(54) ПРИВОД ДЛЯ УПРАВЛЕНИЯ ПОДЪЕМОМ И ОПУСКАНИЕМ ТОКОПРИЕМНИКА
coenjric i-TTrvi черсл кингмятическ)то систему с под7 емными пружинами lOKonpneMHUKa, дополнен ломающимся рычагом, вьшолне шым в виде шарнирного подпружиненного двухзвенника, удеряшваемого в рабочем положении сердечником электромагнита, один конец которого жестко связан с рабочим валом редуктора, а второй входит в зацепление с храповым зубом барабана, при этом кинематическая система снабжена гидравлическим амортизатором, который укреплен неподвижно и шток которого серьгой соединен с подъемными пружинами токоприемника и гибкой связью с барабаном.
Для регулирования скорости опускания токоприемника гидравлический амортизатор снабжен перепускным вентилем.
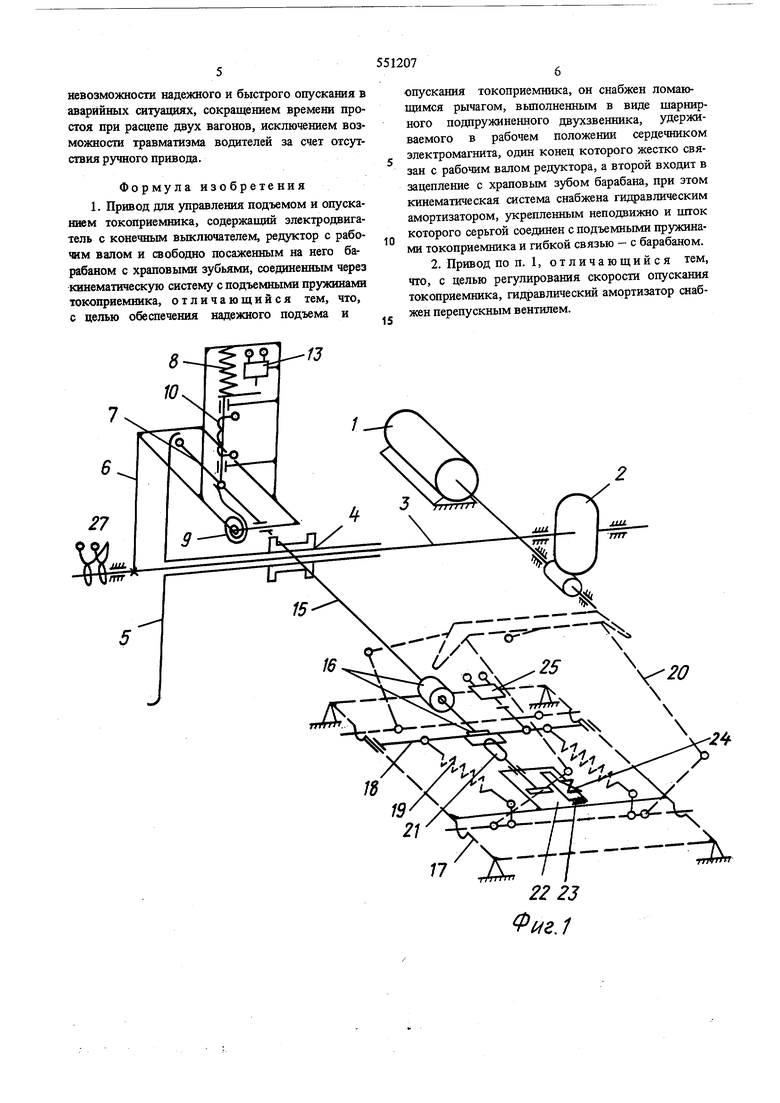
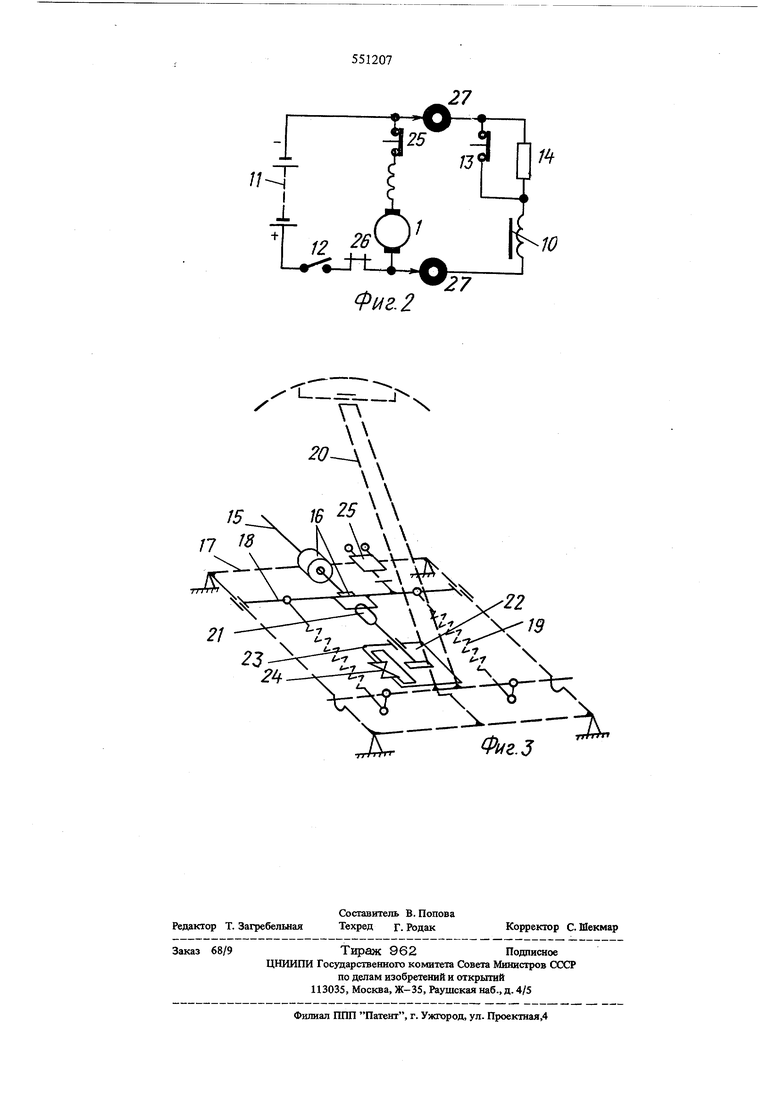
На фиг. 1 изображена кинематическая схема привода для токоприемника пентографного типа; на фиг. 2 - электрическая схема привода; на фиг. 3 - кинематическая схема установки привода на токоприемник штангового типа.
Привод содержит электродвигатель 1, вал которого соединен с червячным ред тстором 2. На рабочем вале 3 червячного колеса свободно насажен барабан 4, имеюший храповые зубья 5. На конце рабочего вала 3 жестко насажена несущая плита 6 с шарнирным двухзвенником, входящим в храповой зуб 5. На средний шарнир шарнирного двухзвенника 7 с внешней стороны действует пружина 8, а со стороны вала - пружина 9. Пружину 8 сжимает электромагнит 10. Напряжение к электромагниту 10 подводится от источника питания 11 с помощью тумблера 12 через конечный выключатель 13, соединенный электрически с ограничивающим резистором 14. На барабане 4 закреплен трос 15, проходящий через изоляторы 16 основания 17 токоприемника и коромысла 18 и прикрепленный неподвижно к последнему. Коромысло 18 шарнирно соединено с подъемными пружинами 19 токоприемника 20 и через серьгу 21с овальным отверстием - с гидравлическим амортизатором 22, имеющим трубку 23 с вентилем 24. При полностью натянутых подъемных пружинах 19 коромысло 18 приводит в действие конечньш выключатель 25. Привод подключен к источнику питания 11 через тумблер 12, блокировочный контакт 26, а питание к злектромагннту 10 подводится с помощью контактных колец 27.
Работает привод следующим образом.
Подъем токоприемника 20 начинается после замыкания тумблера 12 Подъем, одновременно подается напряжение на электродвигатель 1 привода и на электромагнит 10. В это время вращающий момент от электродвигателя 1 передается на червячный редуктор 2 и рабочий вал 3. Электромагнит 10, получая питание, сжимает пружину 8 и конечный выключатель 13, который, срабатьшая, переключает электромагнит 10 через ограничиваюпдай резистор 14. Напряжение на электромагните 10 поддерживается постоянным во время всей работы токоприемшжа 20 через контактные кольца 27. В это время пружина 9 возвращает шарнирный двухзвенник 7 в рабочее положение. Барабан 4, вращаясь, наматьшает трос 15 и начинает растяпшать подъемные пружины 19 токоприемника 20, Усилия, возникающие в подъемных пружинах 19, передаются через кривошипы валам токоприемника 20 и вызывают подъем последнего. Остановка привода происходит при достижении токоприемником 20 требуемого статического нажатия, которое регулируется местом установки конечного вьпслючателя 25 на основании 17. Срабатьтая, конечный выключатель 25 отключает питание электродвигателя. Скорость подъема токоприемника 20 задается (регулируется) числом оборотов электродвигателя 1 путем включения сопротивления в обмотку возбуждения.
Опускание токоприемника 20 производит машинист (вагоновожатый), размыкая тумблер 12 и
снимая напряжение с электромагнита 10. Пружина 8 освобождается, пересиливает действие пружины 9 и вьюодит из мертвой точки шарнирный двухзвенник 7, которьш складьтается. Барабан 4 раскручивается и освобождает трос 15 подъемных пружин 19, которые, сжимаясь, позволяют токоприемнику 20 опускаться под действием собственного веса.
Вначале токоприемник 20 резко отрьтается от контактного провода на 200 мм за счет наличия
свободного хода, обеспечиваемого серьгой 21. Затем вступает в действие гидравлический амортизатор 22, который воспринимает на себя усилия, возникающие за счет неполного сжатия подъемных пружин 19, и гасит их при снижении токоприемннка 20 до опушенного положения. Скорость опускания задается вентилем 24, регулирующим сечение трубки 23, через которую происходит переток жидкости в гидравлическом амортизаторе 22. Для автоматического опускания токоприемника 20 в цепи
питания привода имеется блокировочньш контакт 26, размъцсающийся при срабатьшашш главного выключателя подвижного состава или исчезновении напряжения в контактной сети. Кроме этого, автоматическое опускание происходит при обрьше
троса 15, неисправности источника питания 11, подводящих проводов и электромагнита 10, что является дополнительным преимуществом.
Применение в качестве источника энергии электричества позволяет использовать изобретение
на подвижном составе, где отсутствует источник сжатого воздуха.
Использование в механизме расцепления натяжного устройства шарнирного двухзвенника и регулируемого гидравлического амортизатора позволяет получить привод, удовлетворяющий требования на токоприемники электроподвижного со става.
Экономическая эффективность привода определяется уменьшением расходов, связанных споломками токоприемников и контактной сети за счет
невозможности надежного и быстрого опускания в аварийных еттуациях, сокращением времени нростоя при расцепе двух вагонов, исключением возможности травматизма водителей за счет отсутствия ручного привода.
Формула изобретения 1. Привод для управления подъемом и опусканием токоприемника, содержащий электродвигатель с конечным вьпслючателем, редуктор с рабочим валом и свободно посаженным на него барабаном с храповыми зубьями, соединенным через кннематическ)гю систему с подъемными пружинами токоприемника, отличающийся тем, что, с целью обеспечения надежного подъема и
опускания токоприемника, он снабжен ломающимся рычагом, вьшолненным в виде шарнирного подпружиненного двухзвенника, удерживаемого в рабочем положении сердечником электромагнита, один конец которого жестко связан с рабочим валом редуктора, а второй входит в зацепление с храповым зубом барабана, при этом кинематическая система снабжена гидравлическим амортизатором, укрепленным неподвижно и шток которого серьгой соединен с подъемными пружинами токоприемника и гибкой связью - с барабаном. 2. Привод по п. 1, отличающийся тем, что, с целью регулирования скорости опускания токоприемника, гидравлический амортизатор снабжен перепускным вентилем. / / 4ll4lf f
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического улавливания и опускания штанги токоприемника троллейбуса | 1973 |
|
SU600003A1 |
| Устройство для автоматического улавливания токоприемных штанг троллейбуса | 1976 |
|
SU672075A1 |
| Предохранительное устройство для круглопильного станка | 1981 |
|
SU1046091A2 |
| АВТОМАТ ДЛЯ ПРОДАЖИ ШТУЧНЫХ ТОВАРОВ | 1967 |
|
SU215636A1 |
| Устройство для вращения барабана подъемных ворот | 1983 |
|
SU1142613A1 |
| Устройство для вращения барабана подъемных ворот | 1979 |
|
SU937701A1 |
| Одновальная многобарабанная лебедка | 1989 |
|
SU1682295A2 |
| Устройство для дробления материалов | 1982 |
|
SU1085627A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЙИЗ ИСКУССТВЕННОЙ КОЖИ И НАТУРАЛЬНЫХ МАТЕРИАЛОВС ТЕРМОПЛАСТИЧЕСКОЙ ПРОСЛОЙКОЙ | 1971 |
|
SU424728A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ МИШЕННАЯ УСТАНОВКА | 1956 |
|
SU108058A1 |
21
.5
