(54) ТРЕЛЕВОЧНАЯ КАРЕТКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Трелевочная каретка | 1985 |
|
SU1271781A1 |
| Трелевочная каретка | 1974 |
|
SU487800A1 |
| Трелевочная каретка канатной дороги | 1983 |
|
SU1115950A1 |
| Трелевочная каретка | 1987 |
|
SU1416353A1 |
| Трелевочная каретка канатной дороги | 1985 |
|
SU1306778A1 |
| Трелевочная каретка | 1977 |
|
SU617310A1 |
| Трелевочная каретка подвесной канатной дороги | 1987 |
|
SU1418130A1 |
| Трелевочная установка | 1973 |
|
SU467876A1 |
| Трелевочная каретка | 1982 |
|
SU1127790A1 |
| Трелевочная каретка подвесной канатной дороги | 1986 |
|
SU1355527A1 |
1
Изобретение относится к лесозаготовительной технике и может применяться при освоении горных лесосек канатно-подвесными установками.
Известна трелевочная каретка, включаю- щая ходовые тележки, захваты, пильный орган, привод,
Недостаток этой каретки состоит в том, что спиливать деревья нужно ручным механизмом, кроме того, работа малопроизводительна, трудоемка и опасна.
Известна также трелевочная каретка канатно-подвесной установки, включающая корпус с грузозахватным устройством, пильным органом и приводом перемещения.
Эта каретка, однако, вынуждена при транспоргировке дерева возить с собою всю трансмиссию пильного аппарата, который является самым дорогим устройством в каретке, при этом резко снижается грузоподъемность установки (пильный орган является дополнительным грузом) и снижается скорость транспортировки дерева (чтобы избежать динамических нагрузок на пильный орган), а
все это в конечном итоге влияет на производительность канатной установки.
Цель изобретения - механизация процесса спиливания и транспортировки деревьев.
Это достигается тем, что корпус каретки выполнен в виде двух разъемных частей, на одной из которых установлено грузозахватное устройство ствола дерева, а на другой пильный орган с зажимом для пня дерева, кроме того, на последней части каретки установлены рычаги с возможностью отклонения их.
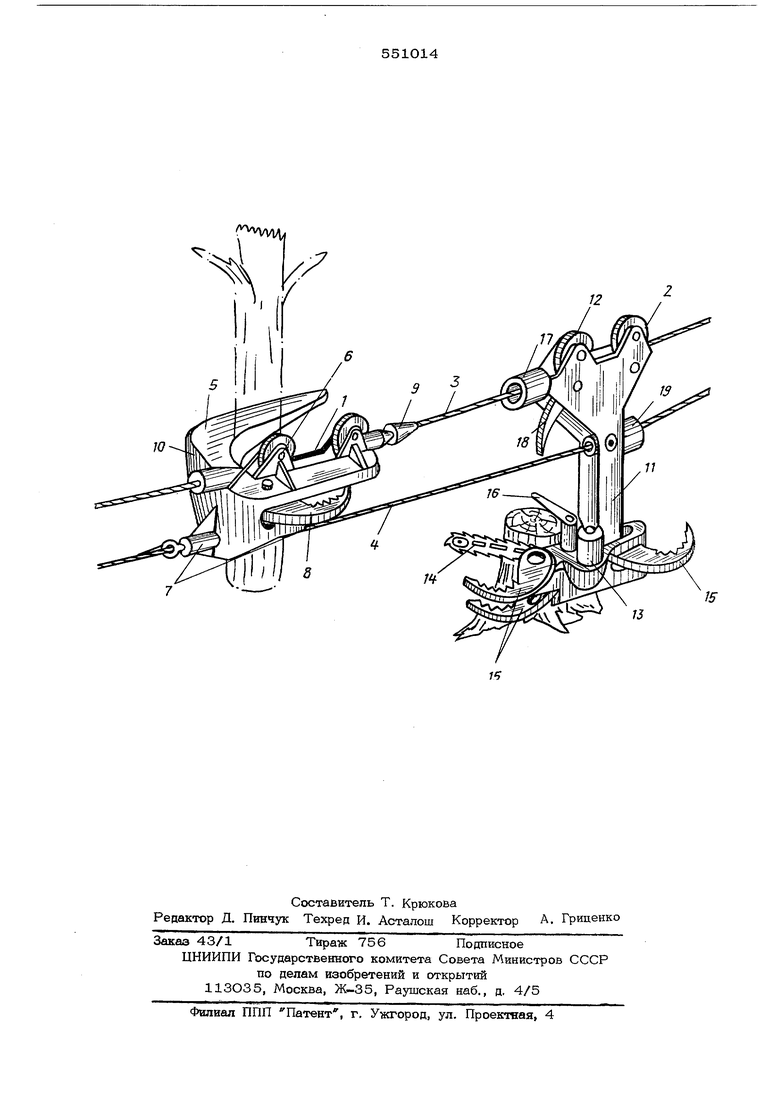
На чертеже изображена трелевочная каретка, общий вид.
Каретка имеет две части: пассивную 1 и активную 2. В транспортном положении без груза пассивная и активная части каретки состыкованы и висят на ветвях каната 3,4.
Пассивная часть каретки имеет корпус 5, который при помощи ходовой тележки 6 навешен на ветвь 3 тягово-несущего каната, и с помощью вертлюгов 7 соединен с ветвью 4 этого же каната, в корпусе имеется также грузозахватное устройство 8 и сты- ковочная бобышка 9, а упорная бобышка 10 закреплена на ветви 3 каната. Активная часть каретки имеет корпус 11, который при помощи ходовой тележки 12 навешан на ветвь 3-тягово-несушего каната. В нижней части корпуса установлен привод 13 пильного органа 14 и захвата 15 пил дерева. Управление захватом автоматическое и осуществляется с помощью датчика 16. В верхней части корпус имеет гнездо 17 для стыковки с бобышкой 9 пассивной части каретки и рычаг 18 для фиксации частей кареток и захватов, а также направляющая 19 для пропуска тяггово-несущего каната. Работает описанная каретка следующим образом. В исходном положении стыковочная бобышка 9 входит в гнездо 17 и две части каретки в стыковочном состоянии подают на лесосеку. Как только каретка достигает пер вого дерева, которое попадает в грузозахва-р ное устройство 8, датчик 16 дает команду на зажим захвата 15 пня дерева и включает в работу пильный орган 14, который производит отделение ствола дерева от корневой системы. Падающее дерево воздействует на рычаг 18, с помощью которого происходит разьединение частей каретки, при этом бобышка 9 выходит из гнезда 17, и пассивная часть каретки 1 транспортирует дерево в пачку, а активная часть 2 остается на пне, удерживаемая захватом 15; две ветви каната пропускают через корпус 11 каретки 2, ко- торый в момент транспортировки дерева служит канату дополнительной опорой. У места сбора пачки дерево автоматически освобождается из грузозахватного устройства 8 и при обратном движении канатов пассивная часть каретки возвращается к оставшейся на пне активной части каретки, бобышка 9 входит в гнездо 17 и одновременно пассивная часть каретки воздействует на рычаг 18. который выдает команду на разжим захвата 15 и в состыкованном состоянии каретка подается к следующему дереву, где цикл срезания и транспортировки дерева повторяется. Наличие двух частей каретки позволяет вести операцию транспортировки дерева без трансмиссий пильного органа, что примерно на 30-4О% повышает грузоподъемность установки, и на столько же могут быть увеличены скорости транспортировки груза. Все это полностью автоматизирует nfiouecc заготовки дерева на горных лесосеках Формула изобретения 1.Трелевочная каретка канатно-подвесной установки, включающая корпус с грузозахватным устройством, пильным органом и приводом перемещения, отличающаяс я тем, чго, с целью обеспечения механизации процесса спиливания и транспортировки деревьев, корпус каретки выполнен в виде двух разъемных частей, на одной из которых установлено грузозахватное устройство, а на другой - пильный орган, снабженный зажимом для пня дерева. 2.Трелевочная каретка по п. 1, о т л и чающаяся тем, что часть корпуса каретки с пильным органом выполнена с фиксатором положения частей каретки и захватов.
