Изобретение относится к устройствам для передачи движения различным исполнительным механизмам и может быть использовано в устройствах для передачи движения в герметизированном объеме и в вакууме.
Известны устройства для передачи движения, содержащие силовой привод и орган перемещения, выполненный в виде многозвенного механ тзма, включающего шарнирные соединения, пары трения 1.
Недостатком этих устройств является сложность конструкции и наличие заеданий в шарнирных соединениях и парах трения, что ограничивает возможность их применения в герметизированных объемах и в вакууме из-за интенсивного износа и заеданий иодвижных соединений, нриводящих к отказам в работе устройства.
Прототипом изобретения является устройство для передачи движения, например в вакуум, содержащее силовой привод и орган перемешения, имеющий сложную систему передач с наличием шарнирных соединений и нар трения, расположенных как внутри вакуумного объема, так и вне его 2.
Недостатками этого устройства является сложность конструкции и наличие пар трения.
Целью изобретения является упрощение конструкции, исключение пар трения и обеспечение пространственного перемещення.
Указанная цель достигается тем, что орган перемещения устройства выполнен в виде герметичного полого упругого элемента, имеющего ио крайней мере, один криволинейный участок с некруглой формой поиеречного сечения и соединенного с силовым приводом командного давления, причем упругий элемент может иметь два или более криволинейных участка, расположенных в пересекающихся плоскостях.
На фиг. 1 схематически изображено устройство для передачи движения; на фиг. 2 - устройство с двумя криволинейными участками для пространственного перемен1,ения; на фиг.
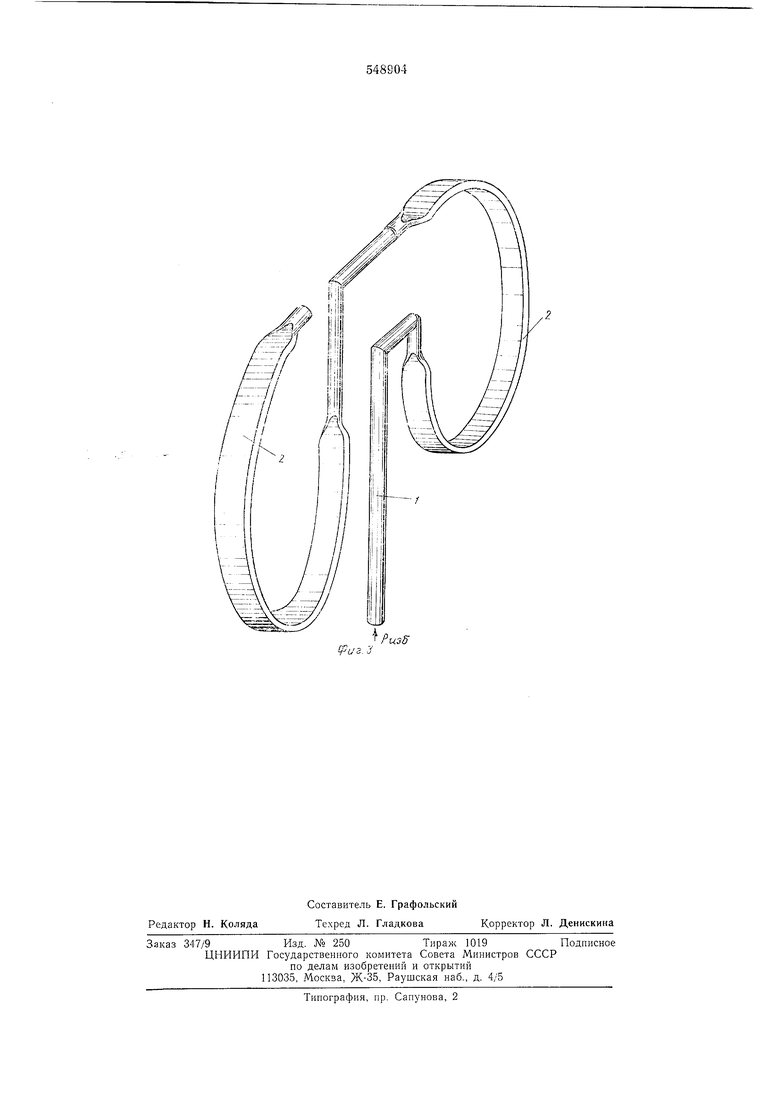
3 - вариант выполнения устройства.
Устройство передачи движения (фиг. 1) содержит орган перемеи,ения 1, вынолненный в виде герметического полого упругого элемента, имеюн,его один криволинейный участок 2 с некруглой формой поперечного сечения и силовой привод в виде источника командного давления газа или жидкости (иа чертеже не показан).
Герметичный элемент у одного конца жестко крепится к основанию, в частности к корпусу герметизированного объема или вакуумной камеры.
Орган перемещения 1 может содержать два криволинейных участка 2 (фиг. 2), расположенных в пересекающихся плоскостях, что
обеспечивает его пространственное перемещение.
Один из вариантов исполнения устррйст ва, изображенный на фиг. 3, содержит комбинацию сочетания двух устройств для передачи движения каждое из которых содержит орган перемещения 1, включающий криволинейный участок 2 и соединенный с источником командного давления газа или жидкости.
Устройство передачи движения работает следующим образом.
Во внутреннюю полость органа перемещения от источника командного давления подают газ или жидкость. Под действием внутреннего давления криволинейный участок 2 испытывает упругую деформацию, создающую перемещение незакреплеиного конца органа перемещения 1.
Изменение величины давления газа или жидкости приводит к изменению величины перемещения и усилия, развиваемого незакрепленным концом органа перемещения.
Использование предлагаемого устройства для нередачи движения в герметизированный объем или в вакуум уирощает конструкцию и обесиечивает новышеиие иадежиости работы за счет отсутствия пар трения.
Формула изобретения
1.Устройство передачи движения, например, в гермегизированньш объем или в вакуум, содержащее силовой иривод и орган перемещения, отличающееся тем, что, с целью упрощения конструкции и исключения пар трения, орган перемещеиия выполнен в виде герметичного полого упругого элемента, имеющего по крайней мере один криволинейный участок с некруглой формой ноперечного сечения и соединенного с силовым нриводом командного давления.
2.Устройство но и. 1, отличающееся тем, что, с целью обеспечения пространственного перемещения, упругий элемент имеет два или более криволинейных участка, расположенных в пересекающнхся плоскостях.
Источники информации, принятые во внимаиие при эксиертизе:
1. Закиров Ф. Г., Николаев Е. А. «Откачниквакуумщик, М., «Высшая школа, 1973, рис.
75. 2. Данилин Б. С., Минайчев В. Е. «Основы
конструирования вакуумных систем, М.,
«Энергия, 1971, рис. 3-102 (прототип).
PujS ff
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство передачи движения | 1980 |
|
SU898535A2 |
| Устройство для передачи движения | 1990 |
|
SU1780119A1 |
| Вакуумный манипулятор | 2018 |
|
RU2691168C1 |
| Устройство ввода движения в герметизированную камеру | 1982 |
|
SU1062801A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 2018 |
|
RU2706904C1 |
| Устройство для захвата и юстировки детали | 1977 |
|
SU744775A1 |
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
| Вакуумный манипулятор | 2018 |
|
RU2691173C1 |
| МАНИПУЛЯТОР С ВАКУУМНОЙ КАМЕРОЙ | 2018 |
|
RU2713999C1 |
| Способ Чуйко внутренней монолитной изоляции сварного соединения трубопровода (варианты) | 2017 |
|
RU2667856C1 |