ная растяж-ка проходит через заднюю точку 18 по направляющему ролику 19, установленному в верхней части несущей тяги 13. Вместо натяжной пружины 17 могут быть предусмотрены, например, гидравлически или пневматически нагружаемые натяжные щилиндры. Для агрегатов рихтовки 6 также предусмотрена система отсчета (на чертеже не изображена).
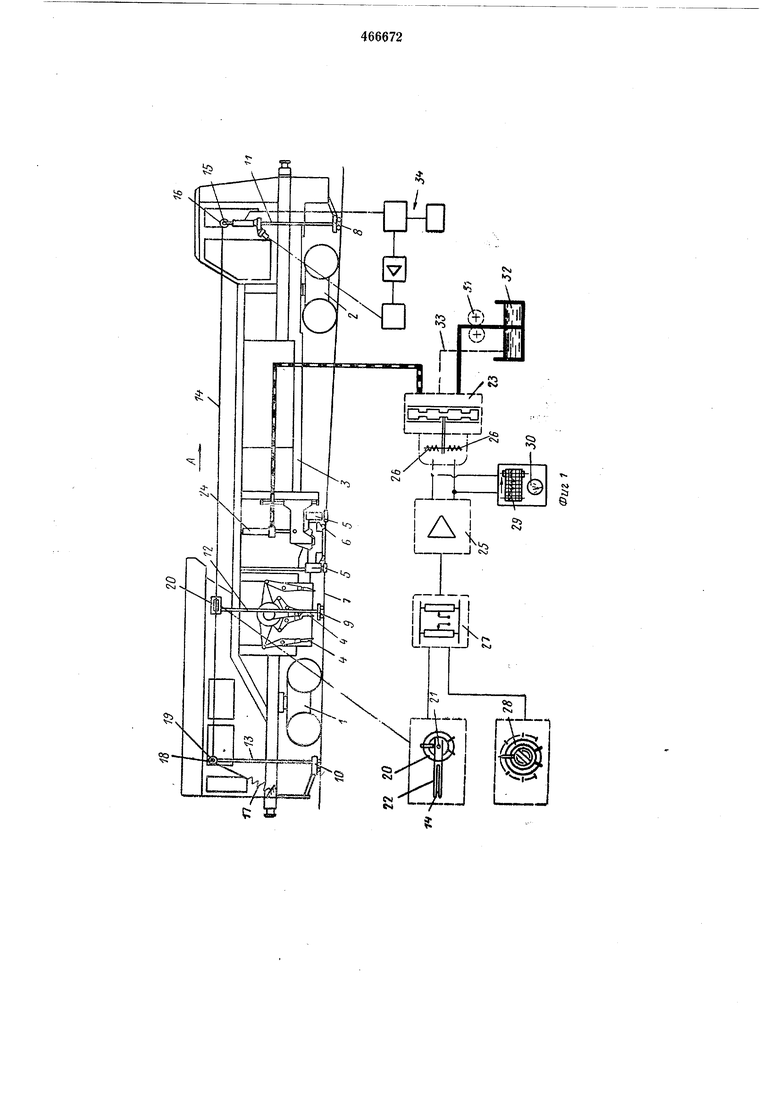
Передние конечные точки 15 нивелировочной системы отсчета, находящиеся на еще не выправленном отрезке пути, установлены с возможностью вертикального перемещения на измерительном ходовом механизме 8 или соответствующих несущих тягах 11.
На каждом верхнем конце несущих тяг 12, находящихся на среднем измерительном ходовом механизме 9, установлен электрический датчик в виде потенциометра 20 с поворотным движком, на оси вращения 21 которого укреплена вилка 22, охватывающая проволочную растяжку 14 с одной стороны, так что всякое изменение высоты пути 7 относительно проволочкой растяжки 14 приводит к изменению сопротивления потенциомера 20. Причем это изменение сопротивления пропорционально изменению напряжения, подаваемого для управления сервоклапаном 23. Последний в определенный момент нагружает привод поршеньцилиндра 24 подъемного приспособления 5. Потенциометр 20, определяющий фактическое положение пути 7, через усилитель 25 соединен с магнитными катушками 26 сервоклапана 23. Кроме того, между усилителем 25, сервоклапаном 23 и датчиком 20 предусмотрен блок 27 образования разности, второй выход которого соединен с задающим органом, который может быть выполнен в виде потенциометра 28 с поворотным движком для установления нулевой точки, т. е. заданного положения. После основной установки проволочной растяжки 14 по -передним конечным точкам 15 отсчета с помощью потенциометров 28 молсно компенсировать разность напряжения в блоке 27 образования разности, вызываемого возможной разницей уровня между проволочной растяжкой 14 и осью вращения 21 потенциометра 20, так что путеподъемные приспособления 5 останавливаются всегда в заданном положении. При известных условиях можно было бы с помощью потенциометра 28 с поворотным движком осуществлять и ручное управление сервоклапаном 23 и, следовательно, путеподъемным приспособлением.
Кроме того, между усилителем 25 и сервоклапаном 23 для каждого рельсового пути может быть подключено регистрирующее приспособление 29, а также индикаторный прибор 30 для визуального контроля процесса подъема. Индикаторный прибор 30 может одновременно служить для установки нулевой точки, т. е. потенциометр регулируется до тех пор, пока индикаторный прибор 30 не покажет значение «нуль.
Предлагаемая мащина содержит также гидронасос 31, запасной резервуар 32 и сливной трубопровод 33 гидросистемы.
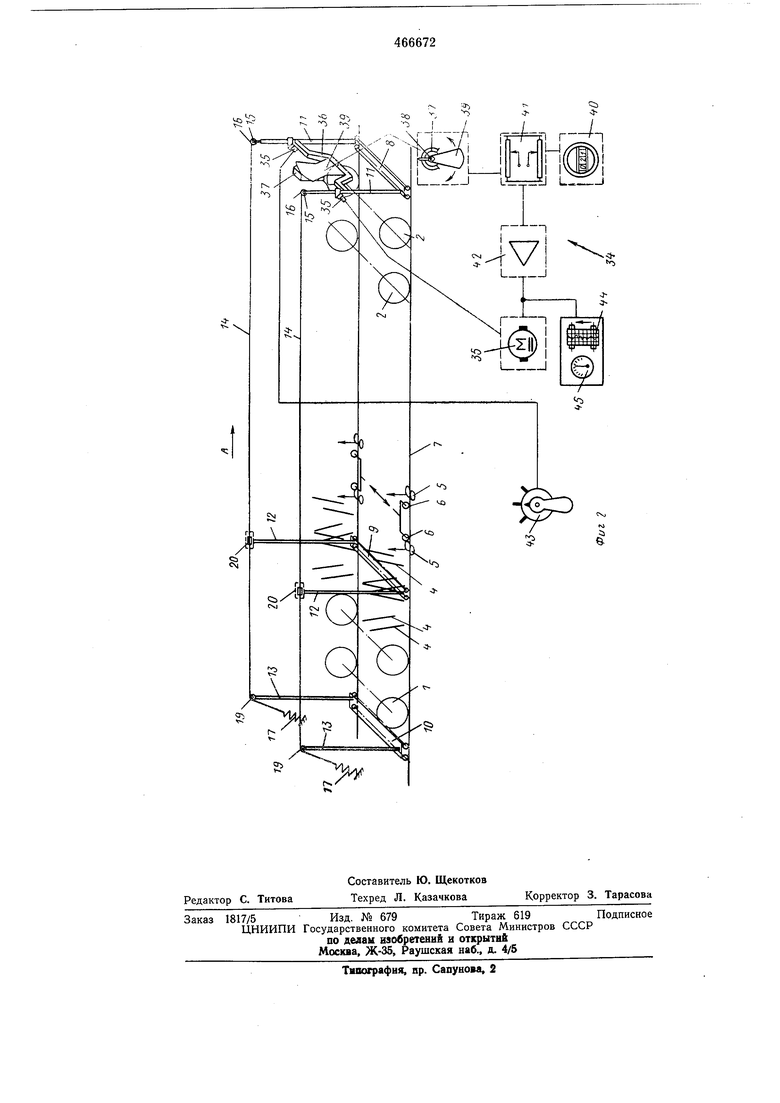
Над Каждой рельсовой нитью 7 расположена собственная проволочная растяжка 14, так что плоскость, проходящая через обе проволочные растяжки, представляет собой эталонную плоскость, параллельную заданному положению пути. Однако управление подъемным
10 приспособлением согласно изобретению может использоваться та.кже в нивелировочных системах, которые работают с единственной проволочной растяжкой, проходящей посередине пути. В этом случае можно не только контролировать и управлять каждой рельсовой нитью, но и определить поперечное положение пути или превыщение одной рельсовой нити над другой с помощью автоматически регулирующейся схемы 34. Для этого передние конечные точки 15 отсчета устанавливаются на несущих тягах 11 с возможностью вертикального перемещения. При этом движение перестановки осуществляется электродвигателями 35, червячными передачами и т. п. Для управле5 НИН этими электродвигателями на траверсе 36, проходящей между обеими несущими тягами 11, укреплен потенциометр 37 с поворотным движком, ось 38 вращения которого соединена с поперечным маятником 39. Потенциометр
0 37 с поворотным движком, определяющий фактическую величину превышения, а также механизм установки заданной величины, который также может быть выполнен в виде потенциометра 40 с поворотным движком, через
5 блок 41 и усилитель 42 подключены к электродвигателю, соответствующему рельсовой нити, выбранной в определенный момент в качестве следящей нити, или к его регулирующим органам. Работу другого электродвигателя соответствующего рельсовой нити, выбираемой в определенный момент в качестве исходной, можно регулировать ручным командоконтроллером 43. Для выбора рельсовой нити, являющейся исходной или следящей, предусмотрен
5 переключатель (на чертежах не изображен), с помощью .которого в зависимости от соответствующего направления кривой железнодорожного пути (превышение левого или правого рельса) можно коммутировать переключающую схему 34 с электродвигателя 35 одной рельсовой нити на электродвигатель 35 другой рельсовой нити, а при известных условиях - ручной комаидоконтроллер 43 с электродвигателя 35 одной нити на электродвигатель 35 другой нити. К блоку 41 образования разности может быть подсоединено регистрирующее приспособление 44 или индикаторный прибор 45, с помощью которых можно контролировать поперечное положение пути 7.
0 Мащина работает следующим образом.
Одна из двух рельсовых нитей выбирается в качестве исходной, а передняя конечная точка 15 отсчета соответствующей проволочной растяжки 14 с помощью командоконтроллера 5 43 приподнимается на высоту, соответствующую требуемому подъему пути. На потенциометре 40, снабженном цифровой индикацией, устанавливается соответствующее превышение, которое в случае прямолинейного отрезка пути равно нулю. Поскольку в блоке 41 образования разности устанавливается различие между предварительно выбранной величиной превышения или положением пути, определенными с помощью поперечного маятника 39 или соединенного с ним потенциометра 37, электродвигатель 35 включается в работу, и передняя конечная точка 15 отсчета, соответствующая следяшей рельсовой нити, автоматически поднимается на требуемую высоту. Величину разности можно визуально контролировать с помощью индикаторного прибора 45 или регистрирующего приспособления 44.
После установки передних конечных точек 15 отсчета обе проволочные растяжки 14 образуют эталонную плоскость, которая абсолютно параллельна заданному положению пути 7 и к которой должен быть подогнан путь в процессе выправки, что автоматически осуществляется во время выезда машины после установки потенциометра 28 на нулевой отметке с помощью путеподъемных приспособлений 5.
При этом гидравлический цилиндр 24 каждого подъемного приспособления можно нагружать в зависимости от углового положения потенциометра 20, управляющего сервоклапаном 23. Первоначально из-за неровности сервоклапан полностью открывается, при этом скорость подъема максимальна. При уменьшении неровности в месте измерения сервоклапан 23 постепенно перекрывает подачу гидравлнческой жидкости в подъемный цилиндр 24, и скорость подъема равномерно снижается, подъемное приспособление 5 останавливается и не может подняться выше заданного положения.
Предмет изобретения
Путерихтовочная и шпалоподбивочная машина, содержащая расположенные на раме
путеподъемник, шпалоподбивочные органы, установленные с возможностью вертикального перемещения, проволочную систему отсчета, проволочная база которой размещена внутри рамы так, что одна ее часть находится над
5 выпрямленным участком, а другая над участком, предназначенным для выправления, и, по крайней мере, одним из своих концов непосредственно прикреплена к раме, предпочтительно посредством натяжной пружины, устройство для автоматического регулирования подъемкой пути, включающее датчик положения пути, связанный с проволочной базой, а также с рельсовым путем через ролики и с устройством, управляющим приводом путе5подъемника, отличающаяся тем, что, с целью повыщения точности работы при высокой рабочей скорости машины, в устройстве для автоматического регулирования подъемкой пути использован электрический датчик,
преимущественно потенциометр, который установлен на штанге, соединенной с роликом, и снабжен вилкой, расположенной радиально относительно оси датчика и охватывающей проволоку базы отсчета, при этом датчик свя5
зан с устройством, управляющим приводом путеподъемника, через усилитель.
ip
fe В
5
| название | год | авторы | номер документа |
|---|---|---|---|
| ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2001 |
|
RU2195523C1 |
| Способ выправки железнодорожного пути и машина для его реализации | 1974 |
|
SU865137A3 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПРОДОЛЬНОМ ПРОФИЛЕ | 1991 |
|
RU2025548C1 |
| Устройство для непрерывной рихтовки рельсового пути | 1968 |
|
SU542476A3 |
| Устройство для подбивки шпал и выправки пути для путевой машины со смонтированной на ходовых тележках рамой | 1983 |
|
SU1279537A3 |
| Передвижная выправочно-подбивочная машина | 1983 |
|
SU1259963A3 |
| Шпалоподбивочная машина | 1974 |
|
SU728725A3 |
| Шпалоподбивочная машина | 1979 |
|
SU1105123A3 |
| Подвижная шпалоподбивочная нивелировочная и рихтовочная машина | 1983 |
|
SU1409135A3 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА С СОБСТВЕННОЙ РАМОЙ И РАМОЙ ДЛЯ АГРЕГАТОВ | 2003 |
|
RU2241088C1 |