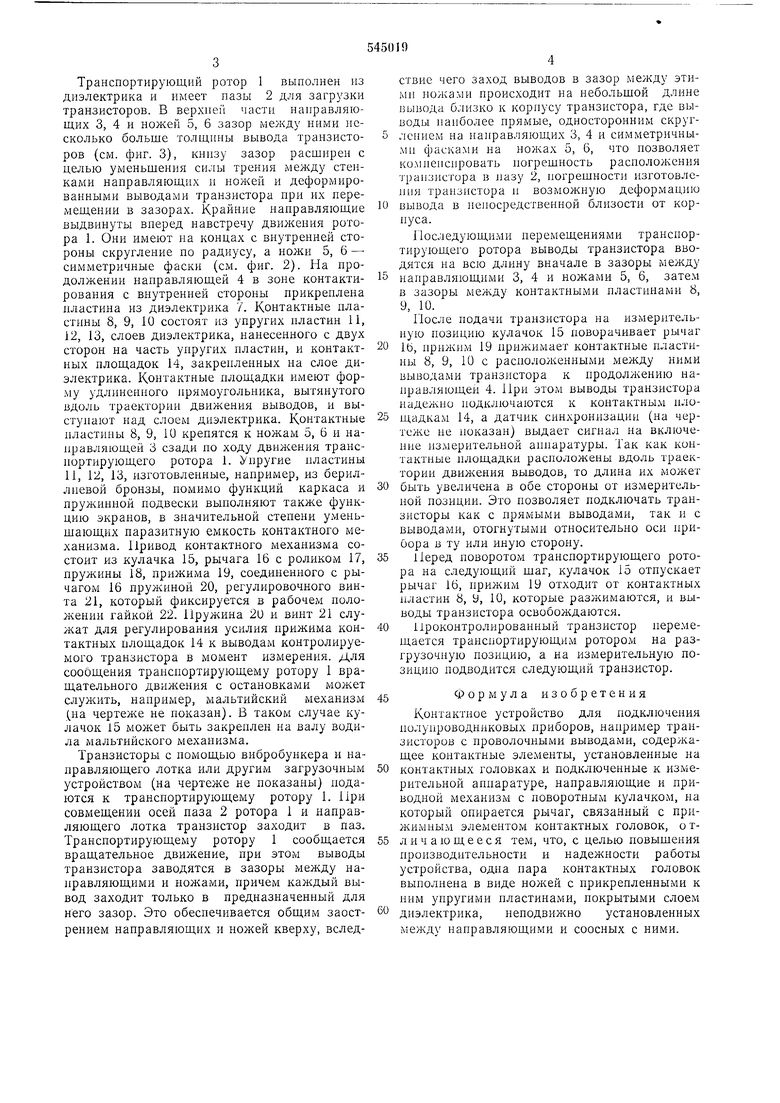
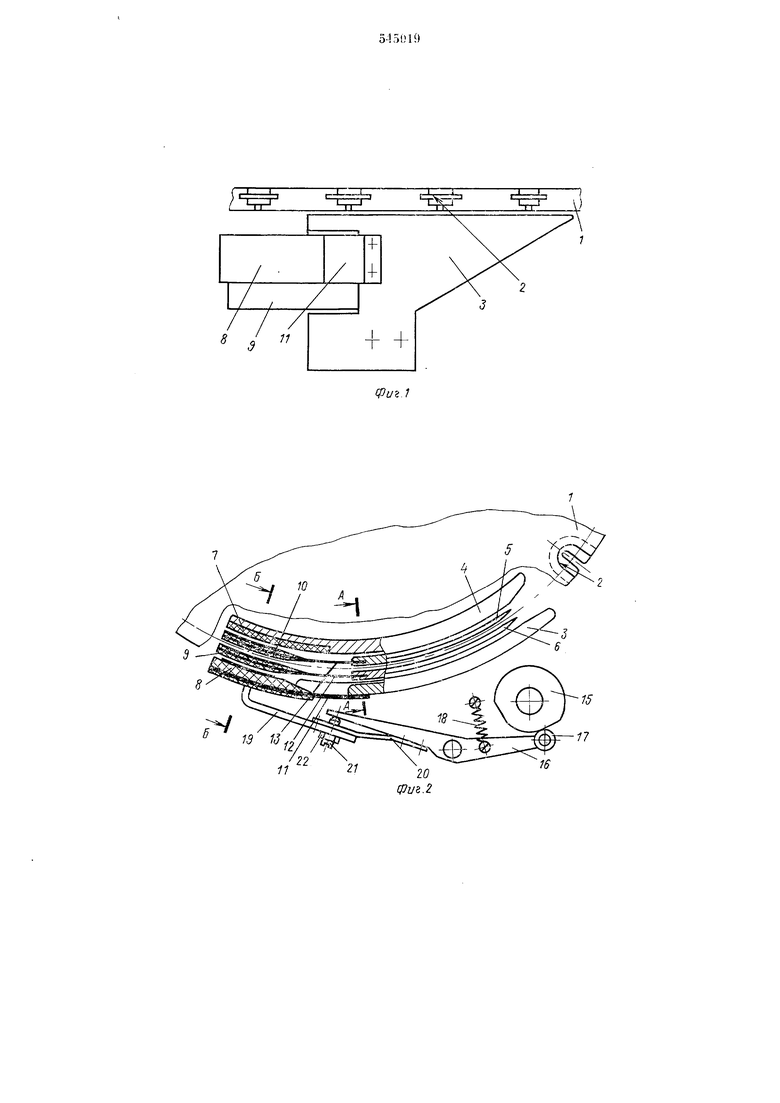
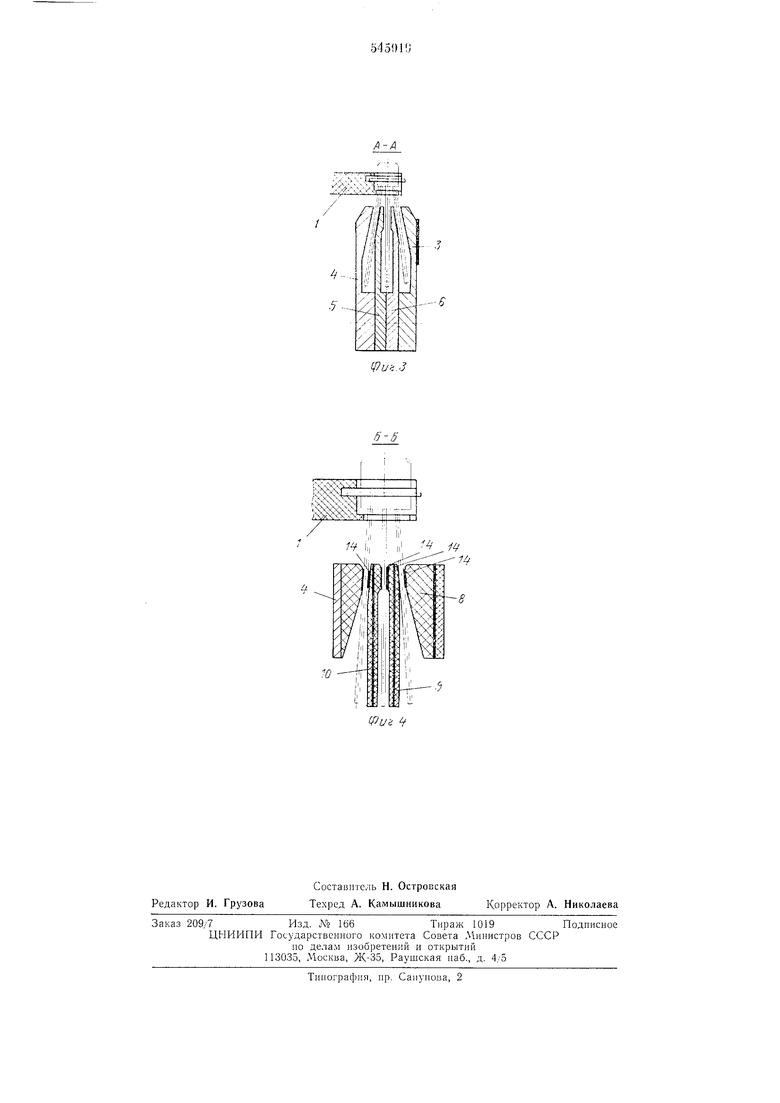
Транспортирующий ротор 1 выполнен из диэлектрика и имеет пазы 2 для загрузки транзисторов. В верхпей части направляющих 3, 4 и ножей 5, 6 зазор между ними песколько больще толщины вывода транзисторов (см. фиг. 3), книзу зазор расширен с целью уменьшения силы трения между стенками направляющих и иожей и деформированными выводами транзистора при их перемещении в зазорах. Крайние направляющие выдвинуты вперед навстречу движения ротора 1. Они имеют на концах с внутренней стороны скругление по радиусу, а ножи 5, 6 - симметричные фаски (см. фиг. 2). На продолжении направляющей 4 в зоне контактирования с внутренней стороны прикреплена пластина из диэлектрика 7. Контактные пластины 8, 9, 10 состоят из упругих пластин 11, 12, 13, слоев диэлектрика, нанесенного с двух сторон на часть упругих пластин, и контактных площадок 14, закрепленных на слое диэлектрика. Контактные площадки имеют форму удлиненного прямоугольника, вытянутого вдоль траектории движения выводов, и выстунают над слоем диэлектрика. Контактные нластины 8, 9, 10 крепятся к ножам 5, 6 и направляющей 3 сзади по ходу двилсения транспортирующего ротора 1. Упругие пластины И, 12, 13, изготовленные, например, из бериллиевой бронзы, помимо функций каркаса и пружинной подвески выполняют также функцию экранов, в значительной степени уменьшающих паразитную емкость контактного механизма. Привод контактного механизма состоит из кулачка 15, рычага 16 с роликом 17, пружины 18, прижима 19, соединенного с рычагом 16 пружиной 20, регулировочного винта 21, который фиксируется в рабочем положении гайкой 22. Пружина 2U и винт 21 служат для регулирования усилия прижима контактных площадок 14 к выводам контролируемого транзистора в момент измерения. Для сообщения транспортирующему ротору 1 вращательного движения с остановками может служить, например, мальтийский механизм (на чертеже не показан). В таком случае кулачок 15 может быть закреплен на валу водила мальтийского механизма.
Транзисторы с помощью вибробункера и направляющего лотка или другим загрузочным устройством (на чертеже не показаны) подаются к транспортирующему ротору 1. При совмещении осей паза 2 ротора 1 и направляющего лотка транзистор заходит в паз. Транспортирующему ротору 1 сообщается вращательное движение, при этом выводы транзистора заводятся в зазоры между направляющими и пожами, причем каждый вывод заходит только в предназначенный для него зазор. Это обеспечивается общим заострением направляющих п ножей кверху, вследствие чего заход выводов в зазор между этими ножами происходит на небольшой длине вывода близко к корпусу транзистора, где выводы наиболее прямые, односторонним скруг5 лением на направляющих 3, 4 п симметричными фасками на ножах 5, 6, что позволяет ко.миепсировать погрешность расноложения раизистора в пазу 2, погрешности изготовления транзистора и возможную деформацию
0 вывода в непосредственной близости от кориуса.
Последующими перемещениями транспортирующего ротора выводы транзистора вводятся на всю длину вначале в зазоры между
5 направляющими 3, 4 и ножами 5, 6, затем в зазоры между контактными пластинами 8, 9, 10.
После подачи транзистора на измерительную позицию кулачок 15 поворачивает рычаг
0 Ш, прижим 19 прижимает контактные пластины 8, 9, 10 с расноложенными между ними выводами транзистора к продолжению наиравляющеи 4. При этом выводы транзистора надежно подключаются к контактным площадкам 14, а датчик синхронизации (на чертеже не показан) выдает сигнал на включение измерительной аппаратуры. Так как контактные площадки расположены вдоль траектории двилсения выводов, то длина их может
0 быть увеличена в обе стороны от измерительной позиции. Это позволяет подключать транзисторы как с прямыми выводами, так и с выводами, отогнутыми относительно оси ирибора в ту или иную сторону.
5 Перед поворотом транспортирующего ротора на следующий щаг, кулачок 15 отпускает рычаг 16, прижил 19 отходит от контактных пластин 8, 9, 10, которые разжимаются, и выводы транзистора освобождаются.
0 Проконтролированный транзистор перемещается транспортирующим ротором на разгрузочную позицию, а на измерительную позицию подводится следующий транзистор.
5Формула изобретения
Контактное устройство для подключения иолупроводниковых приборов, нанример транзисторов с проволочными выводами, содержащее контактные элементы, установленные на
0 контактных головках и подключенные к измерительной аппаратуре, направляющие и приводной механизм с поворотным кулачком, на который опирается рычаг, связанный с прижимным элементом контактных головок, о тличающееся тем, что, с целью повыщения нропзводптельности и надежности работы устройства, одна пара контактных головок выполнена в виде ножей с прикрепленными к ним упругими пластинами, покрытыми слоем
диэлектрика, неподвижно установленных направляющими и соосных с ними.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для классификации полупроводниковых приборов | 1973 |
|
SU534810A1 |
| Автоматический классификатор транзисторов | 1975 |
|
SU557436A1 |
| Устройство для контроля и сортировки полупроводниковых приборов с гибкими выводами | 1976 |
|
SU752838A1 |
| Устройство для автоматической разбраковки радиодеталей с гибкими выводами | 1980 |
|
SU894822A1 |
| Устройство для разбраковки радиодеталей с гибкими выводами | 1980 |
|
SU930427A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ СЛЮДЯНЫХ КОНДЕНСАТОРОВ | 1970 |
|
SU266957A1 |
| Автомат для разбраковки полупроводниковых приборов | 1975 |
|
SU561234A1 |
| Контактное устройство | 1981 |
|
SU1045290A1 |
| Устройство для групповой сборки и пайки | 1987 |
|
SU1433666A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ И ПРИПАЙКИ ВЫВОДОВ К СЕКЦИЯМ КОНДЕНСАТОРОВ | 1970 |
|
SU259279A1 |
15
17
16
