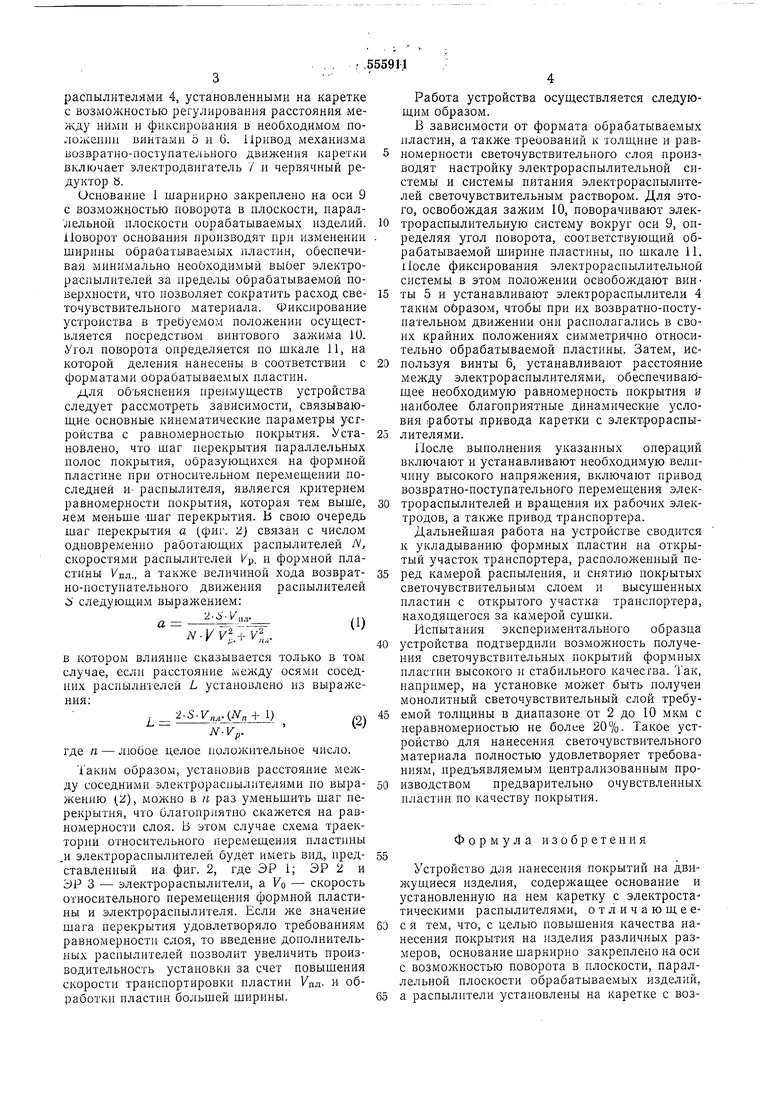
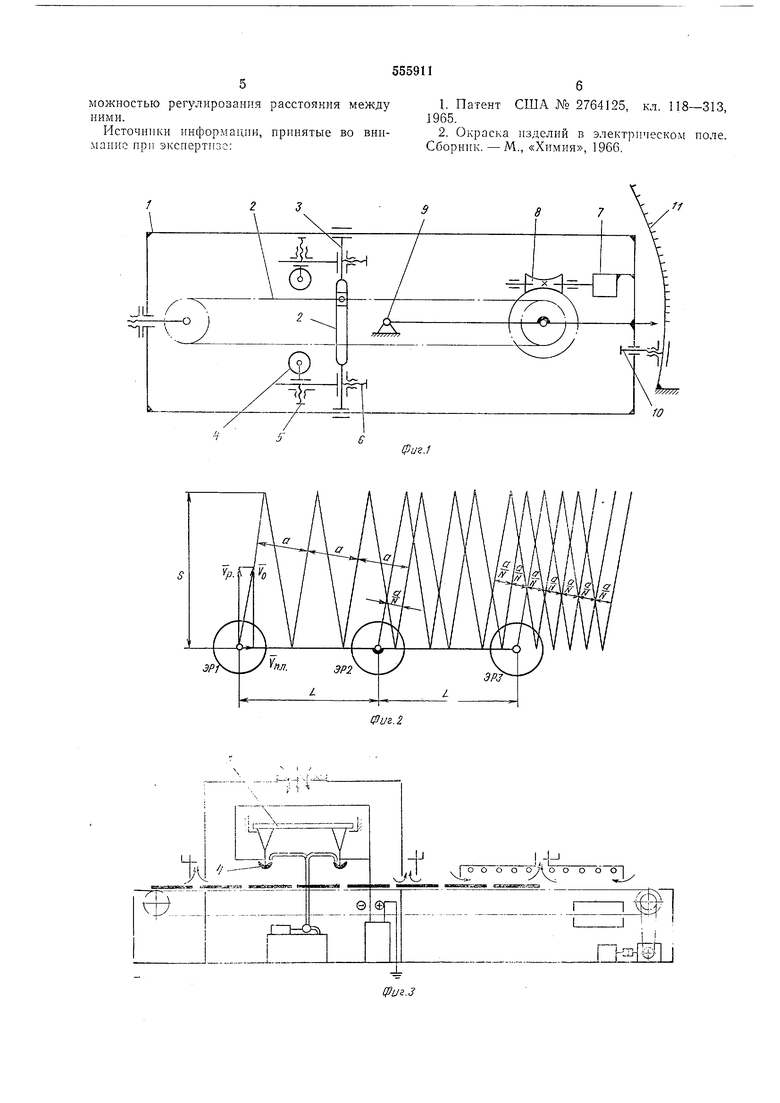
распылителями 4, установленными на каретке с возможностью регулирования расстояния между ними и фиксирования в необходимом положении винтами о и 6. Привод механизма возвратно-nocTynaTejibHoro движения каретки включает электродвигатель 7 и червячный редуктор Ь. Основание 1 шарнирно закреплено на оси 9 с возмолшостью иоворота в плоскости, параллельной плоскости оорабатываемых изделий. Поворот осиования ироизводят при изменении ширииы обрабатываемых иластии, обеспечивая минимально необходимый выбег электрораспылителей за иределы обрабатываемой поверхности, что позволяет сократить расход светочувствительного материала. Фиксирование устройства в требуемом положении осуществляется иосредством винтового зажима 10. Угол новорота оиределяется по шкале 11, на которой деления ианесепы в соответствии с форматами оорабатываемых пластии. для объяснения иреимуществ устройства следует рассмотреть зависимости, связывающие осиовные кинематические параметры усгройства с равномерностью покрытия. Установлено, что щаг перекрытия параллельных полос покрытия, образующихся на формной иластине нри отиосительиом перемещепии последней и- распылителя, являегся критерием равномерности покрытия, которая тем выше, нем меньще шаг перекрытия. В свою очередь щаг перекрытия а (фиг. 2} связан с числом одновременно работающих расиылителей Л , скоростями распылителей Vp. и формиой пластины 1/пл., а также величииой хода возвратио-постуиательиого движения расиылителей 5 следующим выражением: бМ/;.,.,. Kv.+vLв котором влияние сказывается только в том случае, если расстояние между осями соседних расиылителей L устаиовлеио из вырал :ения:2-8-У„.(М„+ 1) где п - любое целое положительное число. 1аким образом, устаиовив расстояиие между соседними электрораспылителями по выражению (2), можно в п раз уменьщить щаг иерекрытия, что благоприятно скажется на равиомерности слоя. Б этом случае схема траектории относительного перемещения иластипы .и электрорасиылителей будет иметь вид, представленный иа фиг. 2, где ЭР 1; ЭР 2 и ЭР 3 - электрораспылители, а Ко - скорость относительного иеремещения формиой пластины и электрорасиылителя. Если же значеиие шага перекрытия удовлетворяло требованиям равномерности слоя, то введение дополнительных распылителей позволит увеличить производительность установки за счет повыщения скорости траисиортировки пластии Удл- и обработки пластии больщей щнрины. Работа устройства осуществляется следующим образом. В зависимости от формата обрабатываемых пластин, а также требований к толщиие и равномерности светочувствительного слоя производят настройку электрораспылительиой системы и системы питания электрораспылителей светочувствительным раствором. Для этого, освобождая зажим 10, поворачивают электрораспылительиую систему вокруг оси 9, определяя угол иоворота, соответствующий обрабатываемой щириие пластины, по щкале 11. |1осле фиксирования электрорасиылительной системы в этом положеиии освобождают винты 5 и устаиавливают электрораспылители 4 таким образом, чтобы при их возвратно-поступательном движенни они располагались в своих крайиих положениях симметричио отиосительно обрабатываемой пластины. Затем, используя винты 6, устанавливают расстояние между электрораспылителями, обеспечивающее необходимую равномерность покрытия и наиболее благонриятные динамические условия работы привода каретки с электрораспылителями. Мосле выиолнения указаииых операций включают и устанавливают необходимую величину высокого наиряжения, включают иривод возвратно-поступательного перемещения электрораспылителей и вращения их рабочих электродов, а также привод траиспортера. Дальнейщая работа на устройстве сводится к укладываиию формных пластин иа открытый участок транспортера, расположенный перед камерой раснылепия, и снятию иокрытых светочувствительиым слоем и высущенных иластии с открытого участка транспортера, находящегося за камерой сущки. Испытания эксперимептального образца устройства подтвердили возможность получения светочувствительных покрытий формиых иластин высокого и стабильного качесгва. Так, напрпмер, на установке может быть получен монолитный светочувствительный слой требуемой толщины в диапазоне от 2 до 10 мкм с неравномерностью не более 20%. Такое устройство для нанесения светочувствительного материала полностью удовлетворяет требованиям, нредъявляемым централизованным производством предварительио очувствлеииых пластии по качеству покрытия. Формула изобретения Устройство для нанесения покрытий на движущиеся изделия, содержащее основание и установленную на нем каретку с электростатическими раснылителями, отличающеес я тем, что, с целью новыщения качества нанесения покрытия иа изделия различиых размеров, основаниешарнирно закреилено на оси с возможностью поворота в плоскости, параллельпой плоскости обрабатываемых изделий, а распылители установлены на каретке с воз
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЯ НА ПЛАСТИНЫ | 1970 |
|
SU264913A1 |
| Устройство для нанесения покрытия на пластины | 1978 |
|
SU776648A1 |
| Установка для нанесения покрытия на пластины | 1976 |
|
SU579030A2 |
| Светочувствительный состав | 1975 |
|
SU541138A1 |
| Устройство для нанесения покрытия на изделие | 1978 |
|
SU670342A1 |
| Пыленепроницаемая камера для нанесения покрытий | 1988 |
|
SU1616715A1 |
| СПОСОБ ГАЗОТЕРМИЧЕСКОГО НАПЫЛЕНИЯ ПОКРЫТИЙ НА ТЕЛА ВРАЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328352C1 |
| Автоматический станок для штамповки изделий из листового материала | 1949 |
|
SU84445A1 |
| Устройство для нанесения покрытий | 1979 |
|
SU825175A1 |
| Способ восстановления асфальтобетонного покрытия | 1978 |
|
SU712476A1 |
