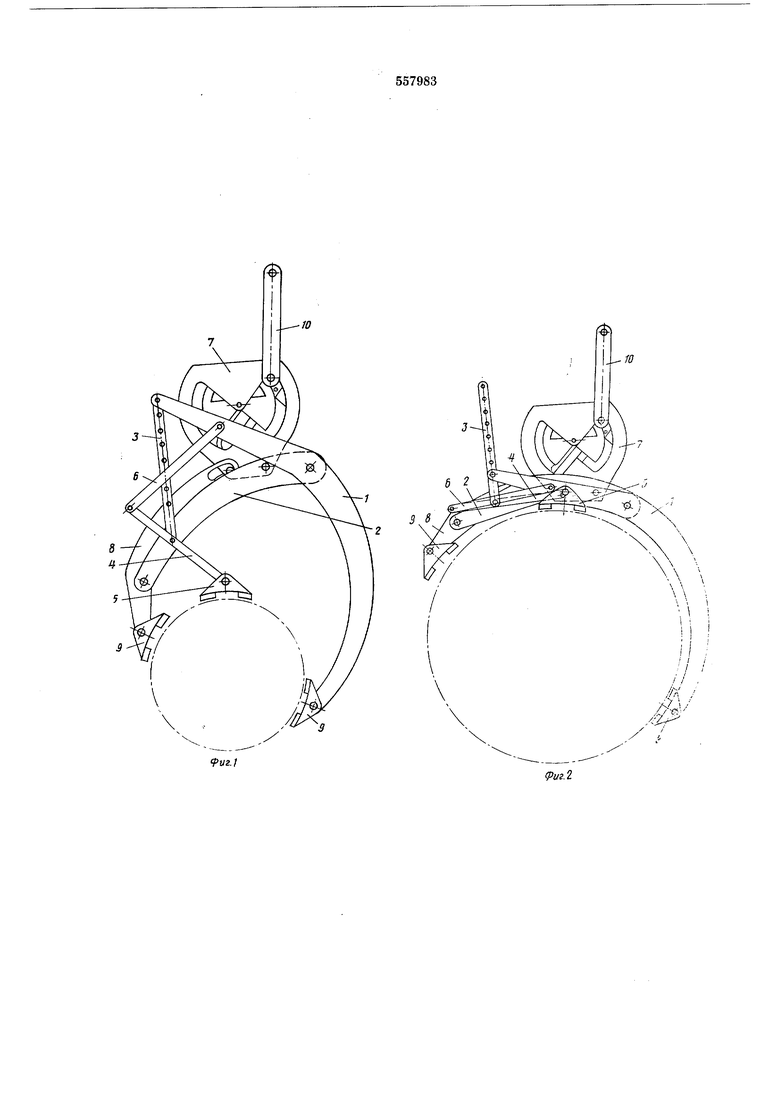
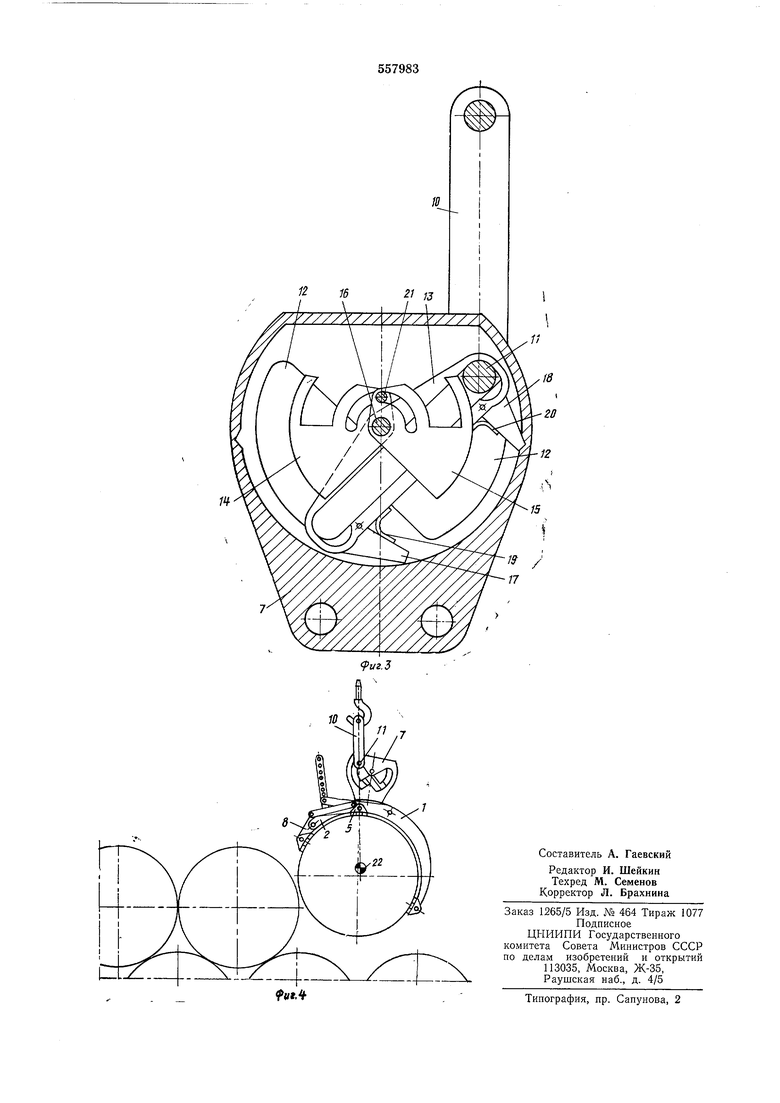
жимной рычаг 8, который, взаимодействуя с корпусом 7, захватывает груз. Для захвата груза на зажимных рычагах 1 и 8 Ихмеются лапы 9. Захват навешивается на грузоподъемную машину прн помошн серьги 10, на которой имеется палец И, проходящий через пазы 12 корпуса 7 замыкаюш,его механизма и взаимодействуюш.ий с коромыслом 13 и эксцентриками 14 и 15, качающимися на осн 16. Коромысло 13 фиксируется защелками 17 и 18, которые прижимаются к корпусу 7 пружинами 19 и 20. Поворот эксцентриков 14 и 15 ограничивается стопором 21.
Захват работает следующим образом. Захват заранее устанавливают на диаметр перегружаемых предметов. При наведении порожнего захвата на штабель груза (фиг. 4) серьга 10 находится в верхнем правом положении, и палец И упирается в корпус 7 замыкающего механизма. Центр тяжести порожнего захвата находится на одной вертикали с пальцем И, а корпус 7 замыкающего механизма, взаимодействуя с залчИмЬым рычагом 8, удерживает последний в отведенном положении.
После опускания опорного башмака 5 на груз серьга 10 продолжает опускаться под действием своего веса, и палец И (фиг. 3) давит на защелку 18, в результате чего пружина 20 сжимается и защелка 18 выходит нз зацепления с корпусом 7. Скользя по эксцентрпку 15 и поворачивая коромысло 13 пальцем И по часовой стрелке, серьга 10 переходит из правого верхнего положения в правое нижнее. При этом защелка 17 под действием пружины 19 заходит в углубление корпуса 7, фиксируя коромысло 13 в крайнем положении.
При подъеме захвата палец И серьги 10 скользит по корОлМЫслу 13, поворачивая эксцентрик 14 вверх. После того как серьга 10 займет левое верхнее положение, палец 11 упрется в корпус 7 замыкающего механизма, и эксцентрик 14 под действием своего веса займет исходное положение, корпус 7 замыкающего механизма повернется по часовой стрелке, и зажимной рычаг 8 захватит груз. Груженый захват поднимается над штабелем, причем его центр тяжести 22 (фиг. 5; будет лежать на одной вертикали с серьгой 10.
После установки груза на предназначенное для него место серьга 10 под действием своего веса продолжает опускаться и давит пальцем И (фиг. 3) на защелку 17, в результате чего пружнпа 19 сжимается и защелка 17 выходит из зацепления с корпусом 7. Скользя по эксцентрику 14 и поворачивая коромысло 13 пальцем И против часовой стрелки, серьга
10переходит из левого верхнего в левое нижнее положение. При этом защелка 18 под действием пружины 20 заходит в углубление корпуса 7, фнкснруя коромысло 13 в крайнем положении.
При дальнейшем подъеме серьги 10 палец
11скользит по коро.мыслу 13, поворачивая эксцентрик 15 вверх. После того как серьга 10 займет правое верхнее положение, палец 1 i упрется в корпус 7 замыкающего механизма, и эксцентрик 15 под действием своего веса займет исходное положение, корпус 7 замыкающего механизма повернется против часовой стрелки, н зажимной рычаг 8 освободит груз. Порожний захват подни.адется над грузом, приче.м его центр тяжести будет лежать па одной вертика.чп с пальцем 11.
Далее рабочий цикл повторяется.
Ф о р .1 у л а изобретения
1.Захват для цилиндрических изделий, содержащий траверсу с прицепной серьгой и двумя зажимными рычагами, один из которых закреплен неподвижно относительно траверсы, и замыкающий механизм, шарнирно соединенный с траверсой н подвижным зажпмным рычагом, отличающийся тем, что, с целью обеспеченпя перегрузки изделий, уложенных без зазора, зажимные рычаги распололсены на разной высоте, а в корпусе замыкающего механизма шарпирно установлены коромысло и два эксцентрика, причем коромысло выполнено с пазом, в котором подвижно установлен палец прицепной серьги, а на концах коромысла закреплены подпружиненные защелки, фиксирующие его в крайних положениях.
2.Захват по п. 1, отличающийся тем, что, с целью облегчения наведения его на изделие, на траверсе установлен двуплечий рычаг с опорным башмаком па одном плече, соединенный другим плечом с пеподвижпым зал пмпым рычагом.
Ю
Риг.;
10
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для НАВЕШИВАНИЯ И СЪЕЛи ПРИКРЕПЛЕННБ1Х К ТРАВЕРСЕ ГРУЗОВ С КРЮКОВ ГРУЗОВЫХ ТЕЛЕЖЕК НОДВЕСНОГО ТОЛКАЮЩЕГОКОНВЕЙЕРА | 1965 |
|
SU173137A1 |
| Захват | 1987 |
|
SU1463685A1 |
| Ручной привод тормоза | 1975 |
|
SU660870A1 |
| Грузозахватное устройство | 1985 |
|
SU1286496A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| Пакетодержатель кирпича | 1989 |
|
SU1673462A2 |
| Механизм фиксации элементов грузозахватного устройства | 1981 |
|
SU1006355A1 |
| Автоматическая каретка подвесной канатной установки | 1973 |
|
SU495223A1 |
| Захват-кантователь для грузовцилиНдРичЕСКОй фОРМы | 1979 |
|
SU850544A2 |
| Кривошипно-ползунный механизм | 1986 |
|
SU1455097A1 |