ka тока якоря, а выходом - с одним из входов блока памяти, другой вход которого подключен к выходу блока компенсации изменения веса канатов, а выход соединен с другими входами другого блока сравнения, выход которого соединен со входом исполнительного механизма.
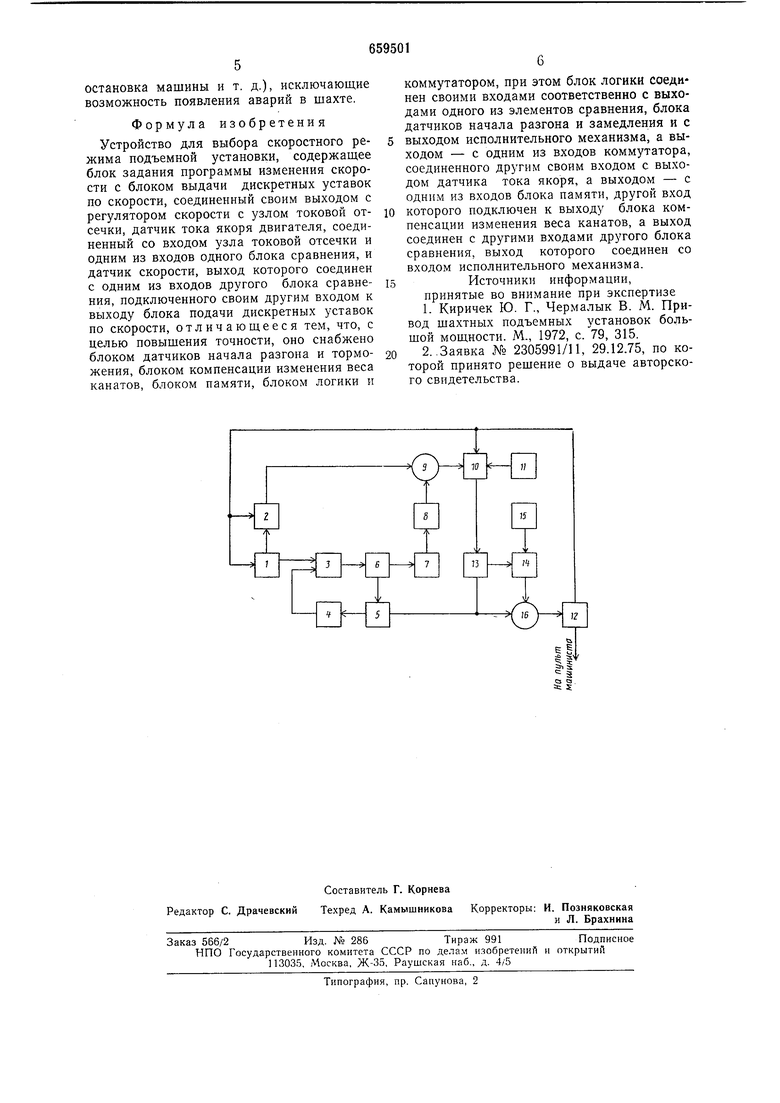
На чертеже представлена функциональная схема устройства для выбора скоростного режима подъемной установки.
Устройство содержит блок I задания программы изменения скорости с блоком 2 выдачи дискретных уставок по скорости. Блок 1 своим выходом подключен к регулятору 3 скорости с узлом 4 токовой отсечки, к входу которого подключен датчик 5 тока якоря двигателя 6 подъемной машины 7, снабженной датчиком 8 скорости.
Выходы датчика 8 и блока 2 подключены к входам блока 9 сравнения, выход которого соединен с одним из входов блока 10 логики, к другим входам блока 10 подключены выходы блока 11 датчиков начала разгона и замедления и исполнительного механизма 12.
Выход блока 10 подключен к одному из входов коммутатора 13, другой вход которого подключен к выходу датчика 5, а выход - к одному из входов блока 14 памяти.
К другому входу блока 14 подключен выход блока 15 компенсации изменения веса канатов, а выход блока 14 подключен к одному из входов другого блока 16 сравнения, соединенного своим другим входом с датчиком 5, а выходом - с исполнительным механизмом 12.
Устройство работает следующим образом. Блок 1 может выдавать программы с различными скоростями максимального (равномерного) движения сосудов подъемной машины 7.
Блок 2 содержит дискретные уставки (эквиваленты) равные максимальным скоростям упомянутых программ. Одновременно с выбором одной из программ для конкретного цикла подъема блок 1 выбирает уставку в блоке 2, соответствующей именно выбранной программе. Блок 2 выдает уставку (например, в виде напряжения или тока) на один из входов блока 9 сравнения, на другой вход которого подключен выход датчика 8 скорости. Согласно выбранной программы регулятор 3 и двигатель 6 производят изменение скорости машины 7.
Выход датчика 5 через нормально закрытый ключ коммутатора 13 и блок 14 памяти одновременно подключен к обоим входам второго блока 16 сравнения. Так как в этом случае сигналы на входах блока 16 но величине одинаковы и разнополярны, то разностный сигнал близок или равен нулю. После разгона подъемной машины 7 до заданной скорости разностный сигнал на выходе блока 9 тоже будет близок к нулю, при этом блок 10 логики срабатывает и изменит положение коммутатора 13. Коммутатор 13 отключает выход датчика 5 от
входа блока 14 памяти, который переходит в режим выдачи уставки тока. Причем величина уставки определяется амплитудой тока, зафиксированной в блоке 14 памяти в момент переключения коммутатора 13. Исполнительный механизм 12 имеет регулируемую зону чувствительности, поэтому он срабатывает лишь при появлении разностного сигнала на выходе блока 16 большего, чем заданная зона нечувствительности механизма 12.
Появление такого сигнала возможно лишь в случае появления дефектов в армировке ствола или в самом электроприводе подъемной машины 7. Срабатывание механизма 12 нриведет к тому, что блок 1 для последующего цикла подъема выдаст программу с максимальной скоростью равномерного движения сосудов ниже на по сравнению со скоростью, при которой произошло первое включение исполнительного механизма 12. Если при повторном цикле движения сосудов опять срабатывает механизм 12, процесс снижения скоростей последующих циклов повторится
до полной остановки подъемной машины 7. Что же касается сигнала, подаваемого на пульт машиниста при первом же срабатывании механизма 12, то он может быть снят после выявления причины его срабатывания. Соединение выхода механизма 12 с блоками 10 и 2 обеспечивает им готовность для последующих циклов подъема.
Соединение выхода блока 11 датчиков начала разгона и замедления с первым
входом блока 10 логики обеспечивает подключение блока 14 памяти через коммутатор 13 к выходу датчика 5. В этом случае механизм 12 не может выдавать сигнал на выходе до завершения разгона последующего цикла движения сосудов.
Для исключения влияния изменяющегося веса каната на работу механизма 12 выход блока 15 компенсации изменения веса канатов подключен к первому входу блока 14
памяти. Это позволяет ввести коррекцию сформированной уставки тока якоря по фактическому весу каната, изменяющегося в функции пути, пройденного сосудами или грузом.
Таким образом, устройство позволяет после разгона сосудов до максимальной скорости выбрать уставку тока якоря с учетом фактической величины веса транспортируемого груза и тем самым точно установить
оптимальный скоростной режим работы подъемной установки. Это в свою очередь обеспечивает своевременное выявление дефектов в элементах подъемного комплекса и принятые меры (предупреждение машиниста, снижение скорости сосудов, полная
остановка машины и т. д.), исключающие возможность появления аварий в шахте,
Формула изобретения
Устройство для выбора скоростного режима подъемной установки, содержащее блок задания программы изменения скорости с блоком выдачи дискретных уставок по скорости, соединенный своим выходом с регулятором скорости с узлом токовой отсечки, датчик тока якоря двигателя, соединенный со входом узла токовой отсечки и одним из входов одного блока сравнения, и датчик скорости, выход которого соединен с одним из входов другого блока сравнения, подключенного своим другим входом к выходу блока подачи дискретных уставок по скорости, отличающееся тем, что, с целью повышения точности, оно снабжено блоком датчиков начала разгона и торможения, блоком компенсации изменения веса канатов, блоком памяти, блоком логики и
коммутатором, при этом блок логики соединен своими входами соответственно с выходами одного из элементов сравнения, блока датчиков начала разгона и замедления и с выходом исполнительного механизма, а выходом - с одним из входов коммутатора, соединенного другим своим входом с выходом датчика тока якоря, а выходом - с одним из входов блока памяти, другой вход которого подключен к выходу блока компенсации изменения веса канатов, а выход соединен с другими входами другого блока сравнения, выход которого соединен со входом исполнительного механизма.
Источники информации, принятые во внимание при экспертизе
1.Киричек Ю. Г., Чермалык В. М. Привод шахтных подъемных установок большой мощности. М., 1972, с. 79, 315.
2..Заявка № 2305991/11, 29.12.75, по которой принято решение о выдаче авторского свидетельства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для токовой защиты электропривода подъемной установки | 1981 |
|
SU961028A1 |
| Устройство для управления скоростным режимом подъемной установки | 1975 |
|
SU546551A1 |
| Устройство для контроля режимовРАбОТы пОд'ЕМНОй уСТАНОВКи | 1977 |
|
SU796142A1 |
| Устройство для токовой защиты электропривода шахтной подъемной установки | 1977 |
|
SU674141A1 |
| Электропривод подъемной машины | 1987 |
|
SU1511837A1 |
| Система обеспечения безопасности работы шахтных подъемных установок при застревании сосудов в стволе | 1989 |
|
SU1676983A1 |
| Устройство для защиты шахтной подъемной установки при заклинивании подъемного сосуда в стволе | 1978 |
|
SU977348A2 |
| Устройство для управления электроприводом шахтной подъемной машины | 1986 |
|
SU1388377A1 |
| Устройство для выбора тормозных режимов подъемной машины | 1976 |
|
SU605777A1 |
| Устройство защиты шахтного подъемника от напуска каната | 1980 |
|
SU933594A1 |
