Rsnepa нескольких позиций загрузки и разгруЗКи платформы упоры выполняются выД:ЗИЖНЫМИ.
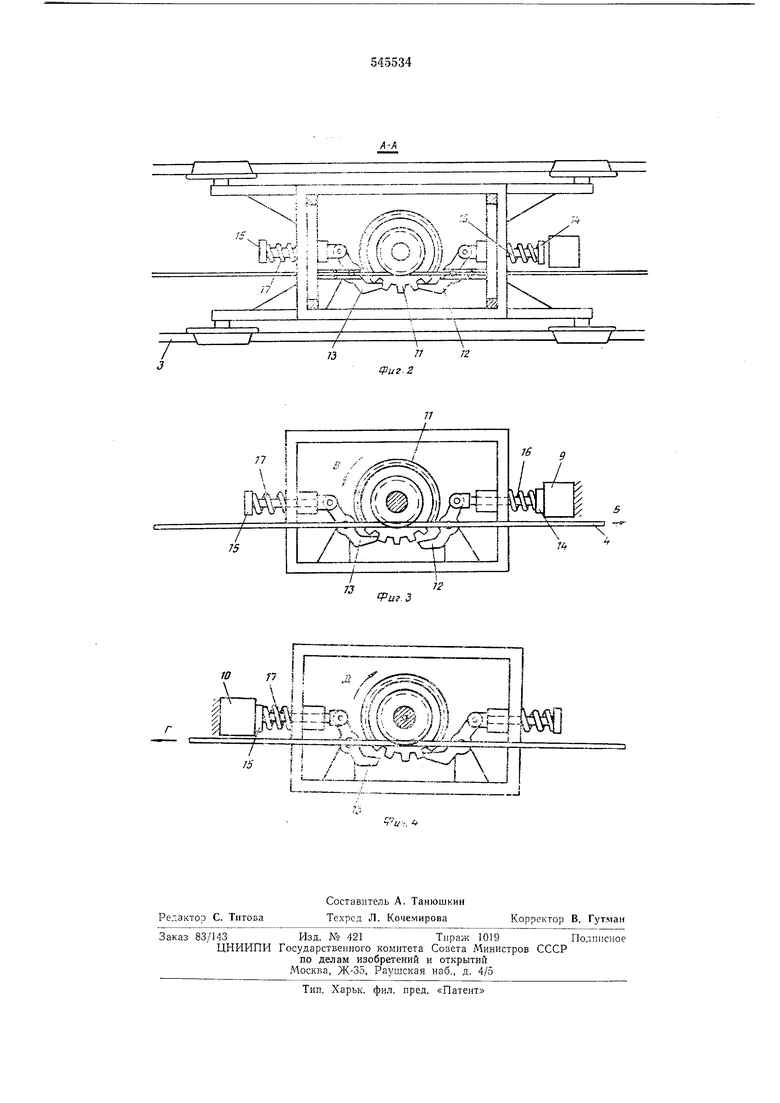
Внутр,и рамы тележки / (см. фиг. 2) разMettieH храловой механизм, состоящий из жестко лрикреллениого к бараба,иу-гайке храповика 111, взаимодействующего с противоположно направленны.ми собач. 12 и 13. СобаЧКи выполнены .в виде двуплечего рычага и средней точ-кой шарнирио лрихреплены к раме тележки, а одним из концов - к проущина.м стержней-толкателей 14 -и 15, монтированных с 1возможлостью /перемещения вдоль оси тележ1ки. Тол.катели снабжены пружинами 16 И 17, удерживающими ,их в выдвинутом наружу положении.
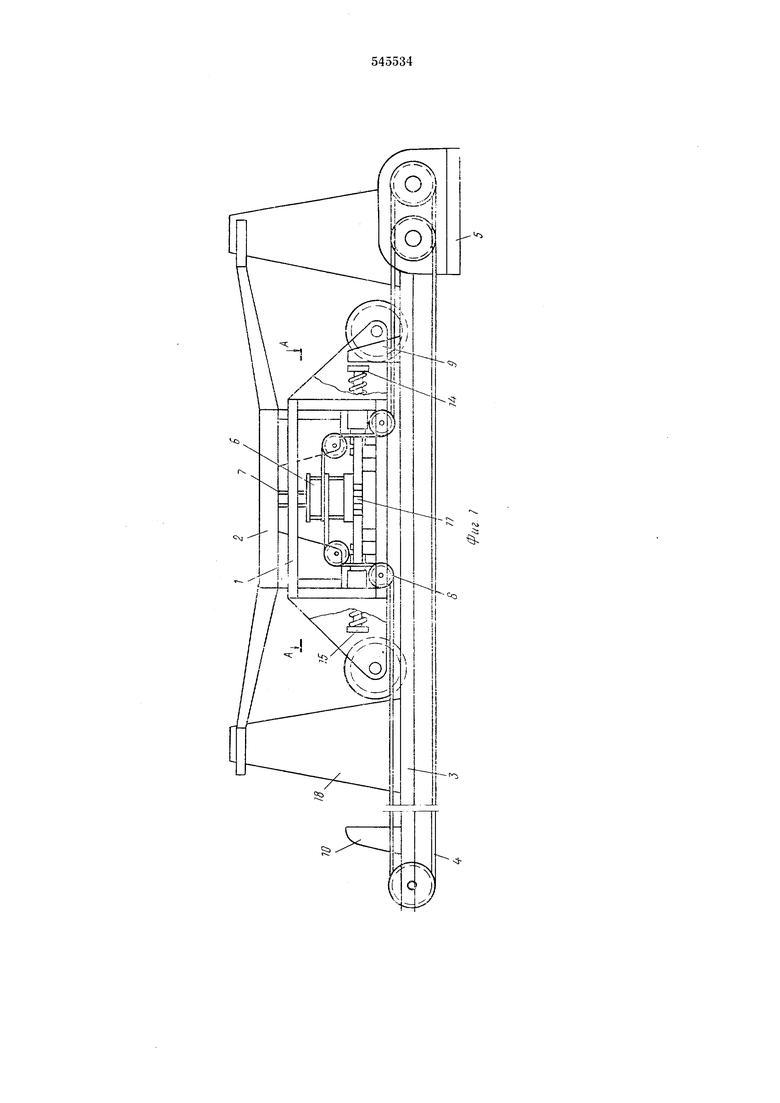
В местах установки изделий, лодлежащих перемещению, размещены неподвижные опоры 18. Высота их подобрана такой, что в нпжием иоложении нлатформы 2 ее консоли находятся ниже олор.
Устройство работает следующим образом.
Подлежащее перемещению изделие (напрнмер вагон) устанавливается на ппоры 18, лосле чего включается привод 5, ,и посред ством каната 4 тележка / перемещается лод изделие. Поскольку пружины 16 и 17 see время отжл- мают толкатели 14 и 15 наружу, собач1ки 12 и 13 в .момент перемещепия тележки остаются прижатььми к храповику //, стопорч барабан-гайку 6.
На позиции погрузки изделия толкатель 14 взаимодействует с упором 9. Поскольку тележка продолжает перемещаться ло направлению стрелки Б (см. фиг. 3), пружина 16 сжимается, а толкатель 14 утапливается, благодаря чему собачка 12, проворачиваясь против часовой стрелки, отходит от храповика //.
Так 1как лебедка продолжает работать, натяжение каната 4 возрастает, и бараба.нгаика проворачивается по направлению стрелки В, взаимодействуя с винтом 7 и поднимая платформу 2. При лодъеме платформы иоследняя соприкасается с изделиел и подпирлает его, .снимая с опор 18.
Затем привод 5 реверсируется, в результате чего лравая ветвь каната ослабляется, а левая натягивается. При этом пружина /6 разжимается, прижимая собачку 12 к храпови-ку, и тележка с изделием перемещается иа новую нозицию.
При взаимодействии толкателя 15 с упором 10, установленным -иа лозиции разгрузки изделия, лружина 17, благодаря тому, что тележ ка лродолжает двигаться по направлению стрелки Г, сжимается (см. фиг. 4), а собачка отходит от храповика. При дальнейщем натяжении каната барабан-гайка вращается по направлению стрелки Д, и платформа опускается, вследствие чего изделие оказывается стоящим на опорах 18.
Формула изобретен и я
Устройство для перемещения изделий по авт. св. Ло 407803, о т л и ч а ю ui, е е с я тем, что, с целью ловыщення эксплуатационной надежности, устройство снабжено храповым механизмом с двумя лротивоположно налравлеиными соба4|ка1ми, храповик а оторого установлен на барабане-гайке, а собачки по обе стороны от барабана-гайки - на тележке, снабженной толкателями, взаимодействующими с улора.ми на трассе конвейера и с собачками.
Р1сточники информации, нринятые во внимание при экспертизе изобретения:
1.Авторское свидетельство СССР № 309501, :кл. В 65 G 25/04, 1969.
2.Авторское свидетельство СССР М 407803, кл. В 65 G 25/04, 1971.
10
fiif.S
