(54) КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-шагающий движитель транспортного средства | 1981 |
|
SU1000336A1 |
| Колесно-шагающий движитель | 1976 |
|
SU650877A1 |
| Колесно-шагающий движитель | 1980 |
|
SU874445A1 |
| Колесно-шагающий движитель | 1980 |
|
SU921936A1 |
| Колесно-шагающий движитель | 1979 |
|
SU887340A2 |
| Колесно-шагающий движитель | 1977 |
|
SU679465A1 |
| Колесно-шагающий движитель | 1980 |
|
SU948742A2 |
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| Устройство для обеспечения движения транспортного средства в колесно-шагающем режиме | 1977 |
|
SU659446A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
1
Изобретение относится к транспортному машиностроению, в частности к конструкциям движителей транспортных средств высокой проходимости.
Известен колесно-шагающий движитель, содержащий два равноплечих шарнирно-. соединенных рычага, первый из которых своим свободным концом шарнирно связан с корпусом транспортного средства, второй - со ступицей колеса, тяговый редуктор, расположенный в рычагах подвески, и механизм блокировки, состоящий из червячной пары, снабженной командным электродвигателем 1.
Недостатком этого движителя является наличие дифференциальной связи между рычагами и колесами на этапе переноса корпуса, что при неблагоприятном соотношении внешних сил, действующих на колесо, может вызвать его откат.
Указанный недостаток устранен в другом известном колесно-шагающем движителе, у которого блокирующий механизм выполнен в виде трехзвенного планетарного механизма, снабженного двумя управляемыми тормозами, а одно из выходных звеньев этого механизма соединено посредством дополнительного редуктора с первым рычагом 2.
В этом движителе неподвижность колеса на этапе переноса корпуса обеспечивается жесткой кинематической связью элементов привода. Однако этот движитель имеет тот недостаток, что часть тягового редуктора, расположенная в первом и втором рычагах, может быть выполнена только в
,(j виде рядного редуктора, что является неоптимальным как с точки зрения габаритов и веса редуктора, так и с позиций совместной компоновки привода, механизма шагания и колеса.
Наиболее близким к предлагаемому по
15 технической сущности и достигаемому результату является колесно-шагающий движитель, содержащий два щарнйрно-сочлененных рычага, первый из которых шарнирно соединен с корпусом транспортного
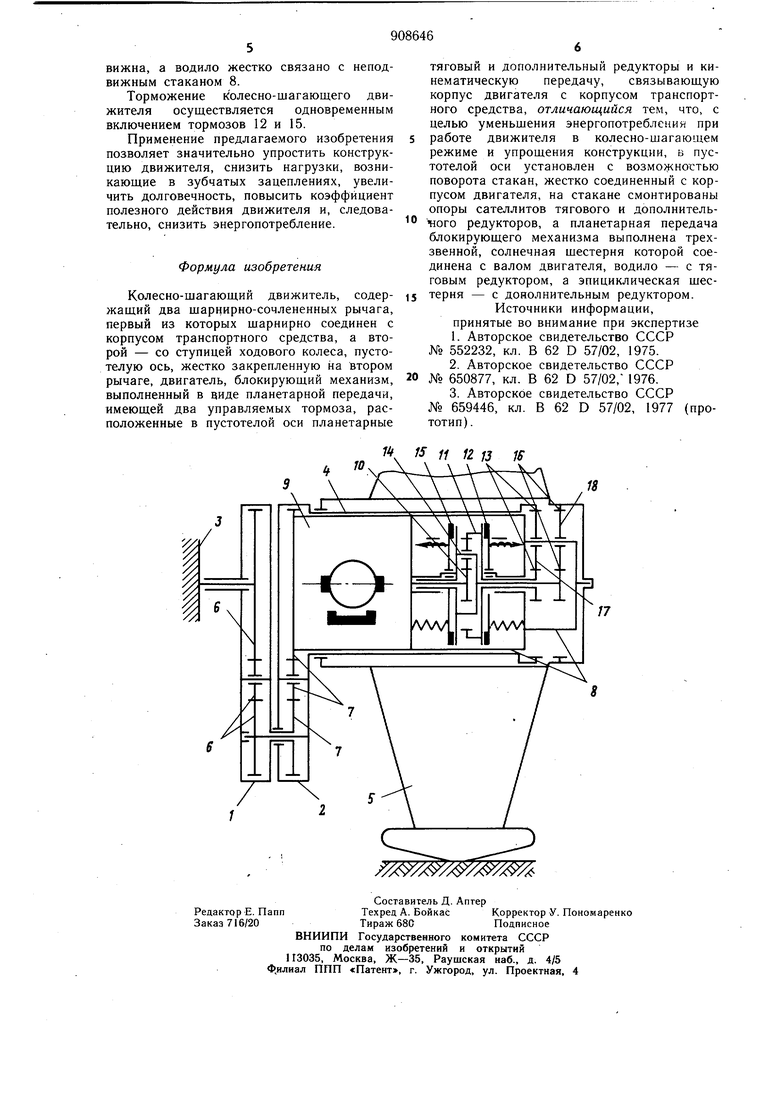
2Q средства, а второй - со ступицей ходового колеса, пустотелую ось, жестко закрепленную на втором рычаге, двигатель, блокирующий механизмы, выполненный в виде планетарной передачи, имеющей два управляемых тормоза, расположенные в пустотелой оси планетарные, тяговый и дополнительный редукторы, и кинематическую передачу, связывающую корпус двигателя с корпусом транспортного средства 3. Недостатки данного движителя заключаются Б TOivrr что наличие блокирующего механизма, ыполненного в виде четырехзвенной планетарной передачи, приводит к усложнению конструкции, а наличие контура циркуляции мощности при работе движителя в колесно-щагающем режиме, включает в себя звенья блокирующего механизма, тягового и дополнительного редукторов и кинематической связью последних через пустотелую ось второго рычага, приводит к увеличению нагрузок в зубчатых зацеплениях, снижению коэффициента полезного действия движителя и, следовательно, к увеличению энергопотребления. Цель изобретения - уменьщение энергопотребления при работе движителя в колесно-шагающем режиме и упрощение конструкции. Поставленная цель достигается тем, что в пустотелой оси установлен с возможностью поворота стакан, жестко соединенный с корпусом двигателя, на стакане смонтированы опоры сателлитов тягового и дополнительного редукторов, а планетарная передача блокирующего механизма выполнена трехзвенной, солнечная шестерня которой соединена с валом двигателя, водило с тяговым редуктором, а эпициклическая щестерня - с дополнительным редуктором. На чертеже представлена кинематическая схема предлагаемого колесно-шагающего движителя. Движитель состоит из двух щарнирносоединенных рычагов 1 и 2. Первый рычаг 1 свободным концом установлен Ц1арнирно на корпусе 3 транспортного средства. На конце второго рычага 2 закреплена пустотелая ось 4, которая установлена шарнирно в ступице ходового колеса 5. Рычаги 1 и 2 кинематически связаны между собой с помощью редуктора 6 с передаточным отношением 0,5. Рычаг 1 с помощью редуктора 7 с передаточным отношением, равным двум, связан со стаканом 8, установленным шарнирно в оси 4 и соединенным с корпусом тягового двигателя 9. Вместе редукторы 6 и 7 представляют собой кинематическую передачу, связывающую корпус двигателя с корпусом транспортного средства. Выходной вал двигателя 9 соединен с солнечной шестерней 10 блокирующего механизма. Эпициклическая шестерня 11 блокирующего механизма, снабженная управляемым электромагнитным тормозом 12, соединена через дополнительный редуктор 13 с пустотелой осью 4 рычага 2. Водило 14 блокирующего механизма снабжено управляемым электромагнитным тормозом 15 и соединено через тяговый редуктор 16 со ступицей колеса 5. Дополнительный редуктор 13 и тяговый редуктор 16 выполнены в виде планетарных передач, причем опоры сателлитов 17 и 18 этих передрч смонтированы на стакане 8. Колесно-щагающий движитель работает следующим образом. При работе в колесном режиме включен тормоз 12 эпициклической шестерни 11, при этом последний соединяется со стаканом 8. При включении двигателя 9 вся мощность через блокирующий механизм и тяговый редуктор 16 передается на ходовое колесо 5. Тормоз 15 при этом включен. Реактивный момент, возникающий от редукции в тяговом редукторе и блокирующем механизме, передается на стакан 8, а затем на корпус транспортного средства, так как при передаточном отношении редуктора 7, равном двум, и редуктора 6, равном 0,5, стакан 8 и связанный с ним корпус двигателя 9 связан с корпусом 3 транспортного средства плоскопараллельно. В колесном режиме рычаг 2 не вращается, так как он оказывается связан со стаканом 8. Для выноса колеса при работе движителя в колесно-щагающем режиме включаются оба тормоза 12 и 15. При этом между эпициклической шестерней 11 и водилом 14 блокирующего механизма, а следовательно и между соединенными с этими звеньями рычагом 2 и колесом 5, устанавливается дифференциальная связь так, что вращается и второй рычаг, и колесо 5. Колесо 5 перемещается как ведущее от его момента, и как толкаемое от силы на конце второго рычага, причем чем больше сила сопротивления качению колеса, тем больще момент на колесе и тем больше толкающая сила. При вращении рычага 2 благодаря кинематическим связям редуктора 6 и тому, что плечи рычагов 1 и 2 равны, ось колеса соверщает прямолинейное перемещение относительно корпуса транспортного средства. Для выноса корпуса при работе двнжителя в колесно-шагающем режиме тормоз 12 выключается, а тормоз 15 включается. Водило 14 блокирующего механизма и, следовательно, солнечная щестерня тягового редуктора 16 оказывается соединенным с неподвижным стаканом 8. Вся мощность двигателя 9 через блокирующий механизм .и дополнительный редуктор 13 передается на вращение рычагов, что вызывает перемещение корпуса 3 транспортного средства относительно оси колеса 5; При этом колесо остается неподвижным, так как оно соединено с- эпициклом планетарного тягового дедуктора 16, солнечная шестерня которого при включенном тормозе 15 непод
