1
Изобретение относится к кузнечно-прес€овому оборудованию, в частности, к устройствам ДЛЯ подачи заготовок в рабочую зону пресса.
Известно устройство для подачи цилиндрических заготовок в рабочую зону пресса, содержащее ЛОТКОВЫЙ питатель с упором, механизм поштучной выдачи, механическую руку ДЛЯ перемещения заготовок по транспортной дорожке с приводом от ползуна пресса, снабженную захватом 1.
Цель изобретения - производить подачу цилиндрических заготовок .с высотой, меньще диаметра и со сферическими торцами.
Это достигается тем, что захват выполнен в виде двухплечего подпружиненного рычага, одно плечо которого несет плоский прижим ДЛЯ заготовок, а другое через .ролик контактирует с имеющимся на основании неподвижным копиром, а упор, установленный на выходе из лотка, представляет собой подпружиненный прижим с профильным выступом, контактируюп;им с заготовкой, при этом смонтированная на основании транспортная дорожка ДЛЯ заготовок имеет профиль призматического сечения и радиус кривизны, равный радиусу перемещения механической руки.
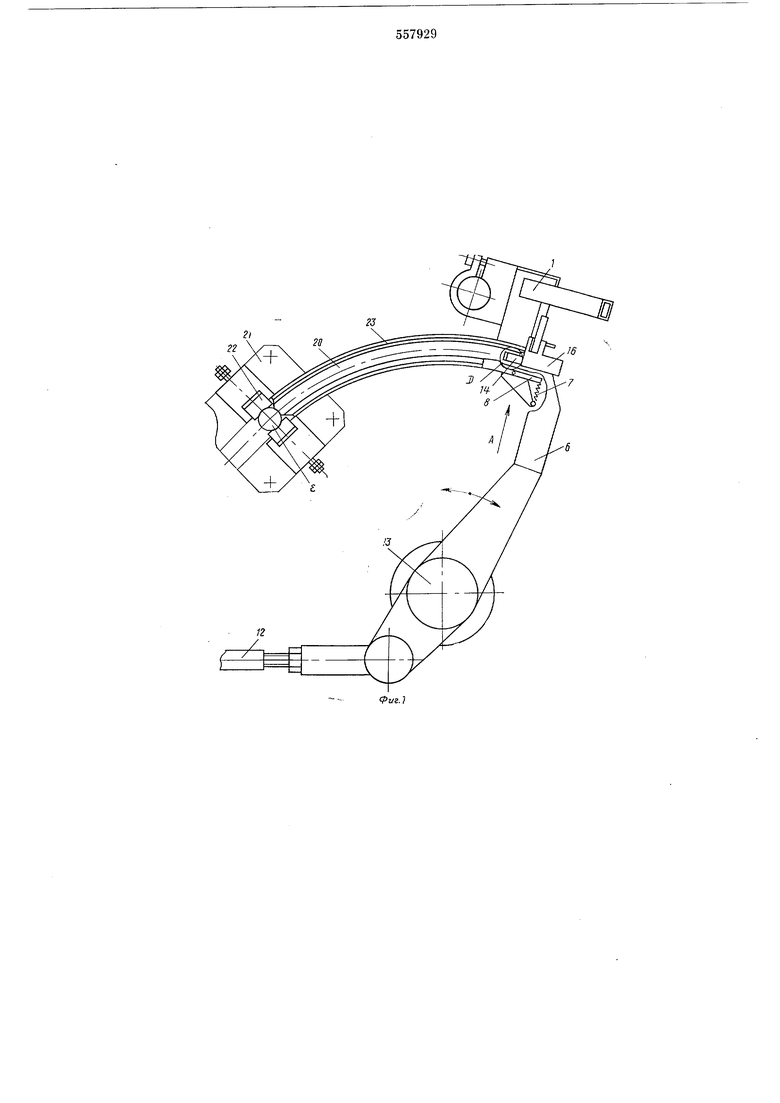
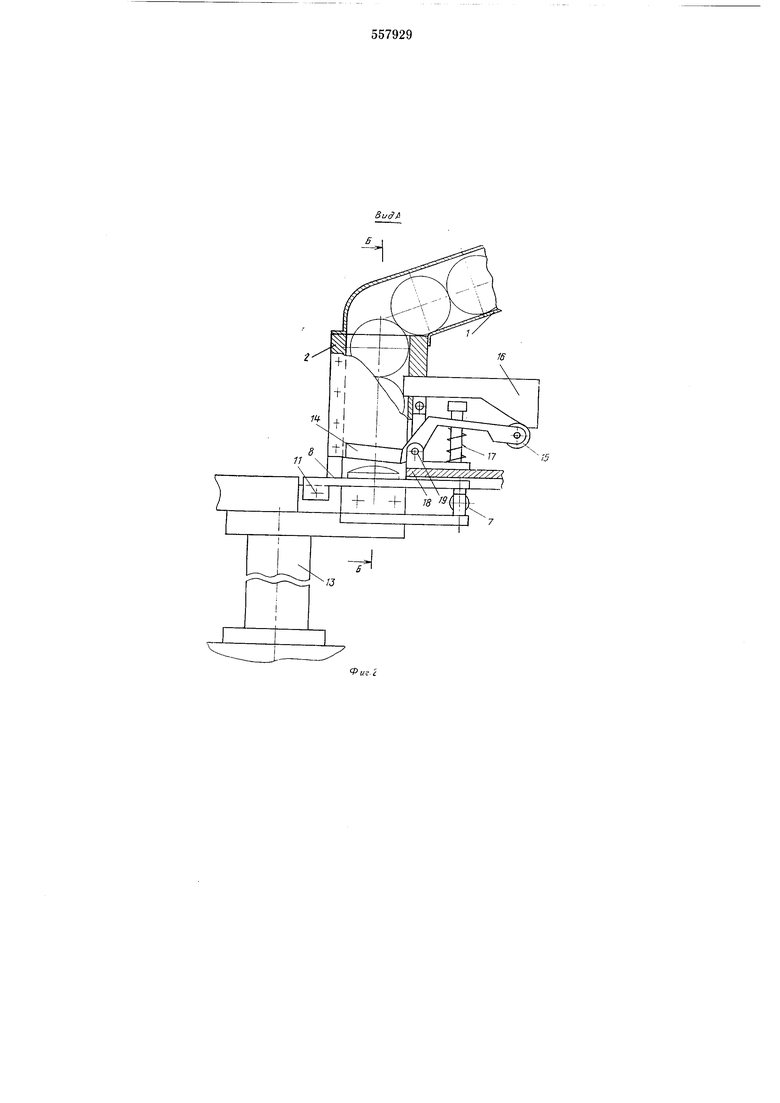
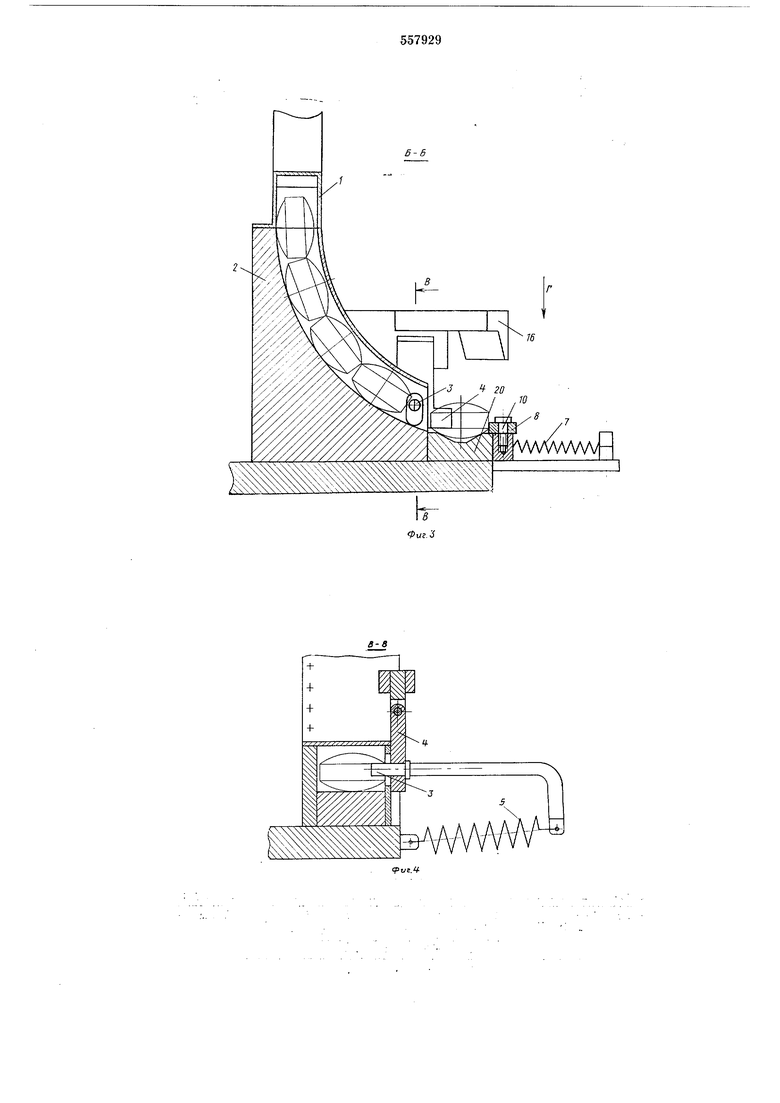
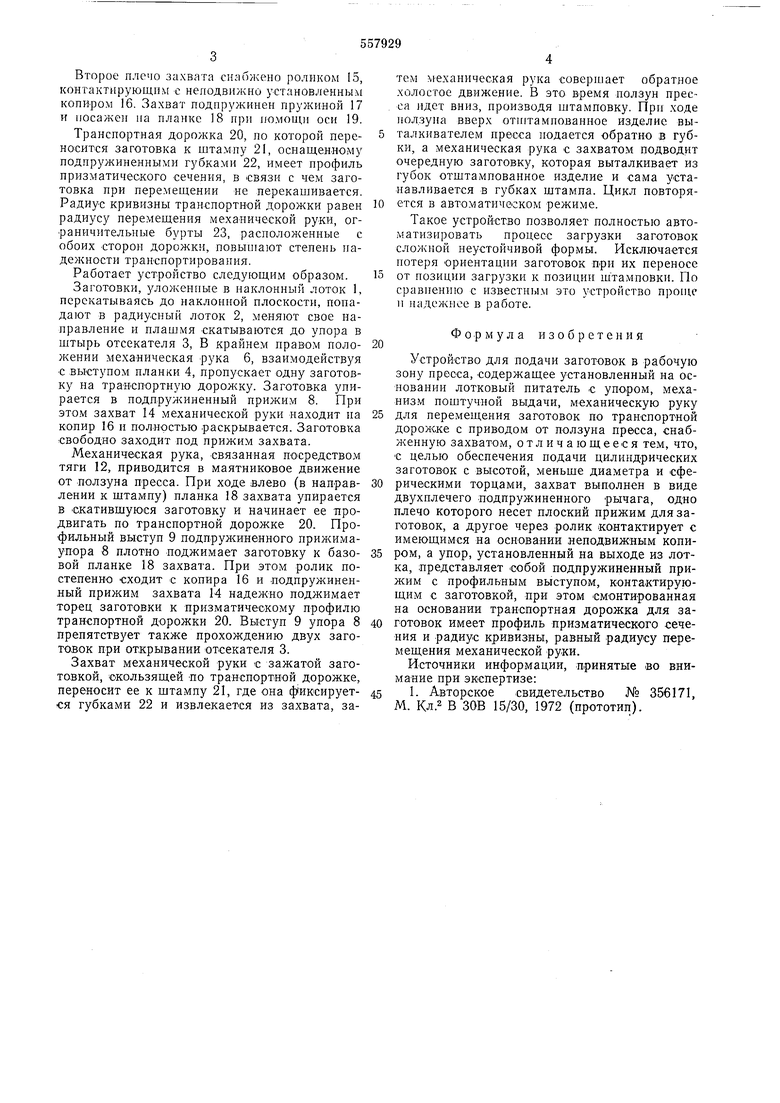
На фиг. 1 изображено предлагаемое устройство, вид сверху; -на фиг. 2 - вид -по стрелке А на фиг. 1; на фиг. 3 - разрез Б-Б на
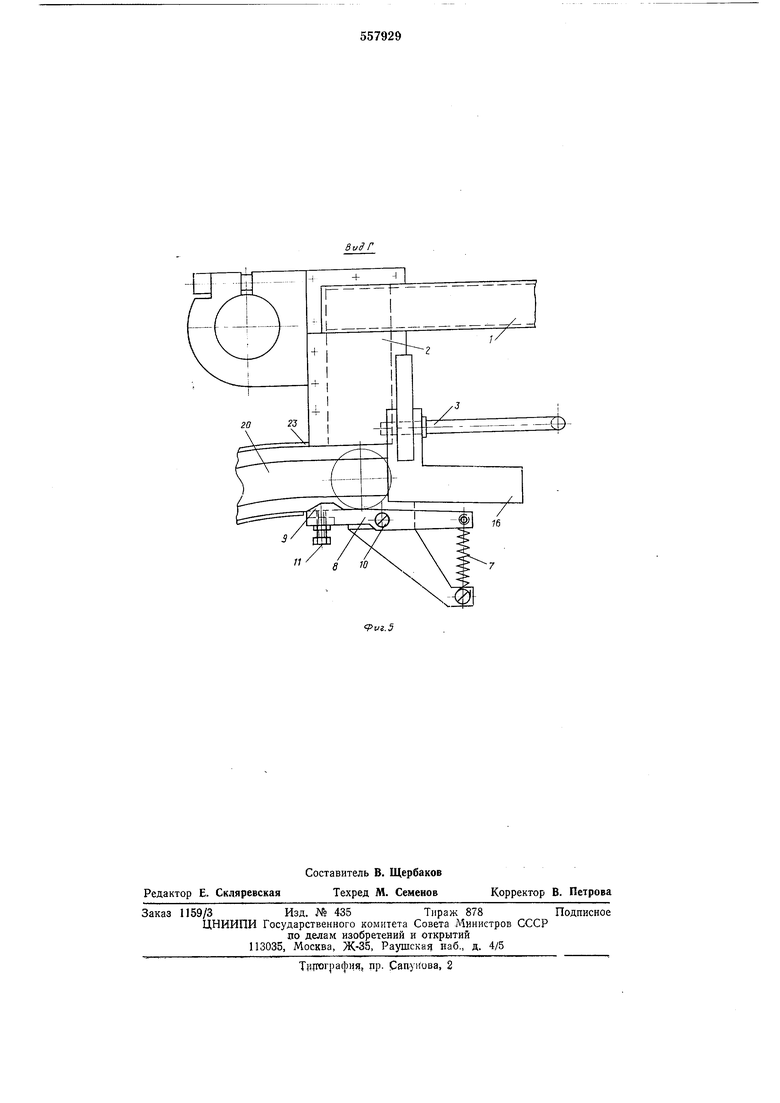
фиг. 2; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - вид по стрелке Г на фиг. 3.
Устройство содержит лотковый питатель, имеющий наклонный лоток 1, переходящий в
радиусный ЛОТОК 2, в нижней части которого размещен отсекатель 3 поштучной выдачи заготовок. Отсекатель выполнен в виде штыря, укрепленного на качающейся планке 4. Рабочий конец щтыря отсекателя выставлен через
овальный паз лотка 3 и задерживает столб заготовок. Нерабочий конец подпружинен пружиной 5. Механическая .рука 6 подает одну заготовку из позиции загрузки Д на позицию штамповки Е (фиг. 1).
На выходе из лотка 2 установлен упор, представляющий собой подпружиненный пружиной 7 прижим 8, имеющий на конце профильный выступ 9. посажен на пальце 10. Крайнее его положение ограничивается
.регулировочным винтом 11, размещенным под профильным выступом прижима (фиг. 5).
Посредством тяги 12 механическая рука соверптает возвратно-качательные (маятниковые) движения ЦИКЛИЧНО ползуну пресса, поворачиваясь при этом вокруг осп 13. На конце механической руки укреплен захват 14, выполненный в виде двухплечего рычага, одно плечо которого снабжено плоским прижимом ДЛЯ поджатия заготовок.
Второе плечо захвата снабжено роликом 15, контактирующим с неподвижно установленным копиром 16. Захват подпружинен пружиной 17 и посажен па планке 18 при UOMOHUI оси 19.
Транспортная дорожка 20, по которой переносится заготовка к штампу 21, оснащенному подпружиненными губками 22, имеет ирофиль призматического сечения, в связи с чем заготовка при перемещении не перекагпивается. Радиус кривизны транспортной дорожки равен радиусу перемещения механической руки, ограничительные бурты 23, расположенные с обоих сторон дорожки, повыи1ают степень надежности транспортирования.
Работает устройство следующим образом.
Заготовки, заложенные в наклонный лоток 1, перекатываясь до наклонной плоскости, попадают в радиусный лоток 2, меняют свое направление и плашмя скатываются до упора в штырь отсекателя 3, В крайнем правом полол ении механическая рука 6, взаимодействуя с выступом планки 4, пропускает одну заготовку на транспортную дорожку. Заготовка упирается в подпружиненный прижим 8. При этом захват 14 механической руки находит на копир 16 и полностью раскрывается. Заготовка свободно заходит под прижим захвата.
Механическая рука, связанная посредством тяги 12, приводится в маятниковое движение от ползуна пресса. При ходе влево (в направлении к штампу) планка 18 захвата упирается в скатившуюся заготовку и начинает ее лродвигать по транспортной дорожке 20. Профильный выступ 9 подпружиненного прижимаупора 8 плотно поджимает заготовку к базовой планке 18 захвата. При этом ролик постепенно сходит с копира 16 и подпружиненный прижим захвата 14 надежно поджимает торец заготовки к призматическому профилю транспортной дорожки 20. Выступ 9 упора 8 препятствует также прохождению двух заготовок при открывании отсекателя 3.
Захват механической руки с зажатой заготовкой, скользящей по транспортной дорожке, переносит ее к щтампу 21, где она ф иксируется губками 22 и извлекается из захвата, затем механическая рука совершает обратное
холостое движение. В это время ползун пресса идет вниз, производя штамповку. При ходе
ползуна вверх отштампованное изделие выталкивателем пресса подается обратно в губки, а механическая рука с захватом подводит очередную заготовку, которая выталкивает из губок отштампованное изделие и сама устанавливается в губках штампа. Цикл повторяется в автоматическом режиме.
Такое устройство позволяет полностью автоматизировать процесс загрузки заготовок сложной неустойчивой формы. Исключается потеря ориентации заготовок при их переносе
от позиции загрузки к позиции штамповки. По сравнению с известнылт это устройство проще II наделчнее в работе.
Формула изобретения
Устройство для подачи заготовок в рабочую зону пресса, содержащее установленный на основании лотковый питатель с упором, механизм поштучной выдачи, механическую руку
для перемещения заготовок по транспортной дорожке с приводом от ползуна , снабженную захватом, отличающееся тем, что, с целью обеспечения подачи цилиндрических заготовок с высотой, меньше диаметра и сферическими торцами, захват выполнен в виде двухплечего подпружиненного рычага, одно плечо которого несет плоский прижим для заготовок, а другое через ролик контактирует с имеющимся на основании неподвижным копиром, а упор, установленный на выходе из лотка, представляет собой нодпружиненный прижим с профильным выступом, контактирующим с заготовкой, при этом смонтированная на основании транспортная дорожка для заготовок имеет профиль призматического сечения и радиус кривизны, равный радиусу перемещения механической руки.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство № 356171, М. Кл.2 В ЗОВ 15/30, 1972 (прототип).
/
22
Б-В
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для заготовки и натяжения арматурных стержней | 1986 |
|
SU1411415A1 |
| Устройство для подачи штучных заготовок в рабочую зону пресса | 1985 |
|
SU1368076A1 |
| Механизм поштучной выдачи заготовок | 1972 |
|
SU442874A1 |
| Устройство для подачи заготовок | 1986 |
|
SU1409383A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Устройство для манипулирования заготовками типа труб | 1974 |
|
SU504597A1 |
| Механизм подачи заготовок к прессу | 1986 |
|
SU1424935A1 |
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ШТУЧНЫХ ЗАГОТОВОК В ЗОНУОБРАБОТКИ | 1970 |
|
SU269908A1 |
| РОТОРНАЯ МАШИНА СБОРКИ | 1992 |
|
RU2014195C1 |