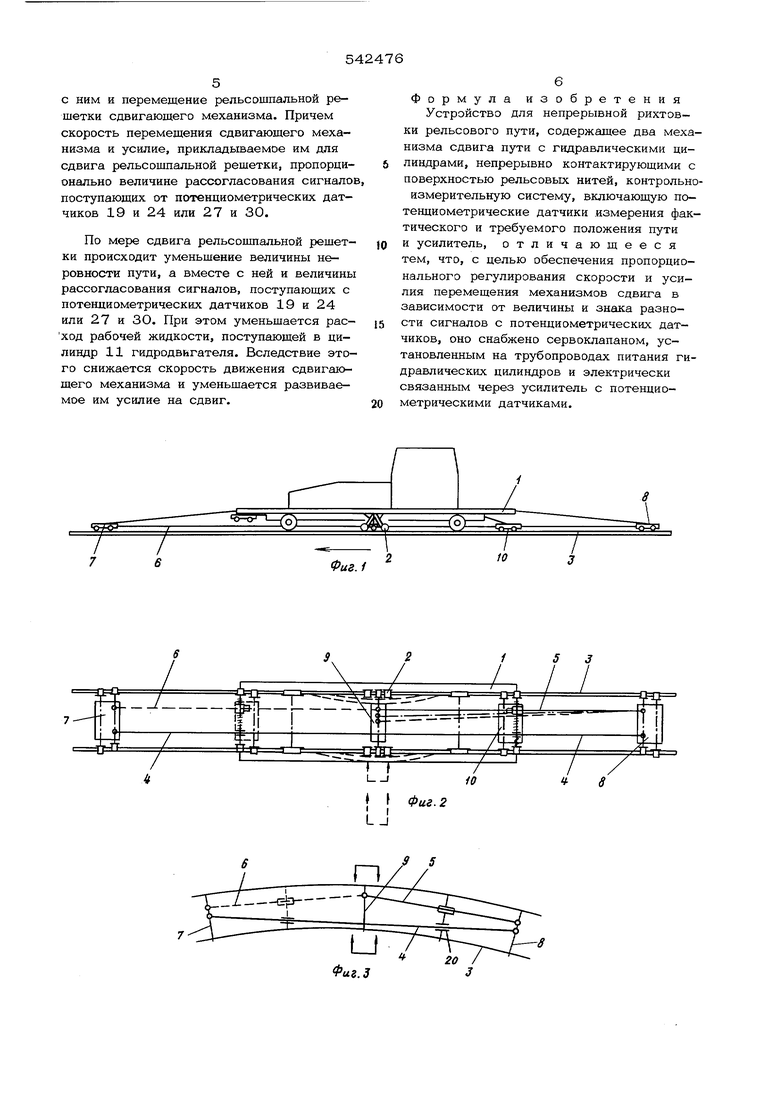
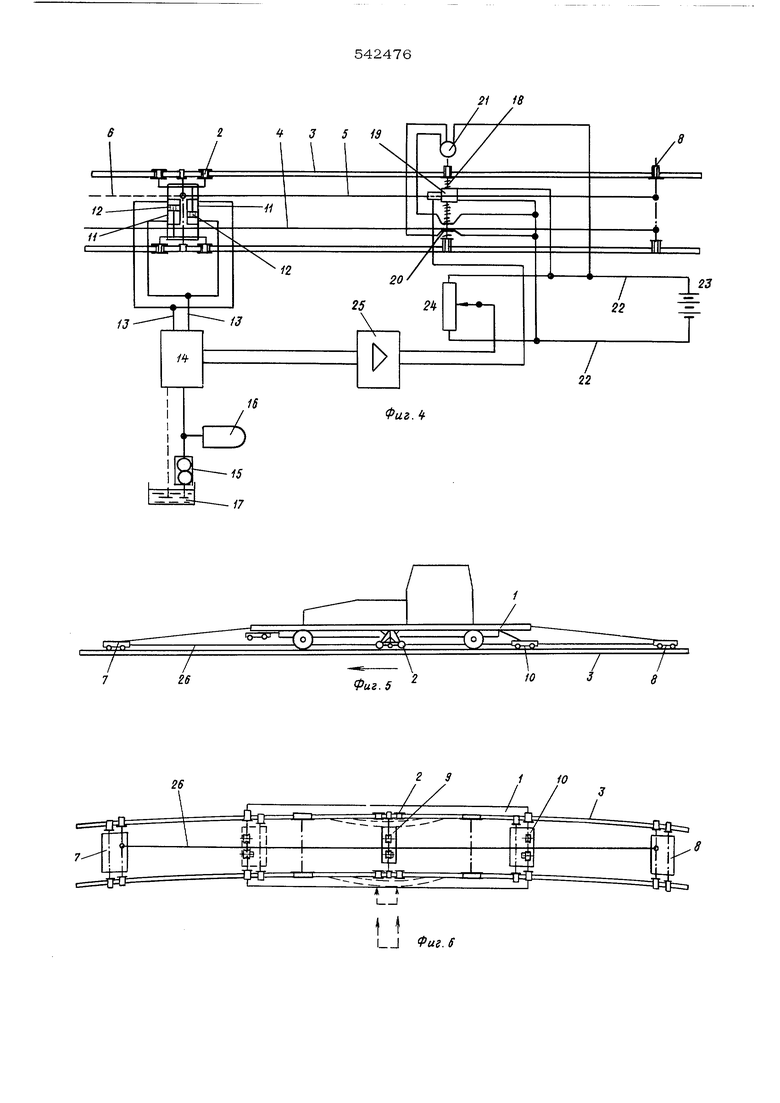
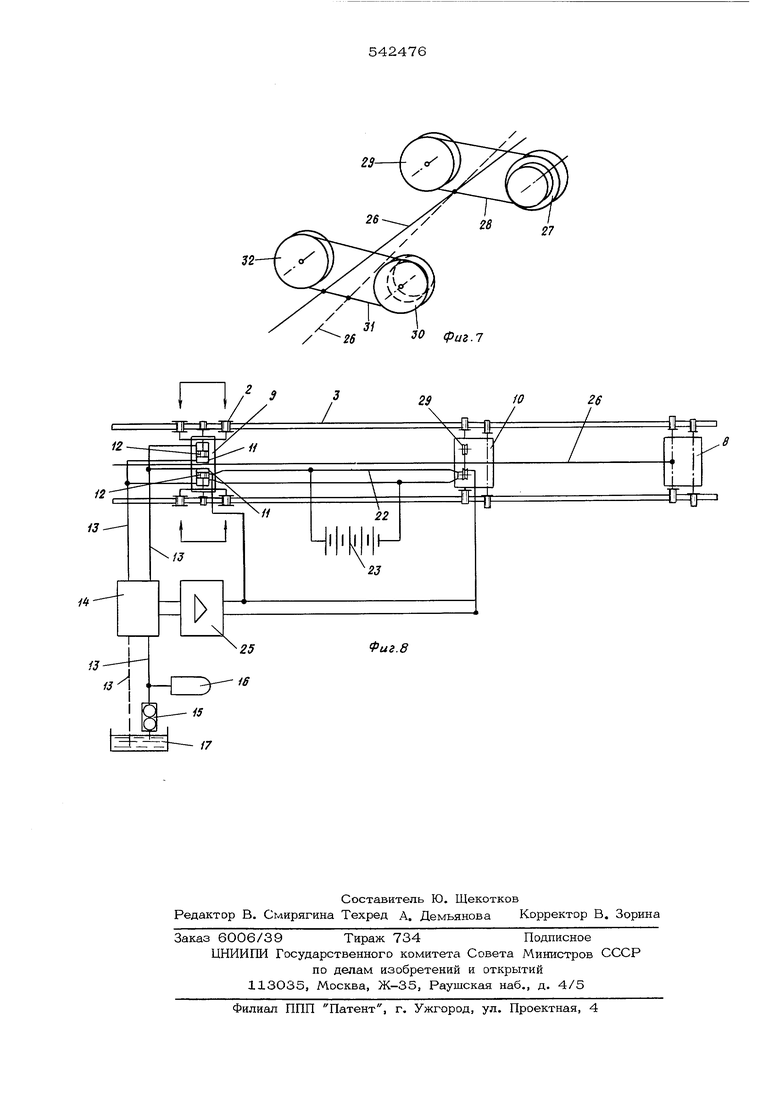
(54) УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОЙ РИХТОВКИ РЕЛЬСОВОГО ПУТИ 5 меньше длины длинной хорды. При работе из двух хорд 5 и 6 используется та, которая находится позади (по ходу движения машины, показано стрелкой). Хорда 4, опираясь на переднюю 7 и заднюю 8 измерительные тележки, проходит через тележку 9 исполнительного органа рихтовки и измерительную тележку 10, на которой расположена контрольно-измерительная система. Задняя хорда 5 (по ходу движения машины) проходит от тележки 9 исполнительного органа рихтовки через тележку 10 к тележке 8. Хорды 4, 5. и 6 могут быть выполнены в любом виде, например в виде натянутьк проволок, световых лучей. В данном случае могут быть использованы натянутые нити, тросы и др На фиг. 2 с помощью различных штриховых линий наглядно показано, что для устранения крупных дефектов положения рельсового пути (показано пунктирной линией) требуются большая скорость на перемешение пути и большее усилие на его сдвиг, чем для устранения мелких дефектов (показано штрих-пунктирной линией). Для приведения того или иного механизма сдвига в движение используются гидродвигатель, состоящий из цилиндра 11 и поршня 12, трубопроводы 13, сервоклапан 14, установленный на трубопроводах 13, нагнетательный насос 15 с предохранительным клапаном 16 ограничения максимального давления и маслобак 17. В контрольно-измерительную систему входит вращающийся шпиндель 18 с двумя различными шагами подачи. На шпинделе 18 расположен потенциометрический датчик 19 угловых перемещений, механически связанный с короткой хордой 5, ил другой датчик, преобразующий перемещени хорды 5 в электрическое напряжение, и х довая гайка 20. Ходовая гайка 20 механически связана с длинной хордой 4 и снабжена вильчатым держателем двух кон тактов, расположенных по обе стороны хорды 4. При касании с хордой того или иного контакта вильчатого держателя вы рабатывается электрический сигнал. Для установки хорды 4 в нейтральное положение по отношению к контактам вил чатого держателя используется электродвигатель 21. Потенциометрический датчик 19 находится на строго постоянном расстоянии от ходовой гайки 20. После установки хорды 4 в среднее положение между контактами вильчатого держателя по показаниям потенцнометрического датчика можно судить о фактическом состоянии пути в момент измерения. Электродвигатель 21 через контакты вильчатого держателя и сеть питания 22 подключен к источнику электроэнергии 23. К сети питания 22 подключен потенциометрический датчик 19. Для задания требуемого значения радиуса кривизны рельсового пути используется потенциометрический датчик 24, который подключен к сети питания 22. Усилитель 25 разности сигналов, поступающих от потенциометрических датчиков 19 и 24, подключен с одной стороны к потенциометряческим датчикам 19 и 24 и с другой стороны -к сервоклапану 14. При однохордовой схеме рихтовки (см. фиг. 5-8) в качестве базы измерения фактического и требуемого положений пути служит одна длинная хорда 26. Эта хорда проходит от измерительной тележки 7 через тележку 9 исполнительного органа рихтовки, измерительную тележку 10 к измерительной тележке 8. Измерительная система требуемого положения пути, включающая потенциометрический датчик 27 угла поворота, приводной шкив 28, связанный механически с хордой 26, и ролик 29, расположена на измерительной тележке 1О. Измерительная система фактического положения пути, включающая потенциометрический датчик 30 угла поворота, приводной шкив 31, связанный механически с хордой 26, и ролик 32, расположена на тележке 9 исполнительного органа. Потенциометрические датчики 27 и 30 через сеть питания 22 подключены к источнику электроэнергии 23. Выходные концы потенциометрических датчиков 27 и 30 через усилитель 25 разности сигналов потенциометрических датчиков 27 и 30 подсоединены к сервоклалану 14, Устройство работает следующим образом. При рассогласовании сигналов, поступающих с потенциометрических датчиков (19 и 24 при двуххордовой или 27 и 30 при однохордовой схеме рихтовки) срабатывает сервоклапан 14. В свою очередь, сервоклапан 14 пропорционально величине усиленного сигнала рассогласования усилителем 25 пропускает необходимое количество рабочей жидкости (масла), идушей от нагнетательного насоса 15 по трубопроводам 13, в цилиндр 11 гидродвигателя того или иного механизма сдвига. Происходит перемещение поршня 12, а вместе с ним и перемещение рельсошпальной решетки сдвигающего механизма. Причем скорость перемещения сдвигающего механизма и усилие, прикладываемое им для сдвига рельс ошпальной решетки, пропорционально величине рассогласования сигнало поступающих от потенциометрических датчиков 19 и 24 или 27 и 30. По мере сдвига рельсошпальной решетки происходит уменьшение величины неровности пути, а вместе с ней и величины рассогласования сигналов, поступающих с потендиометрических датчиков 19 и 24 или 27 к ЗО. При этом уменьшается рас- ход рабочей жидкости, поступающей в цилиндр 11 гидродвкгателя. Вследствие этого снижается скорость движения сдвигающего механизма и уменьшается развиваемое им усилие на сдвиг. 6 Формула изобретения Устройство для непрерывной рихтовки рельсового пути, содержащее два механизма сдвига пути с гидравлическими цилиндрами, непрерывно контактируюшими с поверхностью рельсовых нитей, контрольноизмерительную систему, включающую потенциометрические датчики измерения фактического и требуемого положения пути и усилитель, отличающееся тем, что, с целью обеспечения пропорционального регулирования скорости и усилия перемещения механизмов сдвига в зависимости от величины и знака разности сигналов с потенциометрических датчиков, оно снабжено сервоклапаном, установленным на трубопроводах питания гидравлических цилиндров и электрически связанным через усилитель с потенциометрическими датчиками.
Фиг.1
ц.о;
10
5 3
L
2 3
X
1 I
II Pug. S
/ 26
27
фиг.7
