1
Изобрэте111 е отиэсится к области nonj- провогднцковс о машиностроения и может быт ис1юльзсьзио 3 электронной промышленности иои контроле параметров полупроводниковых приборов, например транзисторов.
Известное устройство для подключения транзисторов к и;з1 1ерительны:лириборам| 1 j соаержит опорный стержен.. с продольным пазом, в котором закреплоьа одна пара контактных головок в ви.ие (J -образной нанравЛ7;ющей, азготовленпой из ynpyroiO ма1-ериа да, покрытой слоем диэлектрика и имеющей в нижней части контактные площадки. Другая пара контактных головок соединена с подвижными упорами и приводным механизMOM. Устройст-во не позволяет надежно подключить выводы прибора к из tepитeльнoй аппаратуре. Кромо того устройство позво-тяет подключать только те приборы, которые имеют не более трех выводов fl ,
Наиболее близким к предложенному техническим решениеь( является автоматический классификатор транзисторов 2J , содержащий загрузочное, логическое, сортирующее устройства, транспортно-подключающее устpOHC:i;jo с ,- T-i-.Ui. ;i -.vpi г роБ. Узел T; i ic;ii:;i:T pc; f; i-Lvi HO,nynpOBoa;tiiKjBiii:- ггрнборо: к ному блоку данного класск( нен в виде турели с рычагамя, которых имеет независимую подвеску, позволяющую совершать перемещение Е вертикально плоскости. Ка концах рычагоз закреплены головки с отверстиями, в которые на загрузочной позиции вст-авляются транзисторы. Контакты измерительногс блока неподвижно закреплены в горизонтальном плоскости на,а турелью. Выводы транзистор после загрузки приобретают стрЧо ориентированное по/ожение. На нзмерята.пьной позидии рычаг турели перемещается в вэртккальной плоскости, после чег о въ-ц.оды пркбора прижимаются к контакт i-:t,i:. элементам измерительного блока.
Однако механизмы автоматической за.грузки приборов с длинными гибкими выводами сложны по конструкции, имеют больщой ход (С1томе1шмый с длиной ь;ыьоца,) и ограниченную скорость не;эмеи.онип во избежание изгиба выводов. На нрйдьщу.щнх
техюлогических операциях выводы сольшннства приборов деформируются, принимая пря этом произвольную форму. Перед ;3а- грузкой приборов его выводы рихтуются сггециальным механизмом, но после рихтовкй lie всегда могут быть вставлены в отвэрстня головки.
Эти недостатки значительно снижают производительность и надежность работы классификатора,
Целью изобретения является повышение производительности и надежности работы классификатора.
Эта цель достигается тем, что устройство подключения содержит два разводящих ножа, один из которых неподвижно закреплен вдоль пути перемещения транзисторов и имеет поперечный паз для входа подвижного разводящего ножа, а парные контакты выполнены в виде неподвижных, расположен на продолжении неподвижного ножа, и подвижных подпружиненных контактных площадок.
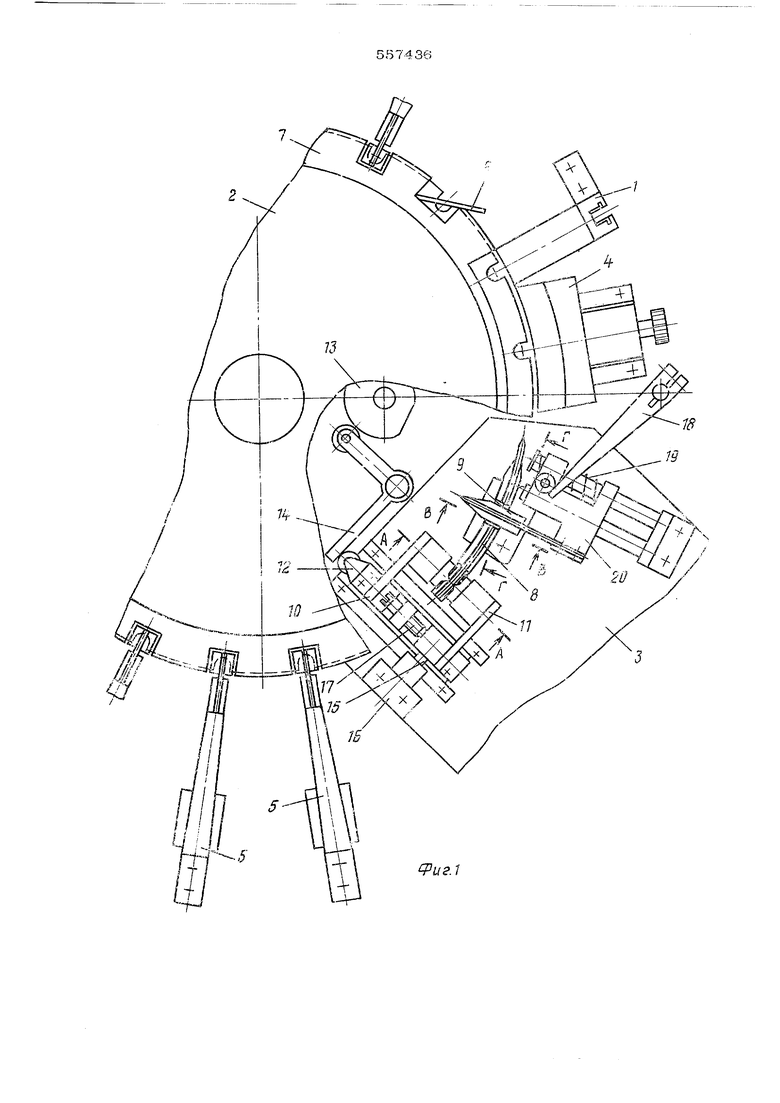
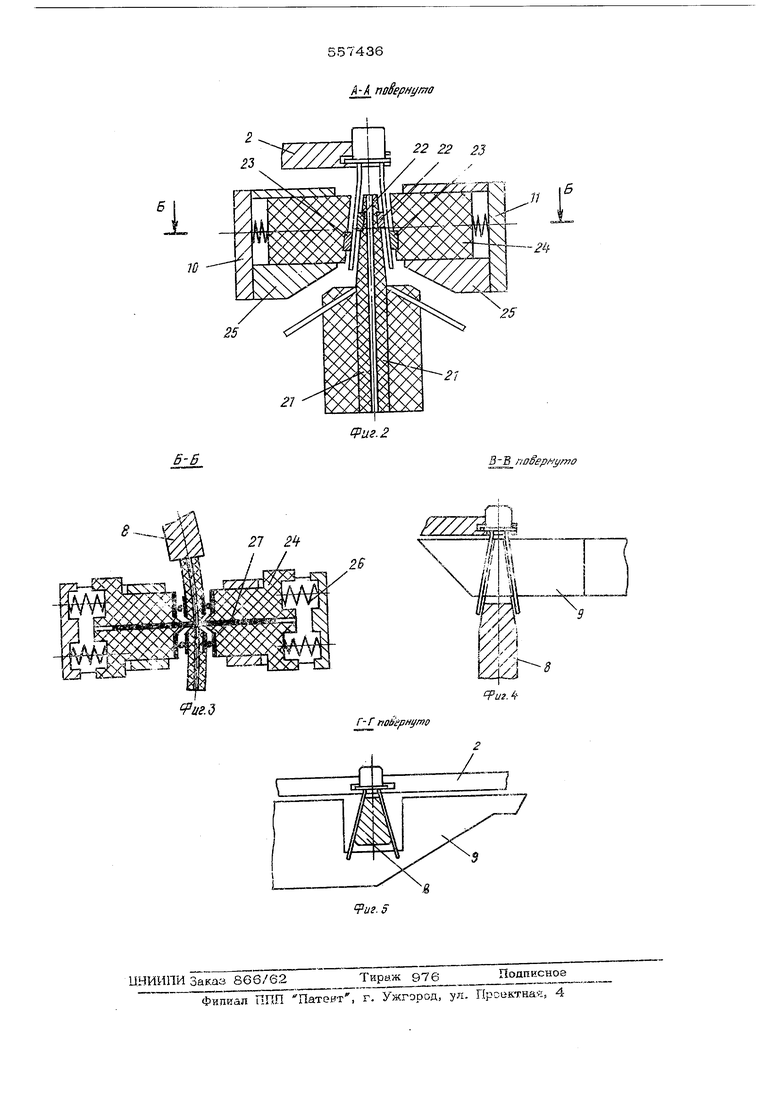
На фиг. 1 схематически показан предложенный автоматический классификатор тран зксторов; на фиг. 2 - сечение по А-А на фкг. 1; на фиг. 3 - сечение по Б-Б на фкг. 2; на фиг. 4 - сечение по В-В на фиг. на фиг. 5 - сечение по Г-Г на фиг. 1.
Автоматический классификатор транзис торов состоит из заг рузочного устройства, содержащего вибробункер (не показан) и питатель 1 транспортно-подключающего устройства, содержащего транспортирующий ротор 2 и устройство подключения 3 механизма ориентации 4 j измерителя параметров 5, логического устройства. На последней позиции для выгрузки неразбракованных транзисторов неподвижно закреплена пластина 6.
Транспортирующий ротор 2, выполненный в виде диска с гнездами по периферии для загрузки транзисторов, получает прерывистое вращение, например, от мальтийского механизма. Он окружен неподвижно закреплекпой обоймой 7 для удержания транзисторов в гнездах ротора 2 при его вращении. Устройство подключения 3 транзисторов к измерителю параметров содержит разводящие ножи 8, 9 трапецеидального поперечного сзчения и прижимы 10,11, один из которых (1C) закреплен на каретке 12, соверщающей прямолинейное перемещение от кулачка 13 через рычаг 14, Другой прижим 11 установлен на оси 15, захреплен™ ной на стойке 16, и поворачивается вокруг оси упором 17, смонткрованным на каретке 12.
Нож 8, расположенный поа ротором 2, неподвижно закреплен едоль пути тр 1нспортируемого транзистора и иллвет поперечный паз для входа второго 9-, который закреплен на совершающем с помощью рычага 18 и пружины 19 возвратно-поступательные перемещения ползуне 20. В задней утонченной части ножа В на диэлектрических подкладках 21 закреплены неподвижные контактные плодидки 22 контактных групп, подвижные контактные площадки 23 которых закреплены на вкладыщах 24 из диэлектрического материала.
Вкладыши 24 имеют выступы, заострённые со стороны соседних контактных площадок, что исключает возможность замыкания двух выводов между собой в момент подключения. Вкладыши установлены в корпусах 25, закрепленных на прижимах 10, 11, и подпру инены цилиндрическими пружинами 26, чем обеспечивается необходим усилие прижима на каждом из выводов и компенсации неточности расположения вывода относительно контактных площадок. Между вкладышами располагают пластины 27, являющиеся экранами.
Автоматический классификатор транзисторов работает следующим образом.
Из вибробункера транзисторы поступают в питатель 1, откуда под действием силы тяжести и напора струи сжатого воздуха загружаются в гнезда транспортирующего ротора 2, совершающего прерывистое вращение. Используя перемещение транспортирующего ротора на шаг, механизм ориентации 4 производит ориентацию транзистора. При последующем движении транзисторов, находящегося в гнезде ротора, выводы его находят на неподвижный нож 8 устройства подключения 3 и разводятся за счет трапецеидального поперечного сечения ножа. Как только транзистор приходит на следующую позицию, подвижный нож 9, получая перемещение посредством рычага 18, разводит выводы в перпендикулярной направлению движения ротора плоскости. На следующей позиции прижимы 10, 11, перемещаемые посредством рычага 14, зажимают каждый вывод между подвижными 23 и неподвижными 22 контактными площаками, подключая тем самым транзистор к измерителю параметров 5. При последующих поворотах ротора 2 транзистор последовательно проходит через все позиции выгрузки, на одной из которых сбрасывается в приемную емкость по команде от логического устройства. Неразбракованные транзисторы из-за отсутствия контакткро- вакия разт-ружаются пластиной 6.
Формула изобретения
Автоматический классификатор транзисторов, содержащий загрузочное, логическое, сортирующее устройства, транспортно-подклю-5 чающее устройство с контактами, измеритель параметров, отлич ающийся тем, что, с целью повышения производительности и надежности работы, устройство подключения содержит два разводящих ножа, ю один из которых неподвижно закреплен вдоль пути перемещения транзисторов и имеет поперечный паз для входа подвижного разводящего ножа, а парные контакты выполнены
в Виде неподвижнык, расположенных на продолжений неподвижного ножа, и подвижных подпружиненных контактных площадок.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 328651, кл. Н 01 Н 1/ОО, 1970 г,
2.Ю. П. Рогов и др. Некоторые особенности конструирования мкогопозиционных механических систем контрольно-классификационных комплексов , Электронная техника, серия 12, 1970, вып. 2, с. 94108 ,
иг.-l
10
25
21
6-Б
j noSepHi/ffto
5.В noSephymo
В
иг.д
. 4

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и сортировки полупроводниковых приборов с гибкими выводами | 1976 |
|
SU752838A1 |
| Устройство для автоматической разбраковки радиодеталей с гибкими выводами | 1980 |
|
SU894822A1 |
| Автомат для разбраковки полупроводниковых приборов | 1975 |
|
SU561234A1 |
| Контактное устройство для подключения полупроводниковых приборов | 1972 |
|
SU545019A1 |
| Автомат для классификации полупроводниковых приборов | 1973 |
|
SU534810A1 |
| О П^ГСГА РПИ Е ИЗОБРЕТЕНИЯ | 1973 |
|
SU389578A1 |
| КЛАССИФИКАТОР ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1971 |
|
SU296180A1 |
| Классификатор полупроводниковых приборов | 1976 |
|
SU995160A1 |
| Устройство для контроля и испытания полупроводниковых приборов | 1980 |
|
SU930787A1 |
| Классификатор полупроводниковых приборов | 1972 |
|
SU470020A1 |