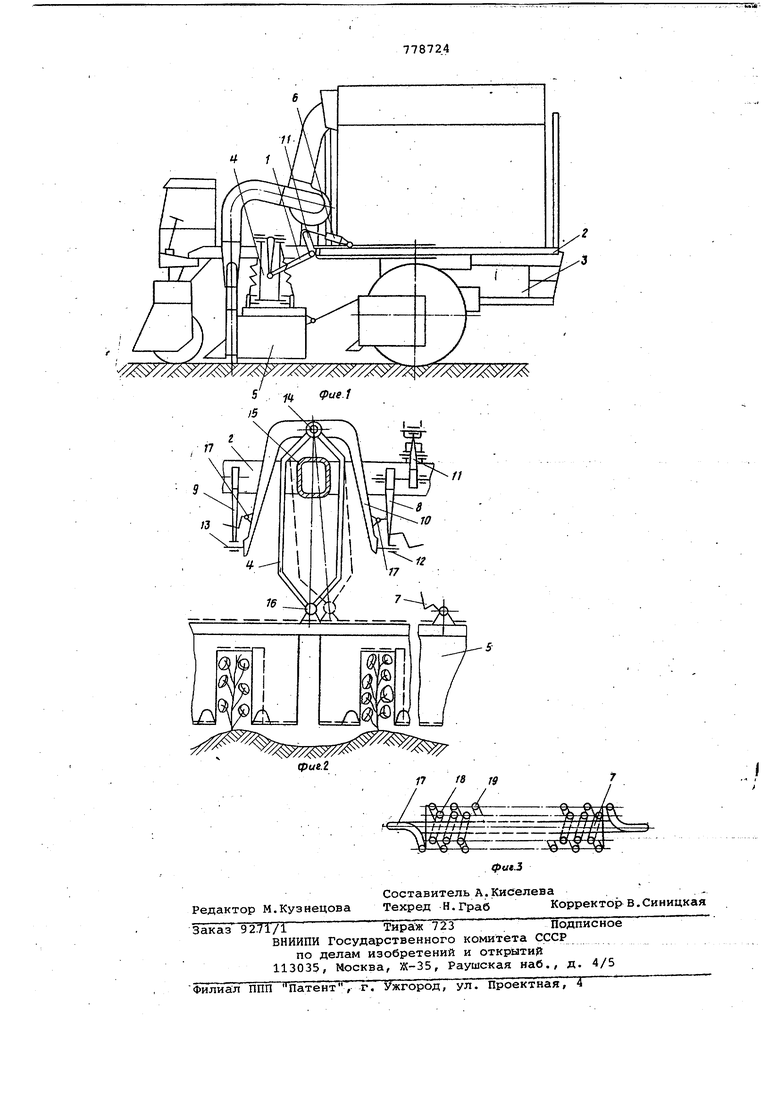
Таким образом, ось шарнира 14 и оси шарниров 12 и 13 расположены во вэаимйо перпендикулярных йлУбскЬстях Стабилизаторы 7 положе;Нйй аппара дв расположены Симметрично jDTHocHr тельно продольной оси аппаратов, кр пятся верхними концами 17 к рычагу .10 и нижними к блоку аппаратов 5 и состоят из двух цилиндрических пруЖйн, вставленныходна в другую. Внутренняя пружина 18 работает на сжатие, а наружная пружина 19 - на растяжение. Работает устройство следующим образом. Положение аппаратов 5 относительно кустов хлопчатника в ОСНОВНОМ обусловлено положением рамы 2 хлопкоуборочной машины, которая в процес се сбора совершает пространственные колебания (отклоняется от курса, крепится и т. д.). При всех этих погрешностях в положениях рамы 2 машины относительно кустов хлопчатника аппараты 5 сохраняют свое стабильное положение в работе, не нарушая и формального протекания тех .нологического процесса сбора хлопка Колебания и отклонения рамы 2 не передаются аппарату 5, так как после ний педвёшен тсодвйжно на двухизарнирном поводке 4, как маятник, Поводок 4 подвеса позволяет смещаться аппара там 5 относительно рамы 2как в поперечном, так и угловом (ё поперечной вертикальной плоскости) направле нии относительно нижнего 16 или верх него 14 шарнира подвеса. Удерживают на курсе аппарат 5 и задают ему неоёхбдймбё положение сами кусты, реакция грядок и силы инерции аппаратов . Причем чувствительнесть подвес ки аппаратов 5 к пространственным Колебаниям и смещениям рамы 2 обусловлена длиной поводка 4 подвеса. Чем длиннее поводок 4, тем большечувствительность механизма. Стабилизаторы 7 служат длЖ гашения колебани аппаратов 5, и задают им необходимое равновесное положение в работе. в данном устройстве стабилизаторы 7 служат также в роли ограничителей предельного перемещения аппаратов, j которые могут привести к разъединейию телескопического соединения трубопроводов системы, пневмотранспорта. Предельно допустимые перемещения аппаратов задаются путем регулирования хода стабилизаторов. Перемещение аппаратов 5 прекращается при полном сжатии внутренней пружины, когда смыкаются ее витки. Подвеска аппаратов посредством рычага 10 позволяет удлинить поводок 4 подвеса и повысить чувствительность механизма. Расположение оси крепления поводка 4 к рычагу 10 и осей крепления . самого рычага 10 к сблокированным рычагам 1 качалок во взаимно перпендикулярных плоскостях позволяет упростить подвеску аппаратов путем исключения дополнительных креплений 15ычага 10 с целью придания ему устойчивости. Формула изобретения Механизм навески аппаратов многорядной хлопкоуборочной машины, содержащий систему несущих рычагов, связанных с одной стороны с рамой машины и гидроцилиндрами подъема, а с другой при помощи двухшарнирнос аппаратами, и стаби/го поводка лизаторы положения последних. о т л и ч а ю щ и и с я тем, что, с целью повыщения чувствительности механизма навески к горизонтальным отклонениям машины, он снабжен П-образным рычагом, концы которого соединены с несущими рычагами, а середина его поперечины - с верхним шарниром поводка. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 553957, кл. А 01 D 45/18, 1975,

| название | год | авторы | номер документа |
|---|---|---|---|
| Многорядная хлопкоуборочная машина | 1975 |
|
SU553957A1 |
| Механизм навески блока аппаратовХлОпКОубОРОчНОй МАшиНы | 1979 |
|
SU820717A1 |
| Многорядная хлопкоуборочная машина | 1986 |
|
SU1407418A1 |
| УСТРОЙСТВО для НАВЕСКИ ХЛОПКОУБОРОЧНОГО АППАРАТАНА РАМУ .\\АШИНЫ | 1969 |
|
SU256419A1 |
| Механизм подвески вертикально- шпиНдЕльНОгО ХлОпКОубОРОчНОгОАппАРАТА | 1979 |
|
SU826990A1 |
| Механизм подвески аппаратов многорядной уборочной машины | 1977 |
|
SU743623A1 |
| Устройство для блоков навески аппаратов уборочной машины | 1989 |
|
SU1657096A1 |
| Механизм подвески аппаратов многорядной хлопкоуборочной машины | 1976 |
|
SU649359A1 |
| Универсальный самоходный хлопкоуборочный комбайн | 1991 |
|
SU1819527A1 |
| КРУГЛИЛЬНО-КАШИРОВАЛЬНАЯ МАШИНА БЕЗВЫСТОЙНОГО ТИПА( | 1973 |
|
SU369023A1 |