(54) МЕХАНИЗМ НАВЕСКИ БЛОКА АППАРАТОВ ХЛОПКОУБОРОЧНОЙ МАШИНЫ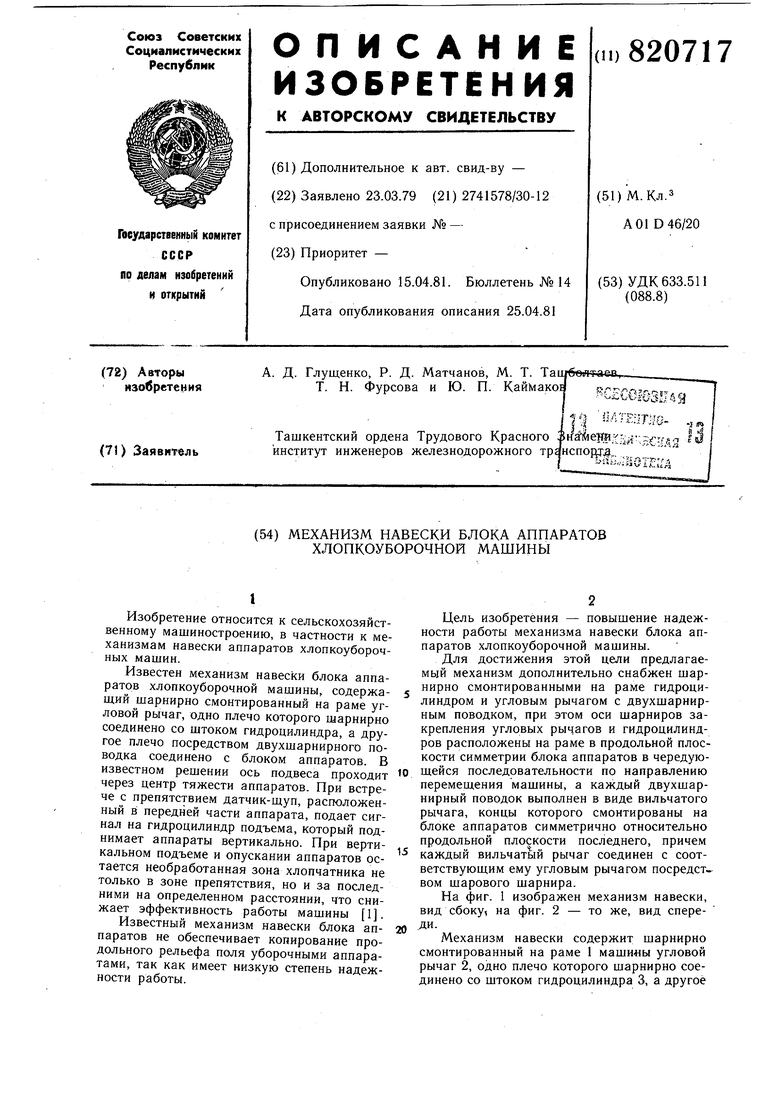
| название | год | авторы | номер документа |
|---|---|---|---|
| Многорядная хлопкоуборочная машина | 1975 |
|
SU553957A1 |
| Механизм навески аппаратов хлопкоуборочной машины | 1979 |
|
SU908270A1 |
| Механизм навески аппаратов хлопкоуборочной машины | 1981 |
|
SU1028272A2 |
| Механизм навески блока аппаратов хлопкоуборочной машины | 1979 |
|
SU919630A1 |
| Механизм навески блока аппаратовХлОпКОубОРОчНОй МАшиНы | 1979 |
|
SU799686A1 |
| Механизм подвески аппаратов многорядной уборочной машины | 1975 |
|
SU572240A1 |
| Многорядная хлопкоуборочная машина | 1986 |
|
SU1407418A1 |
| Устройство для блоков навески аппаратов уборочной машины | 1989 |
|
SU1657096A1 |
| Механизм подвески вертикально- шпиНдЕльНОгО ХлОпКОубОРОчНОгОАппАРАТА | 1979 |
|
SU826990A1 |
| Механизм навески аппаратов многорядной хлопкоуборочной машины | 1978 |
|
SU778724A1 |
1
Изобретение относится к сельскохозяйственному машиностроению, в частности к механизмам навески аппаратов хлопкоуборочных машин.
Известен механизм навески блока аппаратов хлопкоуборочной машины, содержаший шарнирно смонтированный на раме угловой рычаг, одно плечо которого шарнирно соединено со штоком гидроцилиндра, а другое плечо посредством двухшарнирного поводка соединено с блоком аппаратов. В известном решении ось подвеса проходит через центр тяжести аппаратов. При встрече с препятствием датчик-щуп, расположенный в передней части аппарата, подает сигнал на гидроцилиндр подъема, который поднимает аппараты вертикально. При вертикальном подъеме и опускании аппаратов остается необработанная зона хлопчатника не только в зоне препятствия, но и за последними на определенном расстоянии, что снижает эффективность работы машины 1.
Известный механизм навески блока аппаратов не обеспечивает копирование продольного рельефа поля уборочными аппаратами, так как имеет низкую степень надежности работы.
Цель изобретения - повышение надежности работы механизма навески блока аппаратов хлопкоуборочной машины.
Для достижения этой цели предлагаемый механизм дополнительно снабжен шарнирно смонтированными на раме гидроцилиндром и угловым рычагом с двухшарнирным поводком, при этом оси шарниров закрепления угловых рычагов и гидроцилиндров расположены на раме в продольной плоскости симметрии блока аппаратов в чередующейся последовательности по направлению перемещения машины, а каждый двухшарнирный поводок выполнен в виде вильчатого рычага, концы которого смонтированы на блоке аппаратов симметрично относительно продольной плоскости последнего, причем каждый вильчатьш рычаг соединен с соответствующим ему угловым рычагом посредст. вом шарового шарнира.
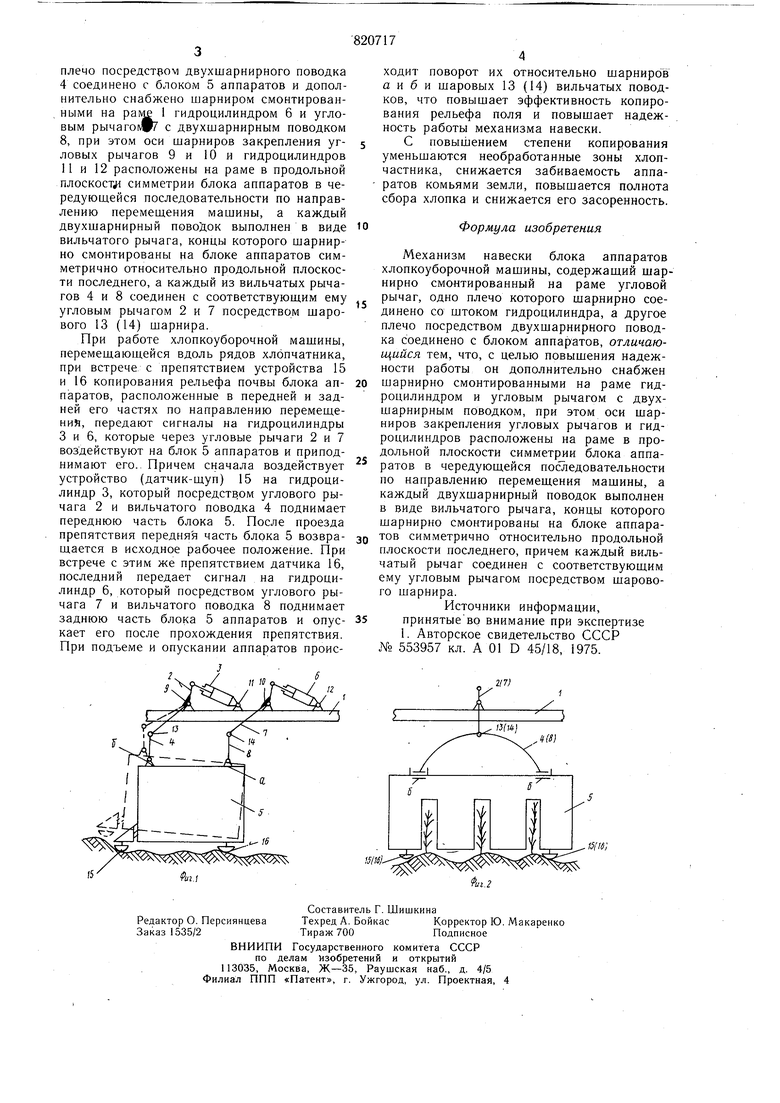
На фиг. 1 изображен механизм навески, вид сбоку, на фиг. 2 - то же, вид спереди.
Механизм навески содержит шарнирно смонтированный на раме 1 машины угловой рычаг 2, одно плечо которого шарнирно соединено со штоком гидроцилиндра 3, а другое
плечо посредством двухшарнирного поводка 4 соединено с блоком 5 аппаратов и дополнительно снабжено шарниром смонтированными на гидроцилиндром 6 и угловым рычаго ф7 с двухшарнирным поводком 8, при этом оси шарниров закрепления угловых рычагов 9 и 10 и гидроцилиндров 11 и 12 расположены на раме в продольной плоскост 1 симметрии блока аппаратов в чередуюшейся последовательности по направлению перемещения машины, а каждый двухшарнирный повоДок выполнен в виде вильчатого рычага, концы которого шарнирно смонтированы на блоке аппаратов симметрично относительно продольной плоскости последнего, а каждый из вильчатых рычагов 4 и 8 соединен с соответствующим ему угловым рычагом 2 и 7 посредством щарового 13 (14) шарнира.
При работе хлопкоуборочной мащины, перемещающейся вдоль рядов хлопчатника, при встрече с препятствием устройства 15 и 16 копирования рельефа почвы блока аппаратов, расположенные в передней и задней его частях по направлению перемещения, передают сигналы на гидроцилиндры 3 и 6, которые через угловые рычаги 2 и 7 воздействуют на блок 5 аппаратов и приподнимают его.. Причем сначала воздействует устройство (датчик-щуп) 15 на гидроцилиндр 3, который посредством углового рычага 2 и вильчатого поводка 4 поднимает переднюю часть блока 5. После проезда препятствия передняя часть блока 5 возвращается в исходное рабочее положение. При встрече с этим же препятствием датчика 16, последний передает сигнал на гидроцилиндр 6, который посредством углового рычага 7 и вильчатого поводка 8 поднимает заднюю часть блока 5 аппаратов и опускает его после прохождения препятствия. При подъеме и опускании аппаратов проис
/( W
/
Г
ХОДИТ поворот их относительно шарниров а и б и шаровых 13 (14) вильчатых поводков, что повышает эффективность копирования рельефа поля и повышает надежность работы механизма навески.
С повьилением степени копирования уменьшаются необработанные зоны хлопчастника, снижается забиваемость аппаратов комьями земли, повыщается полнота сбора хлопка и снижается его засоренность.
Формула изобретения
Механизм навески блока аппаратов хлопкоуборочной машины, содержащий шарнирно смонтированный на раме угловой рычаг, одно плечо которого шарнирно соединено со щтоком гидроцилиндра, а другое плечо посредством двухщарнирного поводка соединено с блоком аппаратов, отличающийся тем, что, с целью повыщения надежности работы он дополнительно снабжен шарнирно смонтированными на раме гидроцилиндром и угловым рычагом с двухшарнирным поводком, при этом оси шарниров закрепления угловых рычагов и гидроцилиндров расположены на раме в продольной плоскости симметрии блока аппаратов в чередующейся последовательности по направлению перемещения мащины, а каждый двухшарнирный поводок выполнен в виде вильчатого рычага, концы которого шарнирно смонтированы на блоке аппараQ тов симметрично относительно продольной плоскости последнего, причем каждый вильчатый рычаг соединен с соответствующим ему угловым рычагом посредством щарового шарнира.
Источники информации, принятыево внимание при экспертизе 1. Авторское свидетельство СССР № 553957 кл. А 01 D 45/18, 1975.
