Изобретение относится к подъемно-транспортному оборудованию и может быть использовано в качестве элемента крепления крупногабаритных грузов за выступы на палубе судна.
Известен захват для крепления конструкций, подвижных относительно друг друга, содержащий скобу-подвеску с направляющими пазами в захватной части и поворотными защепкамп, причем захватные части скобы-подвески выполнены с расширением в верхней части и снабжены наклонными планками 1. Одпако этот захват предназначен только для грузов с .цапфами и не всегда может быть использован для крепления на палубе судна.
Наиболее близким техническим решением, приняты.м за прототип, является автоматический захват, предназначенный для грузов с фигурной головкой, состоящий из корпуса полого толкателя с пружиной, захватных губок, взаимодействующих с фигурным стыковочным щтырем, устанавливаемым на конструкции, с которой осуществляется стыковка, и механизмом фиксации 2.
Недостатком такого захвата является невозможность его применения для конструкций, предназначенных для стыковки с палубой судна в условиях волнения моря, так как под действием нагрузок, имеющих место при качке, вдоль оси стыковочного захвата будет
происходить его самопроизвольная расстыковка, это недопустимо при проведении погрузочно-разгрузочных операций в открытом море.
Целью предлагаемого изобретения является повышение надежности креплення грузов за выступы на палубе судна в условиях волнения моря.
Указанная цель достигается выполнением конструкции стыковочного захвата таким образом, что нагрузки от оси стыковочного узла восприни.маются кориусом захвата, а не подвижным штырел, а также путем установки в толкателе подпружиненного фиксирующего стержня со скошенными поверхностями и пазом и выполнением .механизма фиксации в виде подпружиненного кулачка со скосами, взаимодействующего с пазом стержня. Для обеспечения цовторной установки захвата на выступы палубы судна он снабжен механизмом возврата, выполненным в виде подпружиненного щтыря с ручкой с одной стороны и скосом с другой, установленного в и взаимодействующего своим скосом со скосом кулачка фиксатора.
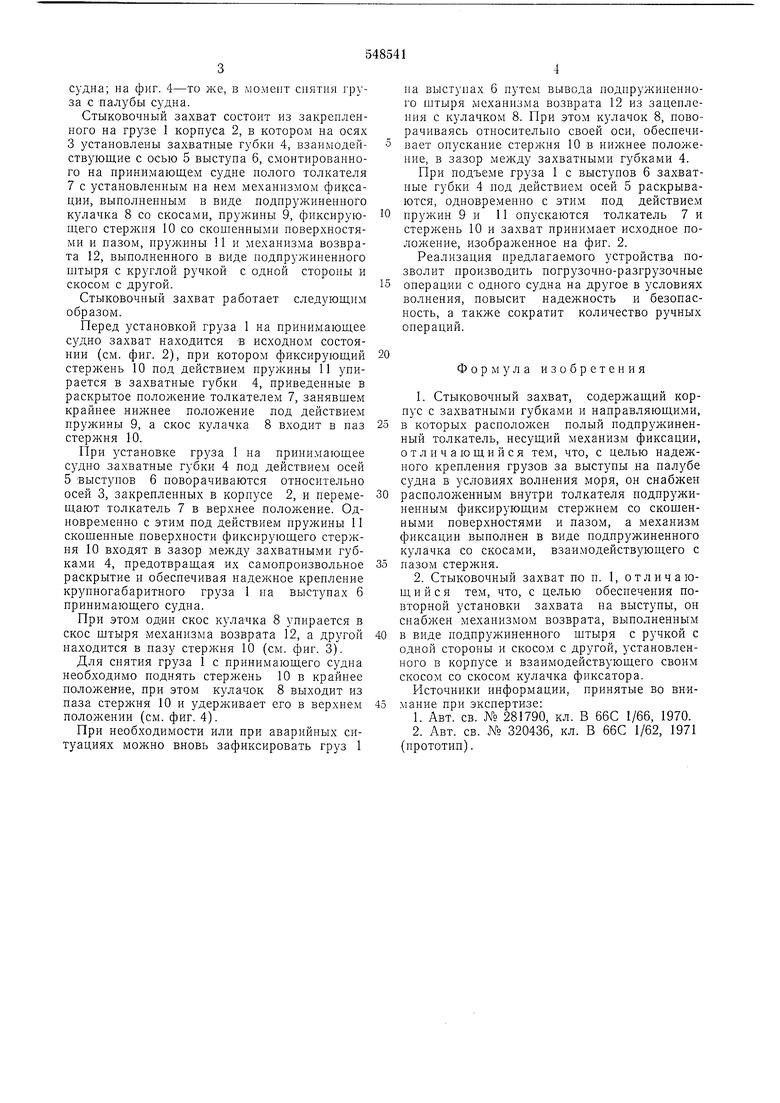
На фпг. 1 изобра/кена схема установки крупногабаритных грузов па принимающее судно; на фиг. 2-стыковочный захват в исходно.м положенпп, перед установкой его на выступы на палубе судна; на фпг. 3-то же, в момент установки на выступы на палубе
судна; на фиг. 4-то же, в момент снятия груза с палубы судна.
Стыковочный захват состоит из закренленного на грузе 1 корнуса 2, в котором на осях 3 установлены захватные губки 4, взаимодействующие с осью 5 выступа 6, смонтированного на принимающем судне полого толкателя 7 с установленным на нем механизмом фиксации, выполненным в виде подпружиненного кулачка 8 со скосами, пружины 9, фиксирующего стержия 10 со скошенными поверхностями и пазом, пружины 11 и механизма возврата 12, выполненного в виде подпружиненного штыря с круглой ручкой с одной стороны и скосом с другой.
Стыковочный захват работает следующим образом.
Перед установкой груза 1 на принимающее судно захват находится в исходном состоянии (см. фнг. 2), при котором фиксирующий стержень 10 под действием 11 упирается в захватные губки 4, приведенные в раскрытое положение толкателем 7, занявшем крайнее нижнее положение под действием прулсины 9, а скос кулачка 8 входит в паз стержня 10.
При зстановке груза 1 на принимающее судно захватные губки 4 под действием осей 5 выступов 6 поворачиваются относительно осей 3, закрепленных в корпусе 2, и перемещают толкатель 7 в верхнее положение. Одновременно с этим под действием пружины 11 скошенные поверхности фиксирующего стержня 10 входят в зазор между захватными губками 4, предотвращая их самопроизвольное раскрытие и обеспечивая надежное крепление крупногабаритного груза 1 на выступах 6 принимающего судна.
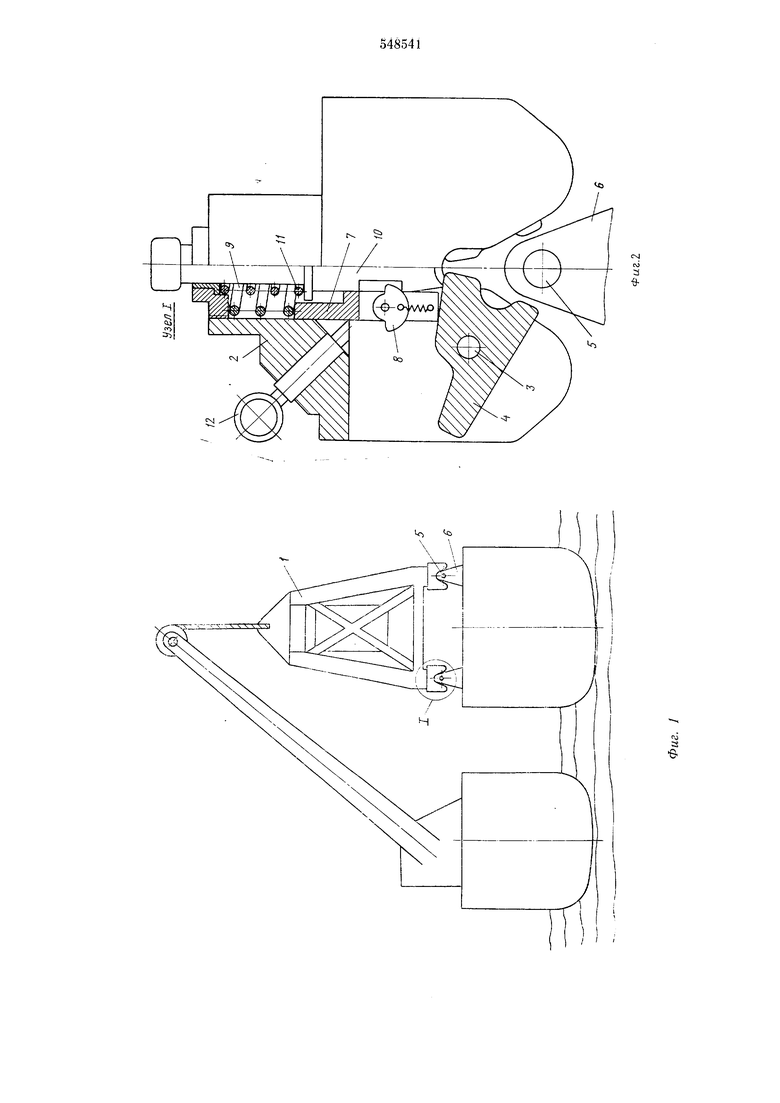
При этом один скос кулачка 8 упирается в скос штыря механизма возврата 12, а другой находится в пазу стержня 10 (см. фиг. 3).
Для снятия груза 1 с принимающего судна необходимо поднять стержень 10 в крайнее положение, при этом кулачок 8 выходит из паза стержня 10 и удерживает его в верхнем положении (см. фиг. 4).
При необходимости или при аварийных ситуациях можно вновь зафиксировать груз 1
на выступах 6 путем вывода поднружииенного штыря механизма возврата 12 из зацепления с кулачком 8. При этом кулачок 8, поворачиваясь относительно своей оси, обеснечивает опускание стержня 10 в нижнее положение, в зазор между захватными губками 4.
При подъеме груза 1 с выступов 6 захватные губки 4 под действием осей 5 раскрываются, одновременно с этим под действием пружин 9 и 11 опускаются толкатель 7 и стержень 10 и захват принимает исходное положение, изобрал енное на фиг. 2.
Реализация нредлагаемого устройства позволит производить погрузочно-разгрузочные операции с одного судна на другое в условиях волнения, повысит надежность и безопасность, а также сократит количество ручных операций.
Формула изобретения
1.Стыковочный захват, содержащий корпус с захватными губками и направляющими, в которых расположен полый подпружиненный толкатель, несущий механизм фиксации, отличающийся тем, что, с целью надежного крепления грузов за выступы на палубе судна в условиях волнения моря, он снабжен расположенным внутри толкателя подпружиненны.м фиксирующим стержнем со скошенными поверхностями и пазом, а механизм фиксации выполнен в виде подпружиненного кулачка со скосами, взаимодействующего с пазом стержня.
2.Стыковочный захват по п. 1, отличающийся тем, что, с целью обеспечения повторной установки захвата на выступы, он снабжен механизмом возврата, выполненным в виде подпружиненного штыря с ручкой с одной стороны и скосом с другой, установленного в корпусе и взаимодействующего своим скосом со скосом кулачка фиксатора.
Источники информации, принятые во BH«мание при экспертизе:
1 Авт. св. № 281790, кл. В 66С 1/66, 1970.
2. Авт. св. № 320436, кл. В 66С 1/62, 1971 (прототип).
3
fr
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ ТЕКУЧЕЙ СРЕДЫ К ПЛАВАЮЩЕМУ СУДНУ | 2013 |
|
RU2538739C1 |
| ТРЕНАЖЕР | 1991 |
|
RU2015705C1 |
| Устройство для зажима инструмента в шпинделе | 1983 |
|
SU1113218A1 |
| Захватное устройство для грузов с головкой | 1987 |
|
SU1519996A1 |
| Устройство для подачи и удаления заготовок из рабочей зоны пресса | 1981 |
|
SU986550A1 |
| Устройство для обвязки бухт, механизм захвата и подачи бухт и механизм подачи обвязочного материала | 1989 |
|
SU1703560A1 |
| Устройство для подачи полосового и ленточного материалов в зону обработки | 1987 |
|
SU1489900A1 |
| Грузозахватное устройство | 1978 |
|
SU906899A1 |
й &
/
