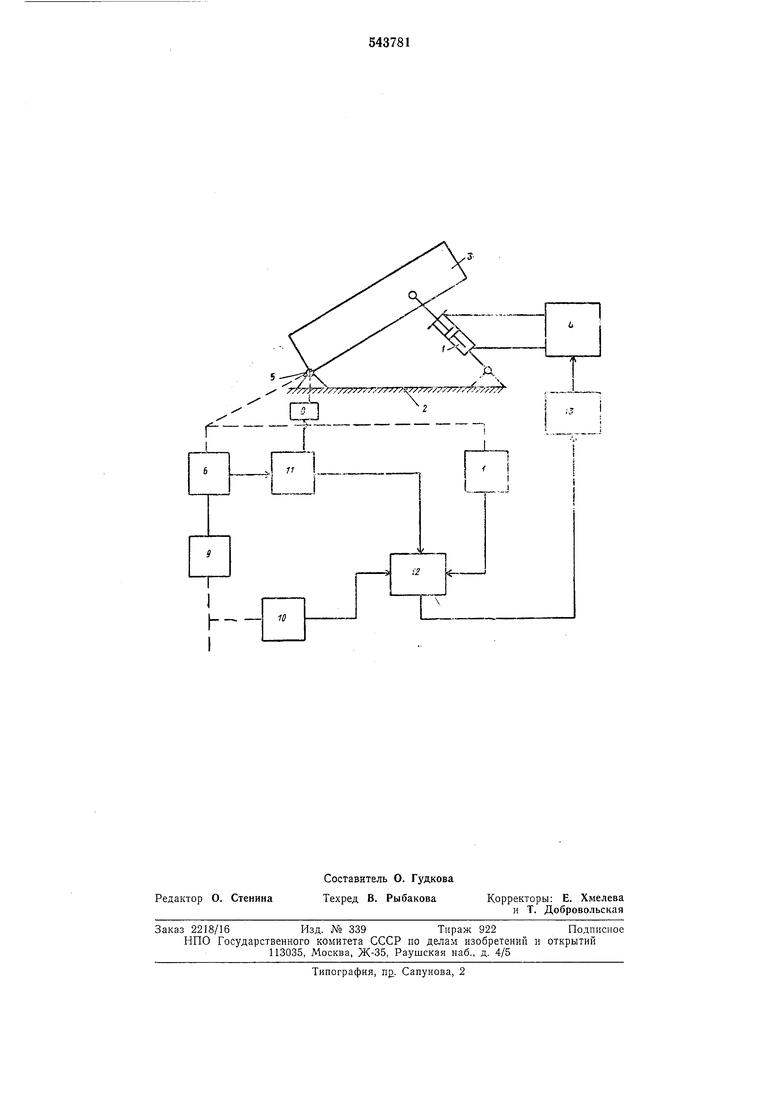
Электрогидравлический следящий привод состоит из гидроцилиндра 1, шарнирно-связанного с основанием 2 нагрузки 3 (башни) и имеющего гидравлическую связь с унравляющими гидронасосом 4. Нагрузка 3 вращается вокруг оси цапф 5 основания 2. С осью цапф механически связаны датчик угла поворота нагрузки 6 (балки), датчик скорости 7 и датчик угла поворота оси нагрузки 8 относительно основания 2. Датчик угла поворота 6 связан синхронной связью с задатчиком угла поворота нагрузки 9, который имеет механическую связь с задатчиком скорости нагрузки 10. Выход датчика угла поворота нагрузки 6 связан со входом корректирующего блока 11. Выход датчика скорости нагрузки 7 связан с первым входом сумматора 12. Выход задатчика скорости нагрузки 10 связан со вторым входом сумматора 12, третий вход которого подключен к выходу (Ко-рректирующего блока 11. Выход сумматора 12 связан со входом усилителя 13, а его выход - со входом управляющего гидронасоса 4.
При работе следящего привода коэффициент усиления силовой части привода в диапазоне рабочих углов изменяется в соответствии с изменением передаточного числа. Одновременно с этим основной управляющий сигнал (сигнал ошибки) с датчика угла поворота нагрузки 6, проходя через корректирующий блок 11, также изменяется по величине в соответствии с сигналом, поступающим от датчика 8 в зависимости от угла подъема балки 3, т. е. изменяется коэффициент передачи по основному сигналу. В результате общий коэффициент усиления системы во всем диапазоне рабочих углов сохраняется постоянным, что
позволяет улучшить устойчивость привода во всем диапазоне углов или, иначе говоря, сохранять ее на оптимальном уровне независимо от угла поворота оси нагрузки. Введение в привод функционального потенциометра с указанными связями позволяет повысить точность работы следящего привода и его устойчивость во всем диапазоне рабочих углов поворота балки.
Формула изобретения
Электрогидравлический следящий привод, содержащий шарнирно-связанный с основанием нагрузки гидроцилиндр, полости которого подключены к управляющему гидронасосу, соединенному своим входом с выходами усилителя, вход которого подключен к выходу сумматора, первый вход сумматора подключен к выходу датчика скорости
нагрузки, второй вход сумматора соединен с датчиком угла поворота нагрузки через последовательно связанные датчики скорости и угла поворота нагрузки, отличающийся тем, что, с целью повышения точности привода, в нем установлены датчик угла поворота оси нагрузки относительно основания и корректирующий блок, первый и второй входы которого соединены соответственно с выходами датчиков угла поворота оси нагрузки относительно основания и датчика угла поворота нагрузки, а выход подключен к третьему входу сумматора.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 407275.
2. Техническое описание ПБ1, 342.010 электрогидравлического привода 9В64 (прототип).
5
7 7Т77 /// У 7УУ / // 7У7 7 77/ //7/
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1976 |
|
SU632832A2 |
| Следящий привод | 1977 |
|
SU857924A1 |
| Электрогидравлический следящий привод | 1988 |
|
SU1557370A1 |
| СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2473822C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА | 2009 |
|
RU2472978C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| Система управления электрогидравлическим приводом | 1976 |
|
SU643831A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ПРОТЕЗОВ БЕДРА НА ЭКСПЛУАТАЦИОННУЮ ПРОЧНОСТЬ | 1992 |
|
RU2039537C1 |