екта у.ь и 6i, поступают в вычислительный по luiioie 15 исходных даагных. Р1эвест1пы формулы пересчета исходпг тх данных Обье1кта наблюдения из экваториальной системы коордипат н азимутальную Систему координат icosZ sincp sin6 + cosq-.cosfi cos/; (Озб Н tg/l Cosj Cos6 Sintp - Sin6 Co, Cos/ Cos6 Sin(f - Siiifi Cosif sinZ Cos,4 sin/ Coscp cosP ще cc - координата прямого восхождения объекта (НЭблюдйНИя; б - .координата .склонения объекта .наблюдения; ср - широта места установки телескопа; А - объекта наблюдения; Z - зенитное расстояние объекта наблюдения; Р - параллактический угол; / - ча.совой угол. Для малых пр 1ращеннй Лес, Дб, А/4, AZ справедливы формулы, то:4:иость которых обратно протюрцпональна величинам , AZ. AS АЛ sinZsinP - AZcosP;(6) , /1 SinZ Cos я -- Zsii; Р Да - Вычислительный блок 14 рассчитывает следуюндие значения опорпых точек для (( + 1)-го мар.кера .времени а а,, -f S АСУ.;; 5 б„- S Л6;: А Z arceosZ,(11) лтричем IB формллах (1-5) значение t берется для (i+l) Мара :ера времени. В нро межутгках времени между маркерам и вычислительный блок 14 производит экстраноляцию рассчитанных значений Л и Z. Рассмотрим работу устрой:ства. На ВХОД вычислительного блока 14 .вводятся исходные данные наблюдаемого объекта а, и б . До тех нор, пока onespaTop не 1про изводит кор оекциИ положения телескона, .исходные данные пересч итываются по приведенным формулам в зн ачення Л и Z, которые, ноступая через сум маторы 10. отрабатываются цифравьими следящими привода.и в углы поворота телескопа по осям .4 и Z. Допустим, после (t+l)-ro маркера времени операто) начинает полуавтоматически хи)ректиро1вать по.тожеиие телескопа, наж имая Клавиши ручной коррекции. При этом импульсы, постуиающ.ие от теиератора 8 на .д гложе1ния 5 выч итания 6 1СчетчИKOii 7. фарми|зуют изменяющимися с теченнв.м iipcMOiiH код. Этот код. складываясь на входе су; 1матора 10, нриводит к то.му, что па основНое движепИе телескопа, обяза нное координагам я,, и б„, накладывается коррекциондюе .движение с заданиы м знак.ом. По приходе j-ro маркера времени срабатывают схемы «И, код со счетчиков 7 наступает на вход вычислительного блока, записывается также в регистры 11, а счетч. носле этого обнуляются. Вычис.лительный блак таким образом после прихода г-го -маркера рассчитывает по данным АЛ,., AZ, а , , б j, па время t, равное (г+1) моменту -времени значения и Z/-,-i . Этот процесс длятся в течение времени между г-м и (t+l)-M момвнта)ми времени. В этот же промел- уток времени на вход .сум1маторов 10 поступает код счетчика 7, накопленный после t-ro мо1мента времени, коде регистра 11, 15авный величине коррекции за -период с (г-1)-го до г--го момента времени, и с вычислтггелыюго блока - экстраполированные значения соответствен-но координат А и Z. По приходе (i+l)-ro маркера на выход иычп-слительното блока 14 поступают значения Л и Z с учетом величины коррекции за время меж-ду (г+1)-м и f-м моментами времеп-и, а эта величина в регистрах 11 стипается. Остальное происходит аналогично оиисанном-у вьапе процессу для г-го маркера. Та.ким o6ipa3o.M, аператор как бы ведет .кор-рбкц-ию только по Л и Z в течение времени 2А/ , где А; есть про межуток времени между последовательно приходящими маркерами, а -пакоррактированные (величины за предыдущее в/ремя уже присутствуют нере-считанными в а и б. Тем са-мьш, несмотря на оп.(И|б,К1И, в-н-оошмые за счет 1неточн-ости формул (6) и (7). опер-атор. наблюдая на видеоконтрольном устройстве процесс коррекционпого дви ;сеи-ия, -корре-ктир-ует положение -телескопа с учетом нал1гчия и этих по;грешностей. По окончании процесса ручной коррекции нако рректирова-нные значения хранятся в вычисл-ительном блоке в виде Of;00 2 Асс; и S Аб,- , 11 -р е д м е т и 3 о б р е т е -н и я Устройство для нолуавтоматичеокой кор эекции -положения ази-мутального телвско-па, содержащее вычислительный -блок, шину временных Н1мнульсо1в, но-дключенную к о-дному из его входов, шину исходных данных, подключенную к другому входу, два блока уп.равлбиия, каждый из которых содержит клавишу ручной коррекции и цифровой следящий пр.ивод, выходной вал которого связан с телеокопом, отличающееся тем, что, с целью повышения бы1стродейст1вия устройства, оно содержит генератор имлульсов, выход которого свяваи с клавиша-ми ручной коррекции, в каждом из блоков удравдевия - иоследовательно соединенные Счетчик ,им1пульсов и сумматор, выход которого овяза« со входо-м
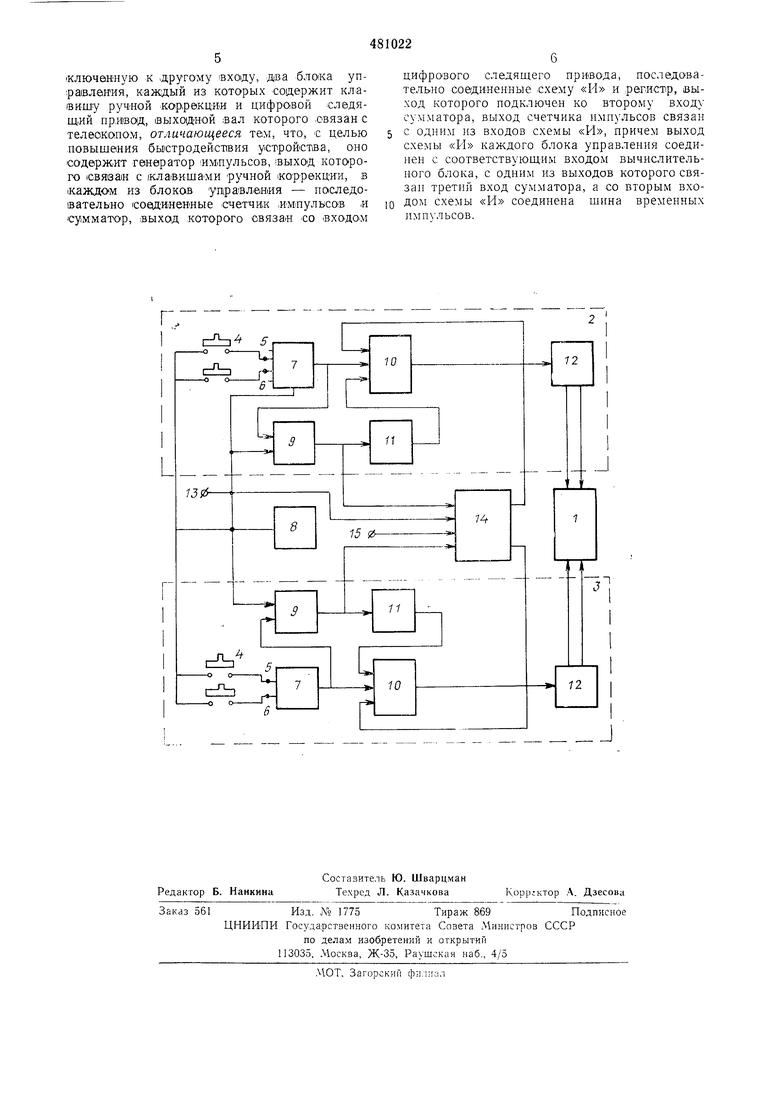
цифрового следящего привода, последовательно соединенные схему «И и регистр, выход которого подключен ко второму входу сумматора, выход счетчика импульсов связан
с одним из входов схемы «И, причем выход схемы «И каждого блока управления соединен с соответствующим входом вычислительного блока, с одним из выходов которого связан третий вход сумматора, а со вторым входом схемы «И соединена шина временных импхмьсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления телескопом | 1974 |
|
SU511559A1 |
| Устройство для управления телескопом на альтазимутальной монтиолвке | 1974 |
|
SU510691A1 |
| Устройство для управления наведением телескопа | 1974 |
|
SU560213A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |
| Система управления телескопом | 1986 |
|
SU1390600A1 |
| Устройство для полуавтоматической коррекции положения телескопа | 1974 |
|
SU601668A1 |
| Телескоп | 1983 |
|
SU1108379A1 |
| Преобразователь угол-код | 1983 |
|
SU1126988A1 |
| Устройство для управления положением телескопа | 1975 |
|
SU552592A1 |
| Система управления телескопом | 1979 |
|
SU826273A1 |
