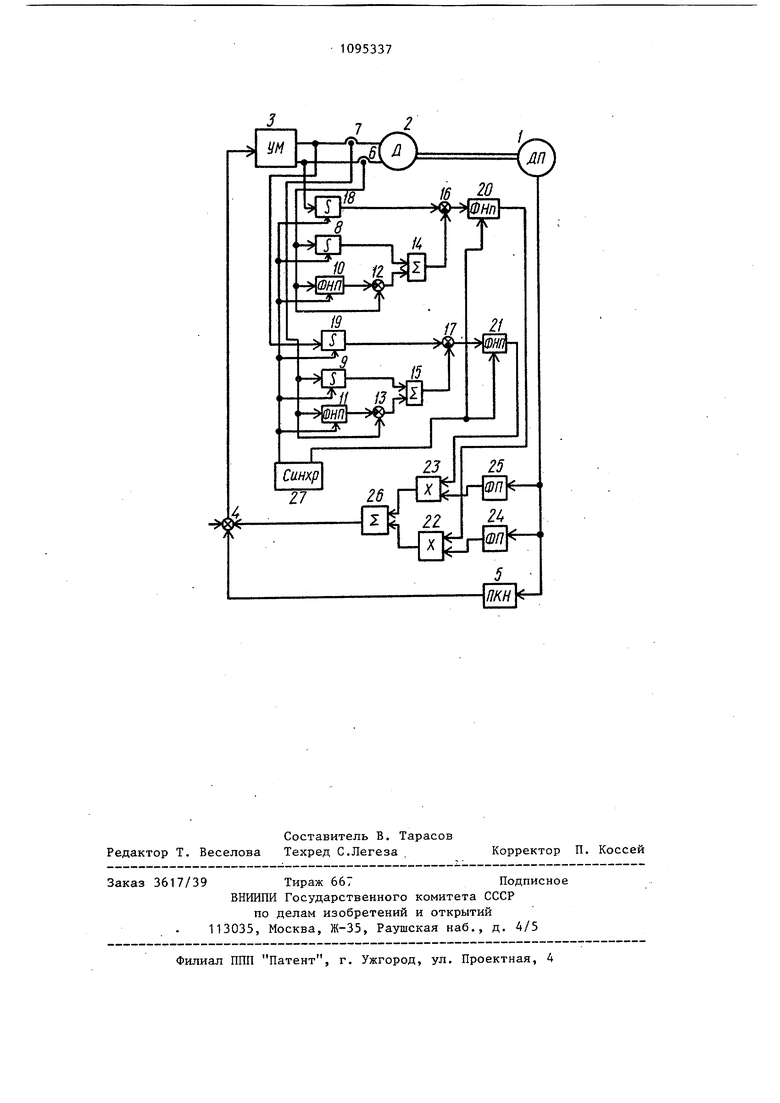
f Изобретение относится к электротехнике и могхет быть использовано для управления угловым положением объекта. Известен следящий электропривод с демпфирующим тахогенератором, в ко тором по положению обратная связь осуществляется с помощью датчика угла ij . Недостатком этого электропривода является невысокий диапазон регулирования за счет наличия низкочастотных пульсаций в напряжении тахогенератора. В результате ухудшается качество слежения на низких скоростях Наиболее близким к изобретению по технической сущности является следящий электропривод, содержащий датчик угла, вал которого соединен с двигателем, подключенным через усилитель мощности к выходу элемента сравнения, один вход которого через преобразователь кода в напряжение соединен с выходом датчика угла. Входы функциональных преобразователе кода в напряжение подключены к выходу датчика угла, а их выходы - к вхо дам множительных устройств, выходы которых подключены к входам сумматора, выход которого соединен с другим входом элемента сравнения. Для обеспечения обратной связи по скорос ти используется синхронньш тахогенератор 2 . Недостатком данного привода является необходимость использования синхронного тахогенератора, что приводит к усложнению конструкции привода. Цель изобретения - упрощение кой-струкции электропривода. Для достижения поставленной цели в следящий электропривод, содержащий синхронный двигатель, датчик угла, вал которого соединен с синхронным двигателем, подключенным через . усилитель мощности к выходу элемента сравнения, один вход которого через преобразователь кода в напряжени соединен с выходом датчика угла и с входами двух функциональных преобразователей кода в напряжение, выходы которых подкл1очены к входам двух мно жительных блоков, выходы которых под ключены к входам сумматора, выход которого соединен с другим входом элемента сравнения, введены два первых и два вторых фиксатора нулевого 37 порядка, два первых и два вторых интегратора со сбросом, два сумматора, ва первых и два вторых элемента сравнения, синхронизатор и два датчика тока, выходы каждого из которых подключены к входам соответствующих первых введенных интеграторов со сбросом, к входам первых фиксаторов нулевого порядка и к суммирующим входам первых введенных элементов сравнения,вычитающие входы которых соединены с соответствующими выходами первых фиксаторов нулевого порядка, а их выходы подключены к первым входам введенных сумматоров, другие входы которых соединены с выходами интеграторов со сбросом, а их выходы подключены к вычитающим входам вторых введенных элементов сравнения, суммирующие входы котооых через вторые интеграторы со сбросом подключены к выходам усилителя мощности, а их выходы соединены со входами вторых фиксаторов нулевого порядка, выходы которых подключены к входам множительных блоков, второй выход синхронизатора соединен с ключами сброса всех интеграторов и с тактовыми входами первых фиксаторов нулевого порядка, а его первый выход подключен к тактовым входам вторых фиксаторов нулевого порядка. На чертеже приведена функциональная схема следящего электропривода. Следящий электропривод содержит датчик угла 1, синхронный исполнительный двигатель 2, усилитель мощности 3, элемент сравнения 4, преобразователь кода в напряжение 5, датики тока 6 и 7, два первых интегратора со сбросом 8 и 9, два первых фиксатора нулевого порядка 10 и 11, два первых элемента сравнения 12 и 13, сумматоры 14 и 15, два вторых элемента сравнения 16 и 17, два вторых интегратора со сбросом 18 и 19, Два вторых фиксатора нулевого порядка 20 и 21, множительные блоки 22 и 23, функциональные преобразователи кода в напряжение 24 и 25, сумматор 26, синхронизатор 27. Вал датчика угла 1 соединен с валом двигателя 2, который через усилитель мощности 3 подключен к выходу элемента сравнения 4, один вход которого через преобразователь кода в напряжение 5 соединен с выходом датчика угла. Выходы датчиков тока 6 3 и 7 подключены к входам первых интеграторов со сбросом 8 и 9, к входам первых фиксаторов нулевого по- рядка 10 и 11 и к суммирующим входам первых элементов сравнения 12 и 13, вычитающие входы которых соединены, с выходами фиксаторов нулевого порядка 10 и 11, а их выходы подклю чены к входам сумматоров 14 и 15, другие входы которых соединены с вы ходами первых интеграторов со сбросом 8 и 9, а их выходы подключены к вычитающим входам первых элементов сравнентш 16 и 17, суммирующие входы которых через вторые интеграт ры со сбросом 18 и 19 подключены к выходам усилителя мощности 3, а их выходы соединены с входами вторых фиксаторов нулевого порядка 20 и 21 выходы которых подключены к входам множительных блоков 22 и 23, к другим входам которых подключены выходы функциональных преобразователей код в напряжение 24 и 25, входы которых подключены к выходу датчика угла 1. Выходы множительных блоков 22 и 23 подключены к входам сумматора 26, выход которого соединен с другим входом элемента сравнения 4 Кроме того, первьй выход синхронизатора 27 подключен к тактовым входам вторых фиксаторов нулевого порядка 20 и 21, а его второй выход соединен с ключами сброса всех интеграторов 8, 9, 18, 19 и с тактовы ми входами первых фиксаторов нулевого порядка 10 и 11. Устройство работает следующим об разом. При подаче на элемент сравнения управляющего сигнала привод приводится во вращение. Сигналы с датчиков тока- 6 и 7 поступают на входы первых интеграторов со сбросом 8 и 9, первых фиксаторов нулевого порядка 10 и 11, элементов сравнения 12 и 13. На интеграторе 8 (9) фор)ируется напряжение t W lHtldt, где t; - момент выборки синхроимпул са на втором выходе синхро низатора 27 J К - коэффициент пропорциональности. На выходе фиксатора нулевого порядка -10 (11) фиксируется напряжени .. %) 2 (t;). На выходе элемента сравнения ) получаем напряжение . iQOsi Xan tj-Uti). На выходе сумматора 14 (15) выходе 1 M,5rKilnt)c3i + )-iit). . , . Напряжения с выходов усилителя ности поступают на входы вторых еграторов 18 и 19, с выходов ко-: ьпк снимаются напряжения i8lu.dt.u,.. t; t; На выходе элемента сравнения 16 мируется напряжение i I Vp.dt-k.I;(t)cJt-k,.(t)M(t,); . На выходе фиксатора нулевого пока 20 запоминается напряжение tu) ;1иД-. UUdt-K,Ut;,,).,(i.J . 4. t;+Т )Т-1| - интервал дискретности, - частота синхроимпульсов. Покажем, что при соответствующем оре коэффициентов К и К я напряие Ufjg пропорционально ЭДС фазы гателя. Для каждой фазы двигатеможно записать E U-iR-L /dt. Проинтегрировав записанное yjpaBие, получим Ui ;+,t;+ { Udt-RJ ,сЗМ d./jt ,;t; JH i.,, jEa.j Udt-RJ ,, VUt,). Цt; При сра.внении полученного равена с выражением для видно, что WtjnpnR K , v - j Ea--VC,Eltel rftet,tgtt., ti Кз соп51 npnT-t -t i coost. При достаточно высокой частоте хроимпульсов ступенчатая кривая Ugj практически не отличается от кр вой ЭДС двигателя и можно записать UjoVi E,-, U,fe,,E2 . Сигналы U-20 также сигна с датчика положения используются дл формирования напряжения, пропорционального мгновенной скорости двигателя. Для этого сигналы с выхода датчика угла 1 в виде цифрового кода поступают на входы двух функциональных преобразователей кода в на пряжение 24 и,25, которые формируют напряжения U24-U -5intf MU25--U.cosq), где У - угол поворота вала; Uf - напряжение питания. Эти напряжения подаются на входы множительных блоков 22 и 23, на др гие входы которых подаются синфазные с напряжениями U,24 напря жения, пропорциональные ЭДС, фаз двигателя 2: (U,, K--5 nCfU,,. На выходах множительных блоков 22 и 23 формируются напряжения вида dq) (Зц )U. Cf На выходе сумматора 26 получшот напряжение и.,--и,,ли„-ки т:ЫЛ4со9 Ч) пропорциональное мгновенной угловой скорости двигателя. Это напряжение используется для демпфирования привода и подается на один из входов элемента сравнения 4. На другой его вход через преобразователь кода в напряжение 5 подается сигнал обратной связи .по углу, снимаемый с датчика угла 1. Согласованная работа схемы обеспечивается синхронизатором 27. В моменты импульсы с первого выхода синхронизатора поступают на фиксаторы нулевого порядка 20 и 21, при этом происходит запоминание результирующих напряжений на выходах элементов сравнения 16 и 17. Импульсы со второго выхода синхронизатора вырабатываются с минимальной задержкой О сразу же вслед за импульсами с первого выхода, причем соблюдается соотношение II Т. Импульсами со второго выхода синхронизатора производится сброс всех-интеграторов, а также запоминание выходного сигнала датчиков тока 6 и 7 на фиксаторах нулевого порядка 10 и Таким образом, предлагаемый электропривод обладает более простой конструкцией, поскольку отсутствует тахогенератор в виде электрической машины. Дополнительно введенные элементы являются стандартными полупроводниковыми приборами, которые не могут существенно усложнить конструкцию привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, РАКЕТА, ВРАЩАЮЩАЯСЯ ПО УГЛУ КРЕНА, СПОСОБ ФОРМИРОВАНИЯ ДВУХСКАТНОГО ЛИНЕАРИЗИРОВАННОГО СИГНАЛА И ПЕРЕКЛЮЧАЕМЫЙ ЛИНЕАРИЗАТОР СИГНАЛА | 2005 |
|
RU2283466C1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1300412A2 |
| Измеритель среднеквадратического значения напряжения одиночного импульса случайной формы и длительности | 1987 |
|
SU1429054A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2572805C1 |
| Устройство для вычисления статического момента вентильного электропривода | 1979 |
|
SU947880A1 |
| Следящий электропривод | 1978 |
|
SU773884A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| Электропривод переменного тока | 1989 |
|
SU1757041A1 |
| Автопрокладчик | 1977 |
|
SU695331A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД, содержащий синхронный двигатель, датчик угла,вал которого соединен с синхронным двигателем, подключенным через усилитель мощности к выходу элемента сравнения, один вход которого через преобразователь кода в. напряжение соединен с выходом датчика угла и с входами двух функциональных преобразователей кода в напряжение, выходы которых подключены к входам двух множительных блоков, выходы которых подключены к входам сумматора, выход которого соединен с другим входом элемента сравнения, отличающийся тем, что, с целью упрощения конструкции электропривода, в него введены два первых и два вторых фиксатора нулевого порядка, два первых и два вторых интегратора со сбросом, два сумматора, два первых и два вторых элемента сравнения, синхронизатор и два датчика тока, выходы каждого из которых подключены к входам соответствующих первых интеграторов со сбросом, к входам первых фиксаторов нулевого порядка и к суммирующим входам первых введенных элементов сравнения, вычитающие входы которых соединены с соответствующими выходами первых , фиксаторов нулевого порядка, а их выходы подключены к первым входам введенных сумматоров, другие входы а ю которых соединены с выходами интеграторов со сбросом, а их выходы подСО ключены к вычитающим входам вторых с: введенных элементов сравнения, суммирующие входы которых через вторые интеграторы со сбросом подключены к выходам усилителя мощности, а их выходы соединены с входами вторых фик:0 СП саторов нулевого порядка, выходы которых подключены.к входам множительных блоков, второй выход синхронизао:) тора соединен с ключами сброса всех интеграторов и с тактовыми входами первых фиксаторов нулевого порядка, а его первый выход подключен к тактовым входам вторых фиксаторов нулевого порядка.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Блейз E.G | |||
| Динамика электромагнитных следящих систем | |||
| М., Энергия, 1967, с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Следящий привод | 1975 |
|
SU546853A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
