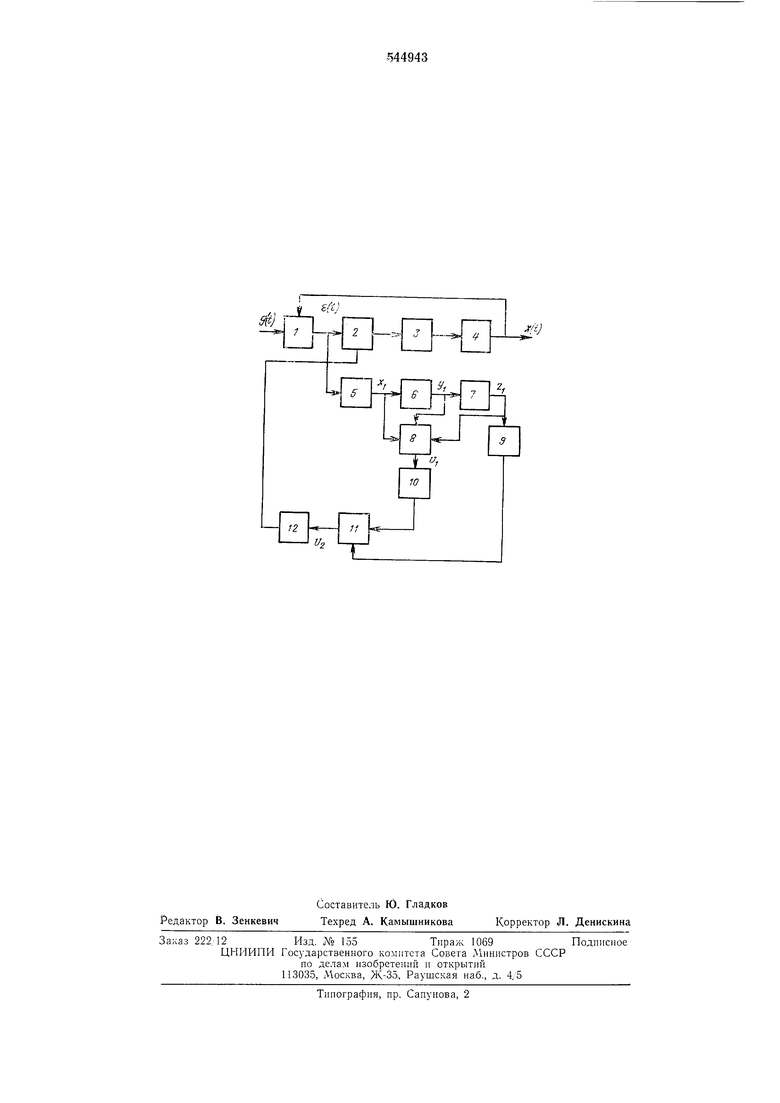
тры, дифференциатор 8, первый 9 и второй 10 выпрямители, блок 11 деления, нелинейный блок 12; Е (t) - сигнал рассогласования, i(p)-сигнал с выхода усилителя, yi(p) - сигнал с выхода первого фильтра, zi(p) -сигнал с выхода второго фильтра, Ui - напряжение на выходе дифференциатора, L/z - напряжение на выходе блока деления.
Работает самонастраивающаяся система регзлирования следующим образом.
С сумматора 1 сигнал рассогласования s (t) через блок 2 умножения и исполнительный механизм 3 воздействует на объект 4 регулирования. Одновременно сигнал с сумматора 1 через усилитель 5 подается на последовательно соединенные фильтры 6 и 7. С фильтра 6 сигнал поступает на дифференциатор 8, куда одновременно подаются сигналы с блоков 5 и 7. Фильтры 6 и 7 имеют соответственио передаточные функции
11
W, -
1 +
i + Ttp
Сигнал па выходе фильтра 6 yi(p) связан с сигналом на выходе фильтра 7 Zi(p) зависимостью y.(p) (l-{-Tzp) Zi(p), а сигнал на входе фильтра 6 с сигналом на выходе фильтра 7 зависимостью Xi(p) ()p-{- -TiT2p Zi(p). Сигнал XI(P) с коэффициентом передачи, равным единице, сигнал yi(p) с коэффициентом передачи, равным , сигнал Zi(p} с коэффициентом передачи, равным TiTz подается на входы дифференциатора 8. В результате на его выходе формируется сигиал
,(р)Х,(р)- (р) +
2
+ Лр)т..(р}
2
иропорциональный второй производной выходного сигнала фильтра 7. Таким образом получены два сигнала с фазами, отличающимися друг от друга на 180° при всех частотах сигнала рассогласования s,(t). С выходов блоков 7 и 8 сигналы через двухтактные выпрямители 9 и 10 поступают на входы блока 11 деления, на выходе которого образуется сигнал, обратно пропорциональный квадрату частоты, так как при 21 Узз1пш на выходе фильтра 7, на выходе дифференциатора будет
U,(t) - - Г7г з8шшг;
В результате деления сигнала ifH на сигА тг
нал Ui(t) иолучается Uz(t) , где kn -
0)2
коэффициеит передачи блока деления. Очевидно, что Uz(t), а следовательно, и коэффициент передачи блока 2 перемножения определяется только частотой воздействия со и не зависит от его фазы. Для обеспечения требуемой частотой характеристики устройства
между блоком 11 деления и блоком умножения включен нелинейный блок 12.
В результате применения в предлагаемой самонастраивающейся системе регулирования двух выпрямителей и перечисленных связей между функциональными блоками блок умножения при всех частотах обеспечивает пеискаженную передачу сигнала рассогласования, что позволяет исключить в коптуре управления фильтры низких частот, расширить полосу пропускания и иовысить быстродействие. При этом нет необходимости поддерживать в коитуре управления незатухающие колебания.
Формула изобретения
Самонастраивающаяся система регулирования, содержащая последовательно соедипенпые сумматор, блок умножения, исполнительный механизм, выход которого соединен с входом объекта регулирования, выход которого соединен с одним из входов сумматора,
усилитель, иервый и второй фильтры, диффереициатор, блок деления, нелинейный блок, отличающаяся тем, что, с целью повышения быстродействия и расширения полосы пропускания самонастраивающейся системы,
в ней установлены иервый и второй выирямители, иричем вход усилителя соедипеи с выходом сумматора, а выход - с первым входом дифференциатора и входом первого фильтра, выход которого соединен с вторым входом дифференциатора и входом второго фильтра, выход которого соединен с третьи.м вхоД01М дифференциатора и через первый выпрямитель с иервым входом блока деления, второй вход которого через второй выпрямитель
соединен с выходом дифференциатора, а выход через нелииейный блок соединен с вторы.м входо.м блока умножения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1972 |
|
SU430351A1 |
| ПОМЕХОУСТОЙЧИВЫЙ САМОНАСТРАИВАЮЩИЙСЯ ИЗМЕРИТЕЛЬ ТЕМПЕРАТУРЫ ГАЗА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2601712C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1996 |
|
RU2112925C1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |