(54) АНАЛОГО-ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Аналого-цифровая следящая система | 1988 |
|
SU1522152A1 |
| Цифроаналоговая система позиционирования | 1987 |
|
SU1500992A1 |
| Электрогидравлический следящий привод | 1988 |
|
SU1557370A1 |
| Следящая система | 1987 |
|
SU1631513A1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО | 2003 |
|
RU2269805C2 |
| Фотоэлектрический анализатор количества и размеров частиц | 1987 |
|
SU1518727A1 |
| Способ определения положения ротора шагового двигателя | 1988 |
|
SU1594672A1 |
| Цифровая следящая система комбинированного регулирования | 1972 |
|
SU442458A1 |
| Аналого-цифровой преобразователь | 1984 |
|
SU1455391A1 |
| Следящий аналого-цифровой преобразователь | 1989 |
|
SU1674371A1 |
1
Изобретение относится к области автоматического управления и может быть использовано для улучшения качества процесса регулирования следящих приводов моделирующих стендов.
Известны цифровые следящие системы 1, 2.
Наиболее близким по технической сущности к изобретению является цифровая слеояпцая система, содержащая задатчик, выход которого соединен с первым входом цифрового сумматора, второй вход которого через преобразователь угол-код подключен к приводу, кинематически связанному о элементом обратной связи, выход которого соединен со входом аналогового сумматора, другой вход которого через первы цифро-аналоговый преобразователь соединен с выходом задатчика, а также второй цифро-аналоговый преобразователь, вход
которого соединен с выходом цифрового сумматора .
Однако динамичность и точность работы присущая всем цифровым системам при огрничении на такт квантования по времени,
такой цифровой следящей системы недостаточны.
Целью изобретения является повышение точности и надежности цифровой следящей системы.
Эта цель достигается, тем, что аналого-цифровая следящая система содержит два нелинейных блока и дополнительный аналоговый сумматор, первый вход которого через первый нелинейный блок соединен с выходом второго цифро-аналогового преобразователя, второй через второй нелинейный блок - с выходом аналогового сумматора, а выход - с приводом,
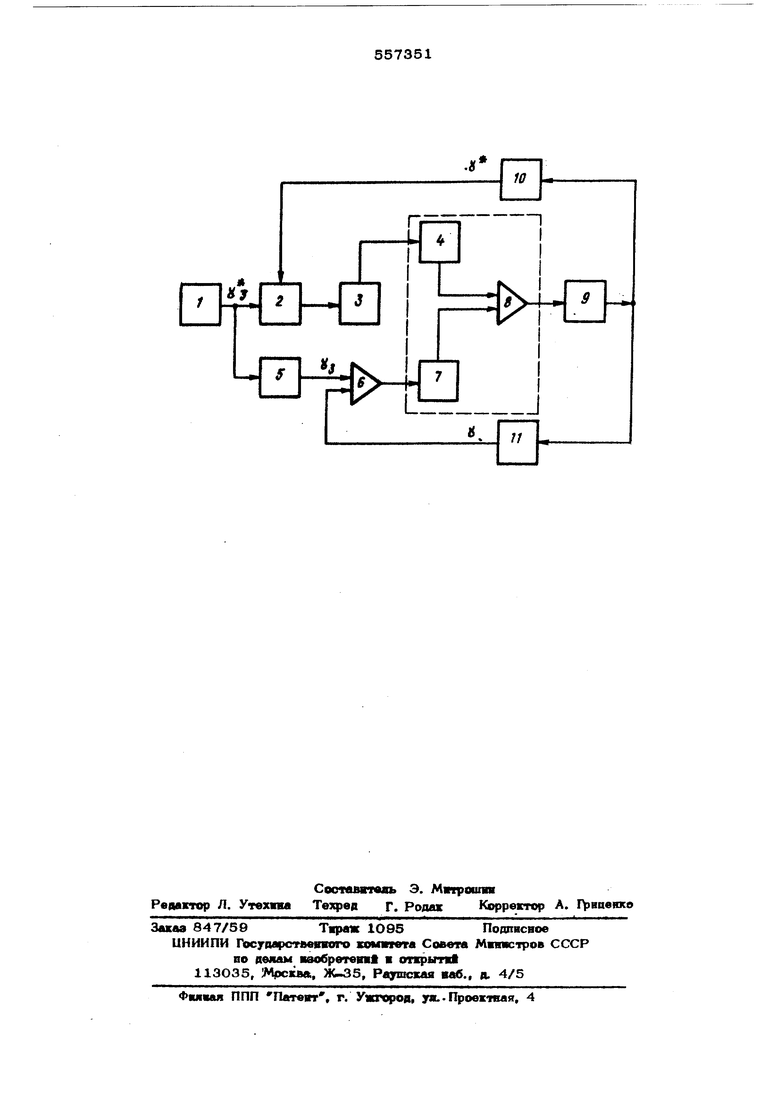
На чертеже представлена структурная ; схема аналого-цифровой следящей системы.
Система включает в себя задатчик 1, формирующий входные сигналы по положению, последовательно соединенные с ним цифровой и аналоговый каналы. Цифровой какал включает в себя цифровой сумматор 2 последовательно соединенные второй цифроаналоговый преобразователь 3, первый нелинейный блок 4, обеспечивающий работу цифрового контура при малых ошибках и
ошсточаюший его при больших ошибках. Аналоговый канал включает в себя первый пифро авапоговый преобразователь 5, последовательно соединенные аналоговый сумматор 6, второй нелинейный блок 7, обеспечивающий работу аналогового контура при больших ошибках и отключающий его при малых ошибках. Выходы соединены со входом дополнительного аналоговогосумматор 3, последовательно с которымсоединен привод 9, на нагрузке которого имеются преобразователь угол-код 10, формирукший сигналы по положению в цифровой форме. Выход преобразователя 10 соединен с входом сумматора 2. Элемент обратной 11 формирует сигнал по положению в аналоговой форме и соединен выходом с вкодом сумматора 6.
Схема работает следующим образом. Сигнал по подозкению в цифровой форме с задатчика подаётся на сумматор 2, где формируется сигнал ошибки, образованный входньтм сигналом и сигналом , поступающим с преобразователя угол-код 10, и на преобразователь 5. Ошибка, сформированная в сумматоре 2, поступает на преобразователь 3 и затем в аналоговом виде приходит на блок 4 синхронизирующего устройства. Сигнал преобразователя 5 поступает на сумматор 6, где формируется сигнал ошибки, образованной входным сигналом и сигналом У , поступающим с элемента обратной связи 11. Сформированная ошибка поступает на блок 7 синхронизирук шего устройства.
Синхронизирующее устройство работает так, что блок 4 пропускает сигнал ошибки до тех пор, пока ошибка не достигает заранее установленной величины, при этом блок 7 сигнал ошибки по своему контуру не пропускает. По достижении сигналом ошибки установленной величины открывается первый 7 и закрывается второй 4 нелинейные блоки.
Таким образом, синхронизирующее уст ройство осуществляет переключение цифро- вого и аналогового каналов. Выходы каналов обьецинены на сумматоре 8, связанном непосредственно с приводом 9, на котором установлены преобразователь угол-код и элемент обратной связи 11. Следовательно, в момент, когда ошибка системы достаточно велика, привод О работает как аналоговый, чем обеспечивается его высокая цинамика. По достижении ошибки системы малой, заранее установленной вели-
чины, срабатывает синхронизирующее уст ройство и вступает в работу цифровой контур, чем обеспечивается высокая статическая точность системы.
При использовании в цифровом приводе синхронизирующего устройства повышается динамическая точность системы, когда такт квантования по времени должен быть достаточно болыиим, что расширяет област ее применения, В то же время формированж цифровой обратной связи является весьма сложной задачей, так как при этом Аелязано множество преобразующих элементов и неисправность одного из вих приводит к обрыву обратной связи и потере устойчивости системы, В предложенной аналогоцифровой следящей системе этот недостаток устранен, что повышает надежность приводов и безопасность работы на них.
Формула изобретения
Аналогои,цифров ш следящая система, содержащая за;Ё9тчик, выход которого соединен с первым входом цифрового сумматора, второй вход которого через преобра-: зователь уголнкод подключен к приводу, кинематически связанному с элемеш ом обратной связи, выход которого соединен со входом аналогового сумматора, друг«Л вход которого через первый цифро-аналоговый преобразователь соединен с выходом задатчика, и второй цифро-аналоговый преобразователь, вход которого соединен с выходом цифрового сумматора, о т л и ч а ющ а я с я тем, что, с целью повышения точности работы, система содержит два нелинейных блока и дополнительный аналог вый сумматор, первый вход которого чё рез первый нелинейный блок соединен с выходом второго цифро-аналогового преобразователя, а второй вход через второй нелинейный блок соединен с выходом аналскгового сумматора, выход дополнительного аналогового сумматора соединен с приводом.
Источники информации, принятые во внимание при экспертизе изобретения:
№ 442458, М.кл. GO5 Б 13/О2, 1974 г (прототип).
«У
.«
10
11
